一种机器人防碰撞方法
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及机器人防碰撞技术领域,尤其涉及一种机器人防碰撞方法。
背景技术
随着工业机器人的推广应用,多机器人协作、机器人与人协作的场合日益增多,对工业机器人安全性提出了更高的要求。由于工业机器人自由度多、动作复杂,在不可预料的情况下,容易与其他机器人或周围的物体发生碰撞,损坏机械手或物件。操作人员操作机器人的过程中,也不可避免的需要与机器人接触。因此,如何在开放的工作环境内实现机器人的碰撞保护,成为工业机器人交互安全控制领域至关重要的问题。
现有的解决方案即存在的问题如下:
1.采用腕力传感器来检测碰撞:该方法可以精确检测手抓末端的碰撞力,一般应用于磨削力、装配力等手抓末端碰撞力的检测;但是其无法检测机器人其它部位的碰撞,故而检测范围受限;
2.采用力/力矩传感器来检测碰撞:机器人每个关节都装有力/力矩传感器,可以精准的检测外力;但是其成本太高,无法普及;
3.采用感知皮肤来检测碰撞:该方法将感知皮肤覆盖在机器人全身,可检测到任意部位的碰撞;但是其布线比较复杂,抗干扰能力较差,且极大的增加了处理器的运算量。
综上,凡是使用外部传感器检测碰撞或碰撞力的方法,都不可避免的导致系统成本和复杂程度的大幅上升。因此,急需一种新的技术方案来解决上述存在的技术问题。
发明内容
本发明的目的在于克服上述现有技术的问题,提供了一种机器人防碰撞方法,用于解决传统技术中采用外部传感器进行检测存在的检测范围受限、成本高以及布线复杂的技术问题。
上述目的是通过以下技术方案来实现:
一种机器人防碰撞方法,包括如下步骤:
步骤(1)采样记录反馈转矩以及给定加速度;
步骤(2)根据步骤(1)中所述反馈转矩和所述给定加速度变化趋势确定节点;
步骤(3)对横轴坐标进行CenterAndScale处理,计算每段数据的多项式系数;
步骤(4)开始监控,根据内部计时检索对应的多项式系数,计算理论转矩值;
步骤(5)若反馈转矩超过所述理论转矩值一定时间,则报警;若反馈转矩未超过所述理论转矩值一定时间,则返回步骤(4)继续监控。
进一步地,所述步骤(2)具体包括:
步骤(2-1)确定给定加速度节点若加速度波形为方波,则选取全部加速度突变点;若若加速度波形为三角波,则选取三角波两端点,跳过加速度峰值点;
步骤(2-2)划定反馈转矩区域根据已知给定加速度节点,划定相邻两节点所对应转矩的后半部分为一区域;
步骤(2-3)确定最终节点根据上述步骤划分出的反馈转矩相对稳定的区域,计算出各区域反馈转矩均值,通过比较数值的方式,判断反馈转矩是否进入或者脱离各区域,最终确定相应节点。
进一步地,所述步骤(3)具体为:将所述横轴坐标减去均值,再除以标准差,得到新的横轴坐标;利用最小二乘法对采样反馈转矩进行多项式拟合;其中,横轴数据为CenterAnd Scale换算后时间数据,纵轴数据为反馈转矩。
进一步地,所述利用最小二乘法对采样反馈转矩进行多项式拟合中,最小二乘法通过最小化误差的平方和寻找数据的最优函数匹配。
有益效果
本发明所提供的一种机器人防碰撞方法,通过监控电流或转矩来检测碰撞,省去额外安装相关传感器,使得检测成本更低;此外检测范围不再仅限于传感器安装位置才能检测碰撞,可以应用于机器人任意位置的碰撞检测,使得检测范围更广。
附图说明
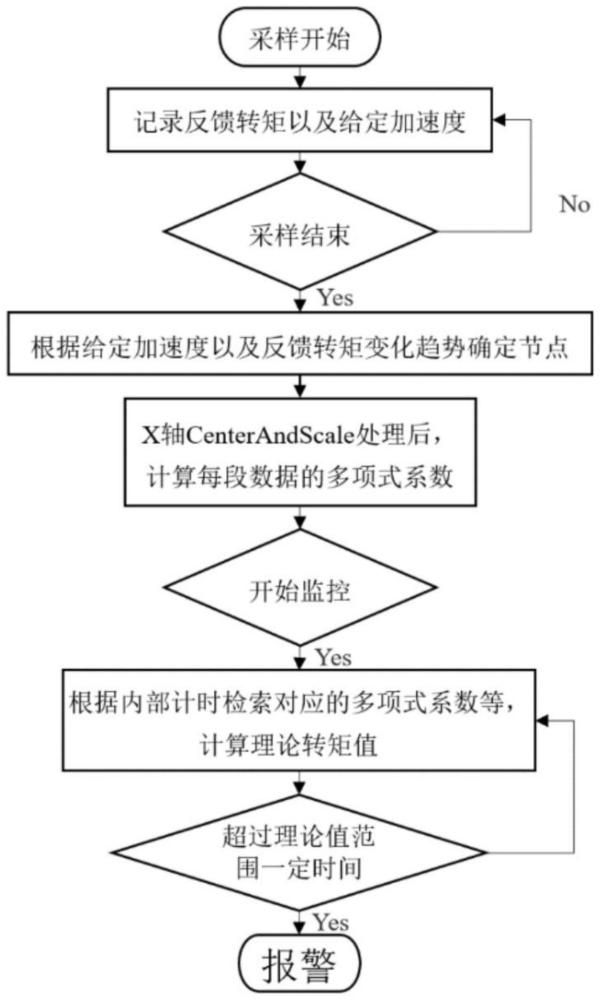
图1为本发明所述一种机器人防碰撞方法的流程图。
具体实施方式
下面根据附图和实施例对本发明作进一步详细说明。所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
如图1所示,一种机器人防碰撞方法,包括如下步骤:
步骤(1)采样记录反馈转矩以及给定加速度;
步骤(2)根据步骤(1)中所述反馈转矩和所述给定加速度变化趋势确定节点;
步骤(3)对横轴坐标进行Center And Scale处理,计算每段数据的多项式系数;
步骤(4)开始监控,根据内部计时检索对应的多项式系数,计算理论转矩值;
步骤(5)若反馈转矩超过所述理论转矩值一定时间,则报警;若反馈转矩未超过所述理论转矩值一定时间,则返回步骤(4)继续监控。
本方案采样期间记录下给定加速度和反馈转矩,根据给定加速度变化节点和反馈转矩变化趋势最终选取恰当的分段拟合节点。
其中,本实施例适用加速度波形为方波与三角波,所述步骤(2)具体包括:
步骤(2-1)确定给定加速度节点若加速度波形为方波,则选取全部加速度突变点;若若加速度波形为三角波,则选取三角波两端点,跳过加速度峰值点;
步骤(2-2)划定反馈转矩区域根据已知给定加速度节点,考虑到反馈滞后于给定若干周期,划定相邻两节点(两节点内加速度恒定)所对应转矩的后半部分为一区域;
步骤(2-3)确定最终节点根据上述两步骤已经划分出了反馈转矩相对稳定的区域,计算出各区域反馈转矩均值,通过比较数值的方式,判断反馈转矩是否进入或者脱离各区域,最终确定相应节点。
为避免横轴坐标跨度过大,对横轴坐标进行Center And Scale处理,描述见所述步骤(3),具体为:将所述横轴坐标减去均值,再除以标准差,得到新的横轴坐标;利用最小二乘法对采样反馈转矩进行多项式拟合;其中,横轴数据为Center And Scale换算后时间数据,纵轴数据为反馈转矩。
利用最小二乘法对采样反馈转矩进行多项式拟合,横轴数据为Center And Scale换算后时间数据,纵轴数据为反馈转矩;
其中,最小二乘法(Least Square Method,LSM)通过最小化误差(也叫残差)的平方和寻找数据的最优函数匹配。
具体的,假设给定一组样本数据集P(x,y),P内各数据点P
针对样本数据集P内各数据点的误差平方和为:
最小二乘法认为,最优函数的各项系数θ
最后,监控重复运动时根据内部计时自动检索相应的拟合数据(节点、系数等),计算出拟合转矩值,反馈转矩若超过拟合值一定范围则会发出报警。
以上所述仅为说明本发明的实施方式,并不用于限制本发明,对于本领域的技术人员来说,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。