基于无人机影像的高精度路面、边坡裂缝识别方法
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及地质勘探识别技术领域,具体为基于无人机影像的高精度路面、边坡裂缝识别方法。
背景技术
裂缝是路面最常见的病害,由于其纹理复杂、目标多样且受光照影响等复杂特征,成为路面图像中最难识别的目标,因此路面裂缝检测一直是热门研究课题,在过去研究中也取得了许多有意义的成果,路面养护主要应用于机场和道路建设,在交通荷载和自然因素的作用下,现有的公路会逐渐产生各种病害,这些病害会严重影响路面的承载力和耐久性,以及车辆的行驶速度、燃料消耗和行车安全等,路面破损图像的自动识别是交通信息工程和模式识别领域中的一个经典问题,引起了相关研究人员的广泛关注,因此本发明提出一种基于无人机影像的高精度路面、边坡裂缝识别方法,可以大幅度提高裂缝的识别精度,使得裂缝识别更加精准高效。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了基于无人机影像的高精度路面、边坡裂缝识别方法,负载车上设置有无人机跟踪定位设备,通过车载智能平台和无人机跟踪定位设备,负载车在路面行驶的过程中,无人机可以保持定速巡航,始终处于负载车的正前方处进行路面高空拍摄,且通过车载环景相机和无人全景相机,可以将该区域的地貌3D化,使得捕捉到的裂缝的形状和面积更加的精准,且配合动态检测设备,可以检测出路面的平坦度。
(二)技术方案
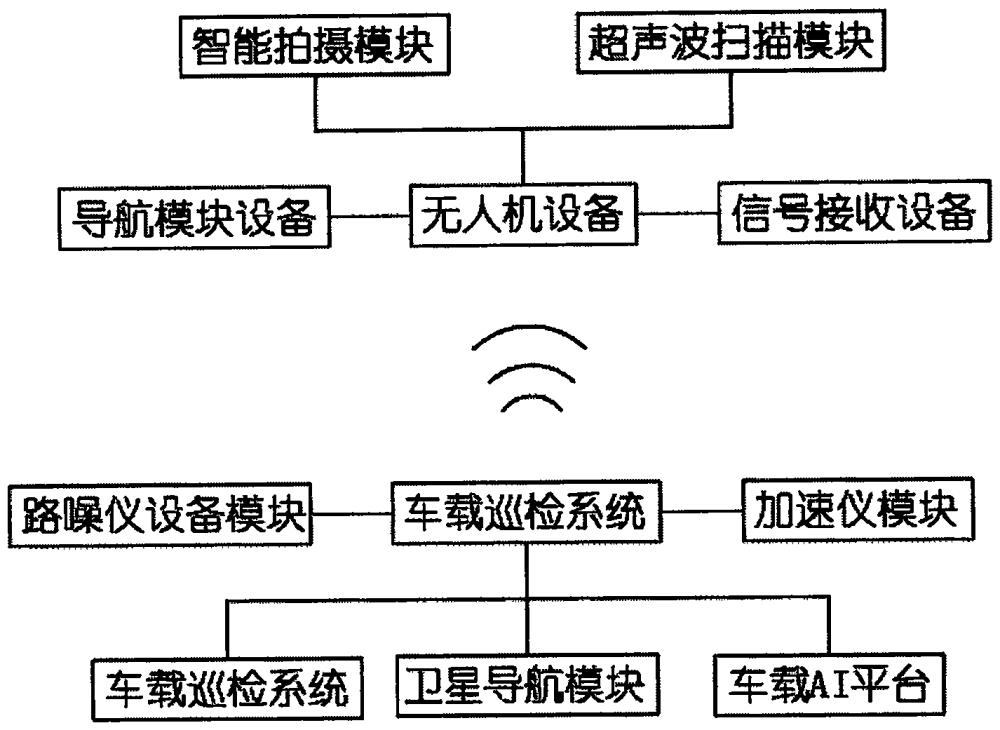
为实现以上目的,本发明通过以下技术方案予以实现:基于无人机影像的高精度路面、边坡裂缝识别方法,包括车载巡检系统,其特征在于:所述车载巡检系统包含有路噪仪设备模块和加速仪模块,所述车载巡检系统包含有车载巡检系统和卫星导航模块以及车载AI平台模块,所述车载巡检系统通过无线网络连接有无人机设备,所述无人机设备包含有导航模块设备和信号接收设备,所述无人机设备包含有智能拍摄模块和超声波扫描模块。
优选的,所述车载巡检系统内安装有一整套完整的路面智能巡检系统,所述路面智能巡检系统包含有拍摄系统模块,所述路面智能巡检系统包含有动态检测设备模块,所述路面智能巡检系统包含有定位系统模块。
优选的,所述拍摄系统模块包含有车载环景相机模块和无人机全景相机模块,车载环境相机模块安装在负载车的车顶,无人机全景相机模块安装在无人机的机腹底部。
优选的,所述动态检测设备模块包含有路噪仪检测设备模块和胎压检测仪器模块,路噪仪检测设备安装在负载车的后端底部,胎压检测仪器安装在负载车的轮胎处。
优选地,所述定位系统模块包含有卫星定位设备模块和无人机跟踪定位设备模块,卫星定位设备安装在负载车和无人机内部,可以对无人机和负载车进行精准定位,所述无人机跟踪定位设备安装在负载车上,可以跟踪无人机并且设定无人机定速巡航模式,使得无人机与负载车车速时刻保持一致。
优选的,所述无人机全景相机和车载环境相机在移动的过程中,对路面的裂缝和坑槽进行捕捉和抓拍,所述负载车在行驶的过程中,路噪仪和胎压检测仪通过负载车行在路面行驶的过程胎压的变化和在路面发出的噪声来检测路面的平坦程度。
工作原理:该基于无人机影像的高精度路面、边坡裂缝识别方法的步骤如下:
S1:车载巡检系统的车载AI平台建立道路和边坡裂缝的样本数据库;
S2:工作人员驾驶负载车在路面上行驶,并且操控无人机在负载车的正上方进行高空拍摄,对负载车行驶区域的地貌路面和边坡进行拍摄,当无人机拍摄到路面或者边坡的裂缝后,工作人员可以通过手动控制无人机靠近裂缝,通过智能拍摄模块详细对裂缝区进行拍摄,并且可以通过超声波扫描模块对裂缝区域的地貌进行详细的地貌扫描;
S3:拍摄的图像和扫描的地貌数据通过网络设备发送至负载车巡检系统的车载AI平台上;
S4:车载智能AI平台对车载环景相机和无人机全景相机拍摄的图片和超声波地貌扫描数据进行智能识别和处理;
S5:车载智能AI平台基于海量数据库对图像进行深度对比和研究,智能识别出道路上和边坡上的裂缝,智能识别和处理的内容包括裂缝检测,补充灰度化,矫正和拼接,去噪、平滑,分割裂缝,分析几何特征,使得裂缝的数据更加真实,并且对裂缝的数据进行记录;
S6:车载动态检测设备的路噪仪检测设备和胎压检测仪器设备同时对负载车行驶过多路面的平坦度进行检测和数据记录;
S7:车载智能AI平台对所有的数据进行综合研究和分析,得出该区域的路面和边坡的裂缝的具体地标以及面积大小和形状等各种数据,进行数据备份并且上传至网络地图中进行标记。
(三)有益效果
本发明提供了基于无人机影像的高精度路面、边坡裂缝识别方法。具备以下有益效果:
本发明提供了基于无人机影像的高精度路面、边坡裂缝识别方法,通过在负载车上设置有一个方便起降的无人机收放平台,且负载车上设置有无人机跟踪定位设备,通过车载智能平台和无人机跟踪定位设备,负载车在路面行驶的过程中,无人机可以保持定速巡航,始终处于负载车的正前方处进行路面高空拍摄,从而保证无人机拍摄的画面更加全面,且通过车载环景相机和无人全景相机,可以将该区域的地貌3D化,使得捕捉到的裂缝的形状和面积更加的精准,通过智能AI平台智能识别和处理的内容包括裂缝检测,补充灰度化,矫正和拼接,去噪、平滑,分割裂缝,分析几何特征等,使得裂缝的数据更加真实,从而大幅度提高裂缝识别的精度,且配合动态检测设备,可以检测出路面的平坦度,通过车载智能AI可以实时对捕捉的画面和数据从而进一步提高了路面以及边坡裂缝识别的精度。
附图说明
图1为本发明的基于无人机影像的高精度路面、边坡裂缝识别方法的系统总图;
图2为本发明的基于无人机影像的高精度路面、边坡裂缝识别方法的巡检系统图;
图3为本发明的基于无人机影像的高精度路面、边坡裂缝识别方法的方法流程图;
图4为本发明的基于无人机影像的高精度路面、边坡裂缝识别方法的工作示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
如图1-4所示,本发明实施例提供基于无人机影像的高精度路面、边坡裂缝识别方法,包括车载巡检系统,车载巡检系统包含有路噪仪设备模块和加速仪模块,车载巡检系统包含有车载巡检系统和卫星导航模块以及车载AI平台模块,车载巡检系统通过无线网络连接有无人机设备,无人机设备包含有导航模块设备和信号接收设备,无人机设备包含有智能拍摄模块和超声波扫描模块。
车载巡检系统内安装有一整套完整的路面智能巡检系统,路面智能巡检系统包含有拍摄系统模块,路面智能巡检系统包含有动态检测设备模块,所述路面智能巡检系统包含有定位系统模块,拍摄系统模块包含有车载环景相机模块和无人机全景相机模块,车载环境相机模块安装在负载车的车顶,无人机全景相机模块安装在无人机的机腹底部,动态检测设备模块包含有路噪仪检测设备模块和胎压检测仪器模块,路噪仪检测设备安装在负载车的后端底部,胎压检测仪器安装在负载车的轮胎处,定位系统模块包含有卫星定位设备模块和无人机跟踪定位设备模块,卫星定位设备安装在负载车和无人机内部,可以对无人机和负载车进行精准定位,无人机跟踪定位设备安装在负载车上,可以跟踪无人机并且设定无人机定速巡航模式,使得无人机与负载车车速时刻保持一致,无人机全景相机和车载环境相机在移动的过程中,对路面的裂缝和坑槽进行捕捉和抓拍,负载车在行驶的过程中,路噪仪和胎压检测仪通过负载车行在路面行驶的过程胎压的变化和在路面发出的噪声来检测路面的平坦程度。
该基于无人机影像的高精度路面、边坡裂缝识别方法的步骤如下:
S1:车载巡检系统的车载AI平台建立道路和边坡裂缝的样本数据库;
S2:工作人员驾驶负载车在路面上行驶,并且操控无人机在负载车的正上方进行高空拍摄,对负载车行驶区域的地貌路面和边坡进行拍摄,当无人机拍摄到路面或者边坡的裂缝后,工作人员可以通过手动控制无人机靠近裂缝,通过智能拍摄模块详细对裂缝区进行拍摄,并且可以通过超声波扫描模块对裂缝区域的地貌进行详细的地貌扫描;
S3:拍摄的图像和扫描的地貌数据通过网络设备发送至负载车巡检系统的车载AI平台上;
S4:车载智能AI平台对车载环景相机和无人机全景相机拍摄的图片和超声波地貌扫描数据进行智能识别和处理;
S5:车载智能AI平台基于海量数据库对图像进行深度对比和研究,智能识别出道路上和边坡上的裂缝,智能识别和处理的内容包括裂缝检测,补充灰度化,矫正和拼接,去噪、平滑,分割裂缝,分析几何特征,使得裂缝的数据更加真实,并且对裂缝的数据进行记录;
S6:车载动态检测设备的路噪仪检测设备和胎压检测仪器设备同时对负载车行驶过多路面的平坦度进行检测和数据记录;
S7:车载智能AI平台对所有的数据进行综合研究和分析,得出该区域的路面和边坡的裂缝的具体地标以及面积大小和形状等各种数据,进行数据备份并且上传至网络地图中进行标记。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。