一种基于全景视觉的激流识别与方位报警装置
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及全景视觉技术领域,具体为一种基于全景视觉的激流识别与方位报警装置。
背景技术
全景视觉的激流识别是指利用全景图像或全景视频数据进行激流的识别和跟踪技术,通过对场景中的快速运动物体进行分析和处理,实现对运动物体的检测和跟踪功能;
基于全景视觉的激流识别与方位报警装置是基于先进的AI人工智能模型和机器学习技术开发的,其背景始于近年来发生过的多起船只被激流破坏甚至导致人员伤亡的事故,进而提高了船舶在激流航行的过程中不可控性以及危险性,为此我们提出了一种基于全景视觉的激流识别与方位报警装置。
发明内容
本发明的目的在于提供一种基于全景视觉的激流识别与方位报警装置,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种基于全景视觉的激流识别与方位报警装置,包括支撑底座,还包括;
支撑杆,所述支撑杆活动安装在支撑底座顶端左侧,所述支撑杆顶端活动安装有十字型安装架,所述支撑底座底端前侧与后侧活动安装有固定块;
灯光报警组件,所述灯光报警组件活动安装在支撑底座顶端右侧,所述灯光报警组件包括U型安装板,所述U型安装板活动安装在支撑底座顶端右侧;
全景视角激流数据采集组件,所述全景视角激流数据采集组件活动安装在十字型安装架顶端,所述全景视角激流数据采集组件包括支撑架,四个所述支撑架活动安装在十字型安装架顶端四周;
夹持组件,所述夹持组件活动安装在固定块底端,所述夹持组件包括夹持架,所述夹持架活动安装在固定块底端;
核心计算与控制组件,所述核心计算与控制组件活动安装在十字型安装架顶端中部,所述核心计算与控制组件包括核心计算与控制器,所述核心计算与控制器活动安装在十字型安装架顶端中部。
优选的,所述灯光报警组件还包括第一报警灯、第二报警灯、第三报警灯、第四报警灯、第五报警灯、第六报警灯、第七报警灯和第八报警灯,所述第一报警灯通过螺栓安装在U型安装板顶端左后侧,所述第二报警灯通过螺栓安装在U型安装板顶端左侧中部,所述第三报警灯通过螺栓安装在U型安装板顶端左前侧,所述第四报警灯通过螺栓安装在U型安装板顶端右后侧,所述第五报警灯通过螺栓安装在U型安装板顶端右侧中部,所述第六报警灯通过螺栓安装在U型安装板顶端右前侧,所述第七报警灯通过螺栓安装在U型安装板顶端后侧,所述第八报警灯通过螺栓安装在U型安装板顶端前侧。
优选的,所述全景视角激流数据采集组件还包括第一全景视角激流数据采集器、第二全景视角激流数据采集器、第三全景视角激流数据采集器和第四全景视角激流数据采集器,所述第一全景视角激流数据采集器通过转轴安装在前侧的支撑架顶端,所述第二全景视角激流数据采集器通过转轴安装在左侧的支撑架顶端,所述第三全景视角激流数据采集器通过转轴安装在后侧的支撑架顶端,所述第四全景视角激流数据采集器通过转轴安装在右侧的支撑架顶端。
优选的,所述夹持组件还包括第一安装螺栓、螺纹孔和第二安装螺栓,若干个所述螺纹孔开设在夹持架两端中部,若干个所述第一安装螺栓螺动安装在螺纹孔内部,所述第二安装螺栓螺动安装在夹持架前端顶部。
优选的,所述核心计算与控制组件还包括GPS接收天线,所述GPS接收天线通过螺栓安装在核心计算与控制器顶端后侧,所述GPS接收天线外壁涂抹有防水漆。
优选的,所述核心计算与控制器内壁底端通过螺丝安装有声音报警器、GPS定位器、扩展接口器和核心计算单元,且通过导线连接,并通过全景视觉的激流报警系统进行控制。
优选的,所述核心计算与控制器通过导线与第一报警灯、第二报警灯、第三报警灯、第四报警灯、第五报警灯、第六报警灯、第七报警灯、第八报警灯、第一全景视角激流数据采集器、第二全景视角激流数据采集器、第三全景视角激流数据采集器、第四全景视角激流数据采集器和GPS接收天线连接。
优选的,所述十字型安装架底端前侧通过螺栓安装有L型固定板,所述L型固定板后端通过螺栓安装在支撑杆前端顶部,所述十字型安装架通过螺栓安装有第一L型支撑块,所述第一L型支撑块底端两侧通过螺栓安装有两个第一支撑板,两个所述第一支撑板底端通过螺栓安装在支撑杆前端与后端中上部,所述支撑杆前端与后端中下部通过螺栓安装有第二支撑板,所述第二支撑板底端通过螺栓安装有第二L型支撑块。
优选的,全景视觉的激流报警系统,包括有核心计算与控制装置中的核心控制板,且核心计算与控制装置中的核心控制板中包括目标检测模型,决策与方位报警算法和控制系统,目标检测模型对全景激流视频采装置发送的四路实时画面进行目标检测,计算识别出四路画面中激流目标并标记目标位置和类别,目标识别的灵敏度可通过阈值调节按钮调整,决策与方位报警算法通过综合分析目标坐标、摄像头方位、灵敏度阈值等信息,综合计算得出待报警方位,其中,灵敏度阈值可通过装置使用者调节,硬件层面通过核心计算与控制板上的引脚与信号量采集按钮相连接,四路摄像头将平面划分为八个区域,分别为前侧、后侧、左侧、右侧、左前侧、右前侧、左后侧、右后侧,控制系统通过GPS模块采集航行坐标,通过全景激流视频采装置采集激流画面,核心控制板识别激流,计算激流定位结果数据,并将以上激流画面、激流识别与定位计算结果数据以及GPS数据进行本地存储。
与现有技术相比,本发明的有益效果是:
本发明通过全景视角激流数据采集组件利用四个全景视角激流数据采集器对激流进行全景视频采集,通过设置的核心计算与控制组件,使得该激流识别装置能够对全景视频画面进行激流目标识别,通过设置灯光报警组件和声音报警器,辅助操艇人员对危险水域所在方位进行辨识,提升舟艇操控人员对舟艇四周危险因素的感知能力,从而便于航行人员感知和记录航行过程的危险信息,进而保障激流航行人员的人身安全,降低了激流航行的事故率。
附图说明
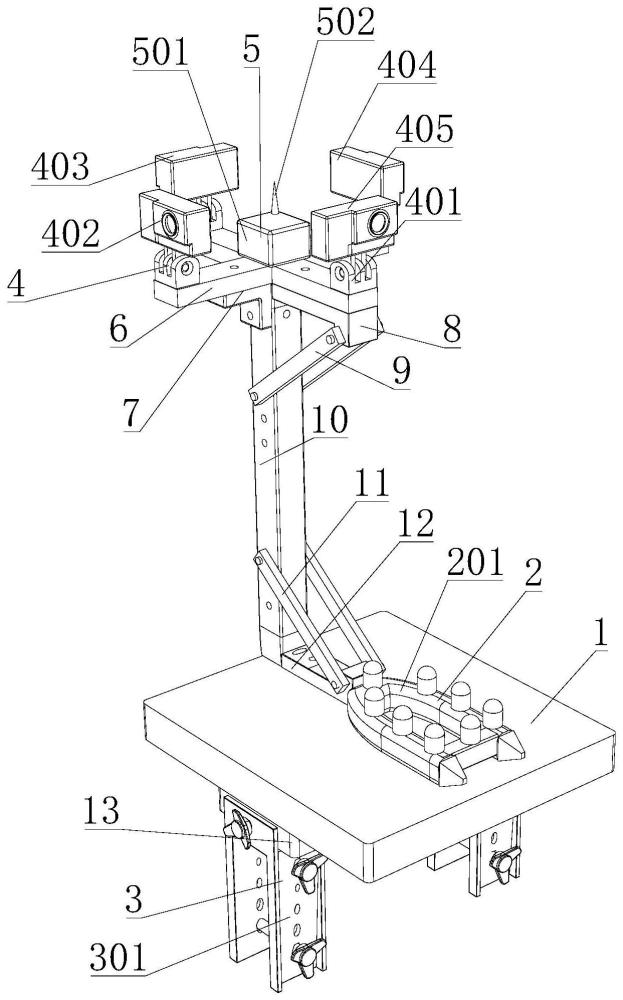
图1为本发明实施例提供整体结构示意图;
图2为本发明实施例提供的灯光报警组件的结构图;
图3为本发明实施例提供的灯光报警组件俯视的结构图;
图4为本发明实施例提供的夹持组件的结构图;
图5为本发明实施例提供的全景视角激流数据采集组件的结构图;
图6为本发明实施例提供的全景视觉的激流报警系统框图。
图中:1、支撑底座;2、灯光报警组件;201、U型安装板;202、第一报警灯;203、第二报警灯;204、第三报警灯;205、第四报警灯;206、第五报警灯;207、第六报警灯;208、第七报警灯;209、第八报警灯;3、夹持组件;301、夹持架;302、第一安装螺栓;303、螺纹孔;304、第二安装螺栓;4、全景视角激流数据采集组件;401、支撑架;402、第一全景视角激流数据采集器;403、第二全景视角激流数据采集器;404、第三全景视角激流数据采集器;405、第四全景视角激流数据采集器;5、核心计算与控制组件;501、核心计算与控制器;502、GPS接收天线;6、十字型安装架;7、L型固定板;8、第一L型支撑块;9、第一支撑板;10、支撑杆;11、第二支撑板;12、第二L型支撑块;13、固定块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,本发明提供一种技术方案:一种基于全景视觉的激流识别与方位报警装置,包括支撑底座1,还包括;
支撑杆10,支撑杆10活动安装在支撑底座1顶端左侧,支撑杆10顶端活动安装有十字型安装架6,支撑底座1底端前侧与后侧活动安装有固定块13;
灯光报警组件2,灯光报警组件2活动安装在支撑底座1顶端右侧,灯光报警组件2包括U型安装板201,U型安装板201活动安装在支撑底座1顶端右侧;
全景视角激流数据采集组件4,全景视角激流数据采集组件4活动安装在十字型安装架6顶端,全景视角激流数据采集组件4包括支撑架401,四个支撑架401活动安装在十字型安装架6顶端四周;
夹持组件3,夹持组件3活动安装在固定块13底端,夹持组件3包括夹持架301,夹持架301活动安装在固定块13底端;
核心计算与控制组件5,核心计算与控制组件5活动安装在十字型安装架6顶端中部,核心计算与控制组件5包括核心计算与控制器501,核心计算与控制器501活动安装在十字型安装架6顶端中部。
灯光报警组件2还包括第一报警灯202、第二报警灯203、第三报警灯204、第四报警灯205、第五报警灯206、第六报警灯207、第七报警灯208和第八报警灯209,第一报警灯202通过螺栓安装在U型安装板201顶端左后侧,第二报警灯203通过螺栓安装在U型安装板201顶端左侧中部,第三报警灯204通过螺栓安装在U型安装板201顶端左前侧,第四报警灯205通过螺栓安装在U型安装板201顶端右后侧,第五报警灯206通过螺栓安装在U型安装板201顶端右侧中部,第六报警灯207通过螺栓安装在U型安装板201顶端右前侧,第七报警灯208通过螺栓安装在U型安装板201顶端后侧,第八报警灯209通过螺栓安装在U型安装板201顶端前侧;
全景视角激流数据采集组件4还包括第一全景视角激流数据采集器402、第二全景视角激流数据采集器403、第三全景视角激流数据采集器404和第四全景视角激流数据采集器405,第一全景视角激流数据采集器402通过转轴安装在前侧的支撑架401顶端,第二全景视角激流数据采集器403通过转轴安装在左侧的支撑架401顶端,第三全景视角激流数据采集器404通过转轴安装在后侧的支撑架401顶端,第四全景视角激流数据采集器405通过转轴安装在右侧的支撑架401顶端;
夹持组件3还包括第一安装螺栓302、螺纹孔303和第二安装螺栓304,若干个螺纹孔303开设在夹持架301两端中部,若干个第一安装螺栓302螺动安装在螺纹孔303内部,第二安装螺栓304螺动安装在夹持架301前端顶部;
核心计算与控制组件5还包括GPS接收天线502,GPS接收天线502通过螺栓安装在核心计算与控制器501顶端后侧,GPS接收天线502外壁涂抹有防水漆;
核心计算与控制器501内壁底端通过螺丝安装有声音报警器、GPS定位器、扩展接口器和核心计算单元,且通过导线连接,并通过全景视觉的激流报警系统进行控制;
核心计算与控制器501通过导线与第一报警灯202、第二报警灯203、第三报警灯204、第四报警灯205、第五报警灯206、第六报警灯207、第七报警灯208、第八报警灯209、第一全景视角激流数据采集器402、第二全景视角激流数据采集器403、第三全景视角激流数据采集器404、第四全景视角激流数据采集器405和GPS接收天线502连接;
十字型安装架6底端前侧通过螺栓安装有L型固定板7,L型固定板7后端通过螺栓安装在支撑杆10前端顶部,十字型安装架6通过螺栓安装有第一L型支撑块8,第一L型支撑块8底端两侧通过螺栓安装有两个第一支撑板9,两个第一支撑板9底端通过螺栓安装在支撑杆10前端与后端中上部,支撑杆10前端与后端中下部通过螺栓安装有第二支撑板11,第二支撑板11底端通过螺栓安装有第二L型支撑块12;
全景视觉的激流报警系统,包括有核心计算与控制装置中的核心控制板,且核心计算与控制装置中的核心控制板中包括目标检测模型,决策与方位报警算法和控制系统,目标检测模型对全景激流视频采装置发送的四路实时画面进行目标检测,计算识别出四路画面中激流目标并标记目标位置和类别,目标识别的灵敏度可通过阈值调节按钮调整,决策与方位报警算法通过综合分析目标坐标、摄像头方位、灵敏度阈值等信息,综合计算得出待报警方位,其中,灵敏度阈值可通过装置使用者调节,硬件层面通过核心计算与控制板上的引脚与信号量采集按钮相连接,四路摄像头将平面划分为八个区域,分别为前侧、后侧、左侧、右侧、左前侧、右前侧、左后侧、右后侧,控制系统通过GPS模块采集航行坐标,通过全景激流视频采装置采集激流画面,核心控制板识别激流,计算激流定位结果数据,并将以上激流画面、激流识别与定位计算结果数据以及GPS数据进行本地存储。
工作原理:本发明通过第一全景视角激流数据采集器402、第二全景视角激流数据采集器403、第三全景视角激流数据采集器404和第四全景视角激流数据采集器405对激流进行全景视频采集,将采集的视频传输至核心计算与控制器501内,通过核心计算与控制器501内预置的识别模型来推理识别激流、礁石、船只和人类目标所在区域的坐标、编号和分类名,并根据目标区域所在方位控制相应的报警灯发出提示光亮,根据激流危险目标数量控制报警扬声器报警音频率。从而便于航行人员感知和记录航行过程的危险信息,并将夹持架301夹持在皮艇上,通过第一安装螺栓302将夹持架301在皮艇上固定。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。