用于稳态车辆声音合成的系统和方法
文献发布时间:2023-06-19 09:29:07
技术领域
一个或多个实施方案涉及一种用于在稳态条件期间合成声音的车辆系统和方法。
背景技术
车辆包括产生噪声的部件,该噪声通常是驾驶员和乘客厢内的任何乘客都能听到的。例如,驾驶员可能听到由车辆的动力传动系统的发动机和排气系统产生的噪声。在新的车辆架构和驾驶模式中,可以减少或消除此类噪声。例如,电动车辆不包括内燃机,并且因此不产生发动机噪音。对于驾驶员来说,缺少发动机噪声可能是不希望的。因此,车辆音频系统可以产生表示在操作车辆时产生的典型或预期噪声的合成噪声。
发明内容
在一个或多个实施方案中,提供一种具有控制器和扬声器的车辆声音合成系统。控制器被编程为接收指示挡位选择、发动机转速和踏板位置中的至少一个的输入。控制器还被编程为生成指示合成的发动机噪声(SEN)的音频信号,并响应于指示第一车辆条件的挡位选择、发动机转速和踏板位置中的至少一个以第一速率衰减音频信号。扬声器适于响应于接收到衰减的音频信号而在车辆的乘客厢内投射声音。
在一个或多个实施方案中,车辆系统设置有控制器,该控制器被配置为生成指示合成的发动机噪声(SEN)的音频信号,并响应于指示第一车辆条件的挡位选择、发动机转速和踏板位置中的至少一个以第一速率衰减音频信号。控制器还被配置为将衰减的音频信号提供给安装在车辆乘客厢内的扬声器。
在一个或多个实施方案中,提供一种体现在非暂时性计算机可读介质中的计算机程序产品,所述计算机程序产品被编程用于合成发动机噪声(SEN)。该计算机程序产品包括用于以下操作的指令:接收指示档位选择、发动机转速和踏板位置中的至少一个的输入;以及产生指示SEN的音频信号。该计算机程序产品还包括用于以下操作的指令:响应于指示第一车辆条件的输入以第一速率衰减音频信号;以及将衰减的音频信号提供给安装在车辆乘客厢内的扬声器。
附图说明
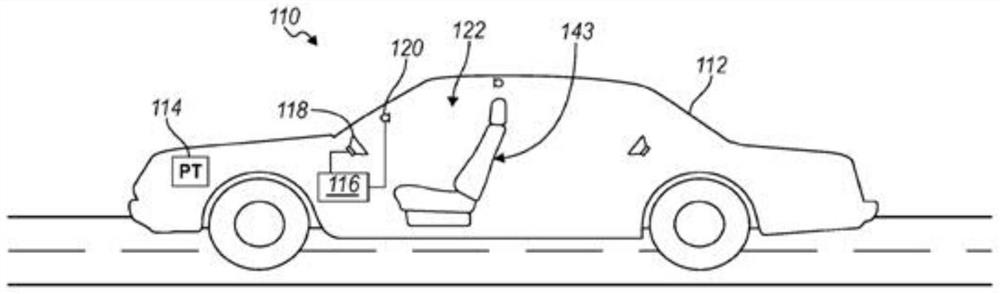
图1是根据一个或多个实施方案的用于在稳态条件期间合成声音的车辆系统的示意图。
图2是图1的车辆系统的示意性框图。
图3是示出根据一个或多个实施方案的用于在与车辆巡航相关联的稳态条件期间合成声音的方法的流程图。
图4是示出由图3的方法所致的图1的车辆系统的各种参数如何随时间变化的曲线图。
图5是示出根据一个或多个实施方案的用于在与发动机怠速相关联的稳态条期间合成声音的方法的流程图。
图6是示出由图5的方法所致的图1的车辆系统的各种参数如何随时间变化的曲线图。
图7是示出根据一个或多个实施方案的用于在与倒挡行驶相关联的稳态条件期间合成声音的方法的流程图。
图8是示出由图7的方法所致的图1的车辆系统的各种参数如何随时间变化的曲线图。
图9是示出根据一个或多个实施方案的用于在与时走时停行驶相关联的稳态条件期间合成声音的方法的流程图。
图10是示出由图9的方法所致的图1的车辆系统的各种参数如何随时间变化的曲线图。
具体实施方式
根据需要在本文公开详细实施方案;然而,将理解,所公开的实施方案仅是示例性的并且可能以各种和替代性形式体现。附图不一定按比例绘制;一些特征可能被放大或最小化以示出特定部件的细节。另外,示出了包含多个步骤的流程图,并且这些步骤可以以交替的顺序执行,并且在一些实施方案中,多个步骤同时发生。因此,本文中所公开的具体结构细节和功能细节不应被解释为是限制性的,而是仅仅作为教导本领域技术人员的表示性基础。
参照图1,示出了根据一个或多个实施方案的用于合成声音的车辆系统,并且该车辆系统总体上由数字110表示。车辆系统110被描绘在车辆112内。车辆112包括动力传动系统114,该动力传动系统可以包括内燃机(ICE)。车辆系统110包括控制器116、至少一个扬声器118以及在某些实施方案中的至少一个麦克风120。
驾驶员可能期望在某些驾驶模式或操纵期间在车辆112的乘客厢122内听到来自动力传动系统114的噪声。在新的车辆架构和驾驶模式中,这种动力传动系统噪声可能被减小或不存在。在当前行驶条件下,控制器116与一个或多个车辆控制器(未示出)通信以监测各种车辆部件和系统,诸如动力传动系统114。控制器116通过提供车辆的行驶动力学(例如,加速、巡航、减速、倒车、起动、停机)的可听反馈来产生有助于驾驶体验的合成的发动机噪声(SEN)信号,该信号被提供给扬声器118和投射为乘客厢122内可听见的音频。此SEN与实际发动机声音组合,以产生驾驶员听得到的总发动机声音。此总发动机声音与乘客厢中的其他声音组合,以形成驾驶员体验的音景。尽管驾驶员可能期望在某些瞬态行驶模式或操纵期间听到来自动力传动系统114的噪声,但驾驶员可能会在稳态行驶条件期间发现此类噪声令人不快或疲劳。因此,控制器116响应于确定车辆是在某些稳态条件下操作而调节或衰减SEN。如本文所使用的SEN术语可以指可听见的空气中声音,以及指被发送到放大器然后到扬声器以变为可听见声音的电信号。
参照图1至图2,控制器116通过有线或无线通信经由一个或多个车辆网络与其他车辆系统和控制器通信。车辆网络可以包括用于通信的多个信道。车辆网络的一个信道可以是串行总线,诸如控制器局域网(CAN)124。车辆网络的信道之一可以包括由电气和电子工程师协会(IEEE)802系列标准定义的以太网网络。车辆网络的附加信道可以包括模块之间的离散连接,并且可以包括功率信号。可以在车辆网络的不同信道上传送不同的信号。例如,视频信号可以在高速信道(例如,以太网)上传送,而控制信号可以在CAN上传送或是离散信号。车辆网络可以包括有助于在模块和控制器之间传送信号和数据的任何硬件和软件部件。
尽管控制器116被示为单个控制器,但是它可以包含多个控制器,或者可以被体现为一个或多个其他控制器内的软件代码。控制器116通常包括任意数量的微处理器、ASIC、IC、存储器(例如,FLASH、ROM、RAM、EPROM和/或EEPROM)和软件代码,以彼此协作以执行一系列操作。根据一个或多个实施方案,控制器116包括存储在存储器内的预定数据或“查找表”。
控制器116包括根据一个或多个实施方案的发动机阶次消除(Engine OrderCancellation,EOC)模块126。EOC模块126消除、减小或掩盖实际的发动机声音。控制器116接收一个或多个麦克风信号(MIC),所述信号表示由乘客厢122内的一个或多个麦克风120测量到的声音。在一个或多个实施方案中,车辆112包括安装在乘客厢122内的不同位置的四个麦克风120,并且控制器116接收四个对应的MIC信号。控制器116还接收表示发动机转速(Ne)和驱动轴转速(Nd)的信号。使用这些信号(MIC和Ne或Nd),EOC模块126产生信号(CANCEL),以取消或减小特定的发动机阶次,如在乘客厢122内特定位置(例如,驾驶员耳朵附近)所感知的。
车辆112包括车辆音频系统,该车辆音频系统包括控制器116、扬声器118和主机单元128。控制器116从主机单元128接收音频信号(AUDIO)。像控制器116一样,主机单元128通常包括任意数量的微处理器、ASIC、IC、存储器(例如,FLASH、ROM、RAM、EPROM和/或EEPROM)和软件代码,以与其他控制器共同作用以执行一系列操作。控制器116包括用于产生合成发动机声音或噪声的SEN模块130。SEN模块130从CAN总线124接收许多引导信号,诸如车辆速度(VS)、发动机扭矩(Te)、发动机转速(Ne)和节气门(THROTTLE)位置。在一个或多个实施方案中,SEN模块130还接收表示加速踏板位置(ACC)、制动踏板位置(BRAKE)和巡航控制(CRUISE)的信号。图2所示出的控制器116接收多个引导信号,但是控制器116的替代实施方案接收更少、替代和/或附加的引导信号。
在一个或多个实施方案中,SEN模块130包括WAV合成块132,该合成块回放从波形(WAV)音频文件产生的并且表示合成发动机声音或合成发动机噪声的经滤波、修改或增强的音频比特流。在一个或多个实施方案中,WAV合成块132生成音频比特流。WAV合成块132还包括用于调制音频比特流的特性的特征,例如,回放速率、依赖于频率的滤波和/或振幅。在一个或多个实施方案中,SEN模块130还包括发动机阶次合成块133,该发动机阶次合成块基于例如发动机阶次频率和在针对发动机转速或车辆速度的查找表中找到的水平来产生发动机阶次信号。
控制器116还包括根据一个或多个实施方案的实时声音合成模块134。实时声音合成模块134接收表示发动机的当前振动声发射的发动机信号(ENG)。ENG信号可以从安装在发动机和/或排放系统附近的压力或振动传感器136获得。在一个实施方案中,实时声音合成模块134将ENG信号处理成单独的发动机阶次,然后可以对发动机阶次进行单独滤波、均衡,然后提供给混合器块138,以与WAV合成块132和发动机阶次合成块133的输出进行组合。在替代实施方案中,可以对ENG信号进行滤波并将其提供给混合器块138以创建期望的实时SEN特性。
SEN模块130包括稳态检测器(SSD)块139,该稳态检测器块接收混合器块138的输出和引导信号中的一个或多个引导信号;然后使用如下面参照图3至图10详细描述的用于在稳态条件期间合成声音的方法来识别稳态条件。SEN模块130还包括用于基于稳态条件的检测来衰减增益的附加增益块(AGB)140。增益使用对数分贝(dB)单位表示。增益1对应于零dB,并表示直通条件,在直通条件中,AGB 140使SEN通过而无需进行修改。大于1的增益(正dB)指放大,小于1的增益(负dB)指减小。
在一个或多个实施方案中,SEN模块130包括定位块142,该定位块从AGB 140接收音频信号并且生成发动机通常相对于扬声器118位于何处的声像。例如,在一个或多个实施方案中,定位块142为SEN生成声像,该声像对应于位于驾驶员座椅143的头枕中的扬声器118前方三到四英尺的位置。
SEN模块130包括混合器144以用于将定位块142的定位的SEN输出与CANCEL和AUDIO信号进行组合。控制器116将(多个)SEN信号提供给一个或多个功率放大器146,该功率放大器进而将放大的SEN信号提供给扬声器118。车辆音频系统110放大并通过车辆扬声器118播放,而为车辆乘员、尤其是车辆驾驶员提供车辆操作状态的实时可听反馈。
使用EOC模块126可以有效地消除或减少麦克风120所测量到的出现在乘客耳朵位置的原始发动机声音,从而使得将原始发动机声音的特性替换为通过扬声器118播放的SEN的特征。即,首先通过使用EOC模块126显著降低乘客耳朵位置处的实际发动机噪声的水平,控制器116降低乘客耳朵位置处的总声压水平,包括SEN的贡献。通常期望在收听者的耳朵位置达到具有期望声波特性的最低总发动机声压水平。
车辆系统110适用于具有不同动力传动系统114的车辆112。在一个或多个实施方案中,车辆112是具有包括四缸内燃机的动力传动系统114的常规车辆。此类四缸发动机自然地表现出发动机输出轴转速的某些发动机阶次,主要是2阶、4阶、6阶和8阶。车辆系统110例如使用发动机阶次合成块133来合成附加发动机阶次:2.5、4.5和6.5发动机阶次,以向发动机的声音特征添加活泼特性。
在另一个实施方案中,车辆112是具有动力传动系统114的自动启停车辆,该动力传动系统包括发动机,发动机被控制以在车辆停止短时间段(例如,在交通灯处)时停止或停机,然后重新启动以提供推进。此启/停技术用于提高燃料效率。在各种实施方案中,当发动机关闭或重新启动时,车辆系统110使用发动机阶次合成模块133和WAV合成模块132的各种组合来产生SEN以去除或掩盖突然的可听转变。
在又一个实施方案中,车辆112是具有动力传动系统114的混合动力电动车辆(HEV),该动力传动系统包括被单独或组合控制以推进车辆的发动机和电动马达。当HEV112以电动模式操作时,即,单独操作电动马达进行推进时,车辆系统110使用SEN模块130产生SEN,以提供驾驶员和车辆乘员可能更习惯的汽油动力发动机的可听发动机声音特征。通过提供车辆行驶动力学(加速、巡航和减速、倒车、起动、停机等)的可听反馈,这种添加的声音有助于驾驶体验。纯电动车辆和在EV模式下操作的HEV具有内部音景,该内部音景主要由车辆悬架噪声、振动和粗糙性(NVH)和电动马达啸叫构成,电动马达啸叫是谐波上稀疏的。由于它的高频性质和缺乏谐波复杂性,因此经常将马达啸叫的声音特征视为不期望的。当然,乘客厢中也存在其他声音。
在其他实施方案中,车辆系统110用完全不同的声音特征代替发动机的可听特性。在这种情况下,车辆系统110使用EOC模块126降低发动机和/或电动马达的可听水平。此EOC模块126降低各个发动机阶次的总水平,并且因此降低乘客厢中车辆乘员位置处的发动机噪声的总水平。然后,可以通过扬声器118播放SEN,并且可以用SEN的声音有效地代替或掩盖乘客耳朵位置处的原始声音。通过首先显著降低乘客耳朵位置处的实际发动机噪声水平,包括乘客耳朵位置处的SEN的贡献在内的总声压水平比不采用EOC系统时的总声压水平低。通常期望在收听者的耳朵位置达到具有期望声波特性的最低总发动机声压水平。
在EV或HEV中,如果车辆在启动时没有任何传统的发动机声音,则驾驶员可能在启动车辆后未收到可听反馈。在这种类型的车辆中,车辆系统110合成类似发动机的声音,即SEN,并通过扬声器118播放它,以提供更传统的发动机启动车辆体验。SEN可以具有任何声波特性,并且不一定要模仿发动机。在一个或多个实施方案中,SEN类似于汽车发动机非典型的声音(例如,飞行器的喷气发动机)。此SEN可以在按下车辆的电源按钮(未示出)时启动,并帮助向驾驶员提供车辆通电的可听反馈。此SEN继续通过扬声器118播放,以向驾驶员提供有关车辆状态的可听反馈,无论是在怠速、加速、减速还是仅巡航时。
如前所述,与EOC系统耦合的SEN生成系统具有用更期望的合成的类似发动机的声音掩盖现有发动机声音和/或增强现有发动机声音以在车辆112的乘客厢122中播放的能力。使用一个或多个参考CAN信号(诸如车速(VS)、节气门(或ACC)、发动机扭矩(Te))对这些系统中大部分的合成的发动机声音进行调谐,以便自然地将这些声音整合到车辆中。合成的发动机声音以某种微妙的水平播放,不应播放太大声以免使车辆乘员烦躁或疲劳。在一些情况下,乘客舱的内部声压水平是质量的度量:安静的乘客舱可能是豪华车辆的标志。
通常,创建SEN的目标是向车辆驾驶员提供车辆当前操作状态的可听反馈形式。通常重要的是,SEN具有短持续时间的相对较高的振幅,以用信号示意车辆操作状态的变化,然后降低SEN的水平,以免使车辆乘员疲劳。例如,对于以电动模式操作的混合动力车辆或对于纯电动车辆,没有发动机怠速声。即,当车轮不转动时,车辆的动力传动系统完全静音。因此,即使变速器处于前进挡而非驻车挡,驾驶员也没有车辆已通电的可听指示。在车辆加速的情况下,车辆驾驶员习惯于发动机噪声的振幅随着车速的增加而增加,这正是ICE的行为。为了用SEN来模仿这种行为,WAV合成块132和发动机阶次合成块133将加速踏板位置(ACC)和发动机扭矩(Te)用作引导信号来增加合成发动机声音的振幅。驾驶员也习惯于发动机阶次的音高随着车辆速度的增加而增加,这也是ICE的行为。为了模仿这种行为,发动机轴转速(Ne)、车轮速度或车速(Vs)用作到SEN模块130的WAV合成块132的引导信号,以调节合成发动机阶次或SEN的音高。在预定时间段之后,通过根据用于在稳态条件期间合成声音的方法来控制AGB 140来降低SEN水平,从而不会使车辆乘员疲劳。
参照图3至图12,车辆系统110包括用于在稳态条件期间合成声音的一种或多种算法或方法。根据一个或多个实施方案,使用包含在控制器116(图2中示出)内的软件代码来实现所述方法。尽管使用以多个顺序步骤示出的流程图描述了方法,但是在一个或多个其他实施方案中,一个或多个步骤可以省略和/或以另一种方式执行。
简化的SEN策略(未示出)可以生成振幅与发动机特性(诸如发动机扭矩、节气门和/或加速踏板位置)成比例的SEN。但是,此类策略可能导致SEN在很长一段时间内是不期望的或使驾驶员疲劳。例如,在陡坡向上行驶和以高速公路速度牵引拖车会导致高发动机扭矩条件持续长时间段。在此类稳态条件期间,由此类SEN策略产生的SEN的高水平可能是不期望的,因为它可能在一段时间内使收听者疲劳。
参照图3,示出了根据一个或多个实施方案的用于在与车辆巡航相关联的稳态条件期间合成声音的方法,并且该方法总体上由数字300表示。通常,该方法向SEN生成算法添加时间依赖性,以在稳态车辆巡航条件期间逐渐降低SEN。
在步骤310处,控制器116接收指示挡位选择(PRNDL)和发动机转速(Ne)的输入。然后在步骤312至314处,控制器116评估输入以确定是否满足与车辆巡航相关联的稳态条件。在步骤312处,控制器116评估行驶选择以确定是否选择DRIVE(即前进挡)。如果选择DRIVE,则控制器进行到步骤314。在步骤314处,控制器116评估发动机转速(Ne)以确定Ne是否在阈值范围(THRESHOLD)内持续预定时间段(t)。在一个或多个实施方案中,可以利用缓冲器使用滚动平均值来计算平均速度值(Navg)。在另一个实施方案中,平均速度值可以是预定值,例如2500rpm。在一个或多个实施方案中,阈值范围可以是平均速度值的百分比(例如,+/-4%)。如果满足稳态条件,即,在步骤312和314处为肯定确定,则控制器116进行到步骤316。在其他实施方案中,在步骤310处控制器116接收指示车速(VS)和/或驱动轴转速(Nd)的输入;然后在步骤314处将VS或Nd与阈值范围进行比较。在替代实施方案中,省略了行驶选择步骤312,并且控制器116直接从步骤310进行到步骤314。在其他实施方案中,在步骤310处控制器116接收附加和/或替代输入。
在步骤316处,控制器116评估附加增益块(AGB)140的当前增益设置(GAIN),以确定当前是否将GAIN设置为最大目标值(TARGET)。TARGET对应于SEN的最大减小,单位为分贝(dB)。在一个或多个实施方案中,TARGET可以等于-6dB,这意味着该方法将在相似的行驶条件期间将SEN降低到比预期的发动机噪声低至多6dB。如果GAIN等于TARGET,则控制器116返回到步骤310。否则,控制器进行到步骤318,并以预定的减小速率或降低速率(RATE 1)降低GAIN。根据一个或多个实施方案,RATE 1可以等于每秒-0.5dB和-0.33dB之间的值(即,1dB每2至3s)。在一个或多个实施方案中,THRESHOLD可以等于滚动平均值的+4%;预定时间(t)可以是20秒;RATE 1可以为-0.4dB/s(即1dB每2.5s);并且TARGET可以是-6dB。其他实施方案包括不同的检测持续时间(预定时间)、RPM容限(THRESHOLD)、减小速率(RATE 1)以及总减小量(TARGET)。在步骤318之后,控制器116返回到步骤310。使用这种方法,控制器116在稳态巡航条件期间逐渐减小SEN。
图4是示出用于在稳态车辆巡航条件期间合成声音的方法300的影响的示例的曲线图400。曲线图400包括表示发动机转速(Ne)、AGB 140的可调节增益(GAIN)、挡位选择(PRNDL)和车速(Vs)的四个曲线。挡位选择被设置为前进挡(D)达曲线图400所示的时间段。在时间T1处,发动机转速(Ne)降低到阈值范围(THRESHOLD)内,并且Ne保持在THRESHOLD内达预定时间(t)。在时间T2处,如步骤312和314所述,控制器116确定两个稳态巡航条件都被满足,即,选择了DRIVE挡,并且Ne在THRESHOLD范围内持续预定时间(t),因此如附图标记410所描绘的,开始以RATE 1减小GAIN。在时间T3处,控制器116确定GAIN等于-6dB的TARGET,然后停止降低GAIN,如参照步骤316所述。
返回参照图3,当不再满足稳态巡航条件时,即,在步骤312或步骤314处做出否定确定时,控制器进行到步骤320。在步骤320处,控制器116评估附加增益块(AGB)140的当前增益设置(GAIN),以确定当前是否将GAIN设置为中性值(NEUTRAL)。NEUTRAL值可以等于0dB,这对应于没有增益。如果GAIN不等于中性,则控制器进行到步骤322并且以预定的增加速率(RATE 2)增加RATE。根据一个或多个实施方案,RATE 2可以等于每秒4dB和6dB之间的值。在一个或多个实施方案中,RATE 2可以等于6dB/s。RATE 2的绝对值可以大于RATE 1的绝对值,以使SEN在瞬态或非稳态条件期间迅速斜升到预期的SEN水平。一旦控制器116确定GAIN等于MIN,即在步骤320处为肯定确定,则控制器116返回到步骤310。
参照图4,在时间T3和T4之间,满足步骤312和314的稳态条件,并且控制器116将GAIN保持为TARGET值(-6dB)。在时间T4之后,发动机转速(Ne)超过THRESHOLD,并且控制器116以RATE 2增加GAIN,如数字412所描绘的。在时间T5处,控制器116确定GAIN等于0dB的MIN值,然后停止增加GAIN,如参照步骤320所述。
在方法300的另一个实施方案中,在步骤310处,控制器116还接收巡航控制(CRUISE)信号,该信号表示巡航被启用还是禁用。在步骤310之后,控制器116进行到步骤324并评估CRUISE以确定是否启用巡航。此条件可以是附加条件,或者是DRIVE条件(即,步骤312)的挡位选择的替代条件。即使在平坦路面上,巡航控制也不能使车辆保持为恒定的速度或RPM。巡航控制通常在平坦路面上将发动机RPM和车速保持在2%或3%之内。典型值可能是2500+/-50RPM或60+/-1.5mph。类似地,操作车辆的人通常也将无法将车辆保持为精确恒定的速度或RPM,平坦路面上的典型值的变化稍微更大,为+/-5%或稍微更高。在另一个实施方案中,步骤312和314被省略,并且控制器116在确定巡航控制被启用达预定时间段之后从步骤324进行到步骤316。
参照图5,示出了根据一个或多个实施方案的用于在与发动机怠速相关联的稳态条件期间合成声音的方法,并且该方法总体上由数字500表示。通常,该方法向SEN生成算法添加时间依赖性,以在稳态发动机怠速条件期间逐渐减小SEN。
在步骤510处,控制器116接收指示挡位选择(PRNDL)、发动机转速(Ne)、加速踏板位置(ACC)和制动踏板位置(BRAKE)的输入。然后在步骤512至514,控制器116评估输入以确定是否满足与发动机怠速条件相关联的稳态条件。在其他实施方案中,在步骤510处控制器116接收附加和/或替代输入。
在步骤512处,控制器116评估行驶选择,以确定是否选择PARK。如果选择PARK,则控制器进行到步骤514。在步骤514处,控制器116评估发动机转速(Ne)以确定Ne是否在阈值范围内持续预定时间段(t)。在一个或多个实施方案中,平均速度值(Navg)可以是预定值,例如0rpm,其指示发动机关闭。在另一个实施方案中,可以利用缓冲器使用滚动平均值来计算平均速度值。在一个或多个实施方案中,阈值范围可以是平均速度值的百分比(例如,+/-4%)。如果满足稳态条件,即在步骤512和514处为肯定确定,则控制器116进行到步骤516。在替代实施方案中,省略步骤514,并且在PARK被选择达长于预定时间(t)之后控制器116从步骤512进行到步骤516。
在步骤516处,控制器116评估附加增益块(AGB)140的当前增益设置(GAIN),以确定当前是否将GAIN设置为最大目标值(TARGET)。TARGET对应于SEN的最大减小,单位为分贝(dB)。在一个或多个实施方案中,TARGET可以等于-6dB,这意味着该方法将在相似的行驶条件期间将SEN降低到比预期的发动机噪声低至多6dB。如果GAIN等于TARGET,则控制器116返回到步骤510。否则,控制器进行到步骤518,并以预定的减小速率或降低速率(RATE 1)降低GAIN。根据一个或多个实施方案,RATE 1可以等于每秒-0.5dB和-0.33dB之间的值(即,1dB每2至3s)。在一个或多个实施方案中,THRESHOLD可以等于滚动平均值的+4%;预定时间(t)可以是20秒;RATE 1可以为-0.4dB/s(即1dB每2.5s);并且TARGET可以是-6dB。其他实施方案包括不同的检测持续时间(预定时间)、RPM容限(THRESHOLD)、减小速率(RATE 1)以及总减小量(TARGET)。在步骤518之后,控制器116返回到步骤510。使用这种方法,控制器116在稳态发动机怠速条件期间逐渐减小SEN。
在一个或多个实施方案中,方法500在HEV中实现。在典型的HEV中,当按下电源按钮时,车辆通电,但由于发动机未运转,因此没有传统的可听指示,诸如发动机启动和运行的声音。方法500以相对高水平实现此发动机怠速声音播放达短持续时间,以向驾驶员和乘客指示已经发生状态改变(车辆现在处于启动状态)。然后,此合成的怠速声音的振幅可以以每2.5秒1dB降低,也就是合成发动机振幅每15秒减小6dB。在其他实施方案中,此合成怠速声音的振幅可以在合成发动机振幅中每10秒降低6dB。方法500也适用于具有SEN系统的常规(非混合动力)车辆。
图6是示出用于在稳态发动机怠速条件期间合成声音的方法500的影响的示例的曲线图600。曲线图600包括表示发动机转速(Ne)、AGB 140的可调节增益(GAIN)、挡位选择(PRNDL)、加速踏板位置(ACC)、制动踏板位置(BRAKE)和车速(Vs)的曲线。
在时间T0处,将挡位选择设置为驻车挡(P),并且发动机转速(Ne)为零rpm,这在THRESHOLD区域内。Ne在THRESHOLD内保持达时间段(t)。在时间T1处,控制器116确定满足两个稳态发动机怠速条件,如步骤512和514中所述,即,选择PARK挡,并且Ne在THRESHOLD范围内持续预定时间(t),并因此开始以RATE 1减小GAIN,如附图标记610所描绘的。在时间T2处,控制器116确定GAIN等于-6dB的TARGET,然后停止降低GAIN,如参照步骤516所述。
当不再满足稳态发动机怠速条件时,即,在步骤512或步骤514做出否定确定,控制器进行到步骤520。在步骤520处,控制器116评估附加增益块(AGB)140的当前增益设置(GAIN),以确定当前是否将GAIN设置为中性值(NEUTRAL)。NEUTRAL值可以等于0dB,这对应于没有增益。如果GAIN不等于NEUTRAL,则控制器进行到步骤522并且以预定的增加速率(RATE 2)增加RATE。根据一个或多个实施方案,RATE 2可以等于每秒4dB和6dB之间的值。在一个或多个实施方案中,RATE 2可以等于6dB/s。RATE 2的绝对值可以大于RATE 1的绝对值,以使SEN在瞬态或非稳态条件期间迅速斜升到预期的SEN水平。一旦控制器116确定GAIN等于MIN,即在步骤520为肯定确定,则控制器116返回到步骤510。
参照图6,在时间T3处,挡位选择从驻车挡(P)切换到前进挡(D)。在时间T3之后,控制器116确定不再满足发动机怠速条件,即,在步骤512为否定确定,并以RATE 2增加GAIN,如数字612所描绘的。在时间T4处,控制器116确定GAIN等于0dB的MIN值,然后停止增加GAIN,如参照步骤520所述。
参照图5,在方法500的另一个实施方案中,控制器116在车辆运动时评估发动机怠速条件。在HEV中,发动机在再生制动条件期间通常关闭或怠速,在再生制动条件下,一个或多个电动马达被控制以作为发电机操作,以在车辆制动或减速时为高电压电池充电。
如前所述,在步骤512处,控制器116评估行驶选择以确定是否选择PARK。在此实施方案中,如果未选择PARK,则控制器进行到步骤524以确定是否选择前进挡(DRIVE)。如果选择DRIVE,则控制器116进行到步骤526以评估制动踏板位置(BRAKE)和加速踏板位置(ACC)信号。如果控制器116确定施加BRAKE,或者释放ACC;则控制器116进行到步骤514。如前所述,在步骤514处,控制器116评估发动机转速(Ne)以确定Ne是否在约平均速度值(Navg)的阈值范围内持续预定时间段(t)。如果满足稳态条件,即,在步骤524、526和514处为肯定确定,则控制器116进行到步骤516和518,以开始以减小速率(RATE 1)降低GAIN。如果控制器116确定挡位选择既不是PARK(步骤512)也不是DRIVE(步骤524),则其进行到步骤528。在一个或多个实施方案中,如果挡位选择是REVERSE,则控制器116进行到参照图7描述的方法700。然而,如果控制器116确定挡位选择不是DRIVE、PARK或REVERSE,即在步骤528为否定确定,则其可以前进至参照图9描述的方法900。
参照图6,控制器116在时间T4和T5之间将GAIN保持为中性值(即0dB)。在时间T5处,驾驶员释放加速踏板,并且ACC降低,并且发动机转速Ne逐渐降低至零RPM。在时间T7处,控制器116确定满足稳态发动机怠速条件,如步骤524、526和514中所述,即,选择DRIVE挡,施加BRAKE,释放加速踏板(ACC=0),并且Ne在THRESHOLD范围内持续预定时间(t)。在时间T7之后,控制器116开始以RATE 1减小GAIN,如附图标记614所描绘的。
参照图7,示出了根据一个或多个实施方案的用于在与倒挡行驶相关联的稳态条件期间合成声音的方法,并且该方法总体上由数字700表示。通常,一些车辆在车辆以倒挡行驶时在乘客厢内播放可能使一些驾驶员疲劳的重复蜂鸣声。方法700添加依赖时间的SEN生成算法,以在稳态倒挡行驶条件期间逐渐减小SEN。
在步骤710处,控制器116接收指示挡位选择(PRNDL)的输入。在步骤712处,控制器116评估行驶选择以确定REVERSE是否被选择达预定时间段(t)。如果满足这些条件,则控制器进行到步骤716。在其他实施方案中,在步骤710处控制器116接收附加和/或替代输入。
在步骤716处,控制器116评估附加增益块(AGB)140的当前增益设置(GAIN)以确定当前是否将GAIN设置为最大目标值(TARGET)。TARGET对应于SEN的最大减小,单位为分贝(dB)。在一个或多个实施方案中,TARGET可以等于-10dB,这意味着该方法将在类似行驶条件期间将SEN减小到比预期的发动机噪声低至多10dB。如果GAIN等于TARGET,则控制器116返回到步骤710。否则,控制器进行到步骤718,并以预定的减小速率或降低速率(RATE 1)降低GAIN。在一个或多个实施方案中,预定时间(t)可以是5秒;RATE 1可以为-0.8dB/s(即2dB每2.5s);并且TARGET可以是-10dB。其他实施方案包括不同的检测持续时间(预定时间)、减小速率(RATE 1)和总减小量(TARGET)。在步骤718之后,控制器116返回到步骤710。使用这种方法,控制器116在稳态巡航条件期间逐渐减小SEN。在一个或多个实施方案中,控制器116以多个离散步骤而不是以一定速率来减小GAIN。可以应用这些增益减小,使得每个警报蜂鸣在蜂鸣持续时间期间以恒定的水平播放,并且每个随后的蜂鸣更安静,直到满足TARGET为止。
图8是示出用于在稳态倒挡行驶条件期间合成声音的方法700的影响的示例的曲线图800。曲线图800包括表示挡位选择(PRNDL)和AGB 140的可调节增益(GAIN)的曲线。在时间T0处,选择REVERSE挡。
在时间T2处,如步骤712所述,控制器116确定满足稳态倒挡行驶条件,即,REVERSE挡被选择达预定时间(t),因此开始以RATE 1减小GAIN,如附图标记810所描绘的。在时间T2处,控制器116确定GAIN等于-10dB的TARGET,然后停止降低GAIN,如参照步骤716所述。
返回参照图7,当不再满足稳态巡航条件时,即,在步骤712处做出否定确定时,控制器进行到步骤720。在步骤720处,控制器116评估GAIN以确定当前是否将其设置为中性值(NEUTRAL)。在一个或多个实施方案中,NEUTRAL可以等于0dB,其对应于没有增益。如果GAIN不等于NEUTRAL,则控制器进行到步骤722,并以预定的增加速率(RATE 2)增加RATE。根据一个或多个实施方案,RATE 2可以等于每秒4dB和6dB之间的值。一旦控制器116确定GAIN等于MIN,即在步骤720为肯定确定,则控制器116返回到步骤710。其他实施方案包括不同的检测持续时间(预定时间)、速率(RATE 2)和中性值(NEUTRAL)。
参照图8,在时间T2和T3之间,满足步骤712的稳态条件,并且控制器116将GAIN保持为TARGET值(-10dB)。在时间T3之后,挡位选择更改为DRIVE,并且控制器116以RATE 2增加GAIN,如数字812所描绘的。在时间T4处,控制器116确定GAIN等于0dB的MIN值,然后停止增加GAIN,如参照步骤720所述。
参照图9,示出了根据一个或多个实施方案的用于在与时走时停交通期间重复的加速和减速相关联的稳态条件期间合成声音的方法,并且该方法总体上由数字900表示。通常,该方法向SEN生成算法添加时间依赖性,以在稳态时走时停条件期间逐渐减小SEN。
在步骤910处,控制器116接收指示加速踏板位置(ACC)和制动踏板位置(BRAKE)的输入。然后在步骤912处,控制器116评估输入以确定是否发生了时走时停事件。在一个或多个实施方案中,时走时停事件发生在以下时间:驾驶员应用制动踏板超过预定制动踏板行程位置(b);然后应用加速踏板超过预定的加速踏板行程位置(a);然后再次应用制动踏板超过b。在一个或多个实施方案中,a和b等于踏板行程的预定百分比,例如50%。如果满足时走时停条件,即1)BRAKE>b;然后2)ACC>a;然后3)BRAKE>b;则控制器116进行到步骤914并递增计数器。在其他实施方案中,在步骤910处控制器116接收附加和/或替代输入。
在步骤916,控制器116评估当前时走时停事件与先前的时走时停事件之间的时间流逝或“GAP”。如果GAP不大于预定时间(t),则控制器116进行到步骤918以与计数阈值(THRESHOLD)相比评估计数器的当前设置(COUNT)。在一个或多个实施方案中,预定时间(t)可以等于两分钟,并且THRESHOLD可以等于二。如果控制器116确定COUNT大于预定计数阈值(COUNT>THRESHOLD),则控制器116确定满足稳态时走时停条件,并且进行到步骤920。
在步骤920处,控制器116评估附加增益块(AGB)140的当前增益设置(GAIN),以确定当前是否将GAIN设置为最大目标值(TARGET)。TARGET对应于SEN的最大减小,单位为分贝(dB)。在一个或多个实施方案中,TARGET可以等于-6dB,这意味着该方法将在相似的行驶条件期间将SEN降低到比预期的发动机噪声低至多6dB。如果GAIN等于TARGET,则控制器116返回到步骤910。否则,控制器进行到步骤922,并以预定的减小速率或降低速率(RATE 1)降低GAIN。根据一个或多个实施方案,RATE 1可以等于每秒-0.5dB和-0.33dB之间的值(即,1dB每2至3s)。其他实施方案包括不同的持续时间(GAP)、计数阈值(THRESHOLD)、目标值(TARGET)和减小速率(RATE 1)。
图10是示出用于在稳态时走时停条件期间合成声音的方法900的影响的示例的曲线图1000。曲线图1000包括表示制动踏板位置(BRAKE)、加速踏板位置(ACC)、当前计数器设置(COUNT)以及AGB 140(GAIN)的可调节增益的曲线。
在时间T1处,驾驶员应用制动踏板(BRAKE)。在时间T1和T2之间,驾驶员释放制动踏板(BRAKE)、应用加速踏板(ACC),然后再次应用制动踏板(BRAKE)。在时间T2处,控制器116根据步骤912确定已经发生了时走时停事件,然后递增COUNT。其他时走时停事件在时间T3和T4处完成。在时间T4处,控制器116确定COUNT超过计数THRESHOLD,并开始以RATE 1减小GAIN,如附图标记1010所描绘的。在时间T5处,控制器116确定GAIN等于-6dB的TARGET,然后停止降低GAIN,如参照步骤920所述。
再次参照图9,响应于步骤916处为否定确定,即,控制器116确定时走时停事件与先前的时走时停事件之间的时间流逝或“GAP”超过预定时间(t),控制器116进行到步骤924,并将计数器设置(COUNT)重置为零。当不再满足稳态时走时停条件时,即在步骤912处做出了否定确定或在步骤924进行重置后,控制器进行到步骤926。在步骤926处,控制器116评估附加增益块(AGB)140的当前增益设置(GAIN),以确定当前是否将GAIN设置为中性值(NEUTRAL)。NEUTRAL值可以等于0dB,这对应于没有增益。如果GAIN不等于MIN,则控制器进行到步骤928,并以预定的增加速率(RATE 2)增加RATE。一旦控制器116确定GAIN等于MIN,即在步骤928处为肯定确定,则控制器116返回到步骤910。
参照图10,在时间T6之后,控制器116确定自上次时走时停事件以来经过的时间(GAP)已经超过预定时间(t),即在步骤916处为肯定确定。然后,控制器116重置COUNT,如数字1012所描绘的;并以RATE 2增加GAIN,如数字1014所描绘的,这对应于步骤924和926。
控制器116使用方法900通过监测加速踏板位置和制动踏板位置循环来检测在一定时间间隔期间从某个最小速度到某个最大速度的重复加速和减速事件的数量。驾驶员很可能不会从这种重复的时走时停事件中获得驾驶乐趣,因此期望的系统行为可能是减小SEN增益。控制器116逐渐地(即,通过降低速率(RATE 1)和通过增加速率(RATE 2))调节GAIN。通常,这些调节以不同的速率发生,即,降低速率应主要以微妙和渐进的方式发生,但是由于状态变化很快就会发生,因此速率增加通常需要快速发生。
尽管在上述实施方案中,在特定增益调节块(即,AGB 140)中调节了SEN的增益,但是应当理解,可以在其他块中调节SEN的增益。此外,可以采用其他替代的数字或模拟信号处理方法来调节SEN的水平。例如,可以使用高频或低频架,可以使用各种模拟、FIR或IIR滤波器,它们可以从SEN的特定频带去除能量以减小其在车辆中的感知水平。可以采用任何前述方法或本领域技术人员已知的其他方法的任何一种或组合,以减小SEN的声压水平、响度或感知响度。
在以上和图2中的实施方案中,描述了SEN合成的多种方法。可以实现替代方法和使用替代信号处理块的替代方法。当检测到稳态条件时,减小SEN的水平的公开方法可以与这些替代方法一起使用。
虽然在上文描述了示范性实施方案,但是并不意图这些实施方案描述所有可能的形式。相反,本说明书中使用的词语是描述词语,而不是限制词语,并且应理解在不脱离本公开的精神和范围的情况下可以做出各种变化。另外,可对各种实现的实施方案的特征进行组合以形成其他实施方案。
- 用于稳态车辆声音合成的系统和方法
- 用于自适应量级车辆声音合成的系统和方法