将乘客登机桥从飞机自动分离的方法
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及一种将乘客登机桥从飞机自动分离的方法。
背景技术
常规的乘客登机桥是手动对接和分离的。这意味着操作员控制乘客登机桥的移动,例如通过操纵杆给出驾驶命令。在此,操作员直接影响驱动设备的速度和方向。
该常规方法占用了昂贵的人工。因此,需要降低成本。
CA 2 418 523 C公开了一种方法,其中分离过程是部分自动化的。本发明的目的是改进这种方法。
发明内容
本发明包括一种用于将乘客登机桥从飞机自动分离的方法;在从属权利要求和说明书中公开了实施例。
在本发明的方法中,飞机具有机身和机门。乘客登机桥初始位于对接位置,其中,乘客登机桥的桥头与机门对准,使得乘客可以经由桥头进入或离开飞机。该方法包括以下步骤:检测开始信号以开始分离过程;确认安全状况,自动将乘客登机桥从对接位置移动到停放位置。
在这种情况下,自动是指移动由计算机控制,其中,特别是移动的速度和方向由计算机而不是操作员控制。操作员通常可以通过提供开始信号或通过按压紧急停止按钮来开始或停止移动。但是执行移动的方式是由计算机限定的。通过也使分离过程自动化,无需等待有资质的操作员来开始分离;相反,该操作可以由无资质进行手动分离的操作员来开始,或者可以从远程位置开始该操作。两种可能均导致在规划机场的日常事务时具有更大的灵活性,并且因此降低了成本。
在实施例中,基于开始位置和停放位置的坐标来建立、特别是计算轨迹,其中,该轨迹限定乘客登机桥的移动。随后,乘客登机桥沿着所建立的轨迹从开始位置移动到停放位置。特别地,该轨迹包括路径。该路径可以包括乘客登机桥的某个部件在移动期间将要经过的多个点坐标。该部件可以是驱动单元。另外,轨迹可以包括分配给路径的定向,该定向在移动期间限定桥头的方向。
在自动分离期间减少损坏机身的风险是有利的。因此,本发明提出以下实施例。
在实施例中,以如下方式控制乘客登机桥的移动、特别是以如下方式建立轨迹:只要桥头仍然位于距飞机的安全距离以内,桥头的移动方向就垂直于机身方向。这特别是意味着,桥头沿与机门的区域中的机身正交的方向执行远离机身的移动。
在实施例中,以如下方式控制乘客登机桥的移动、特别是以如下方式建立轨迹:当在俯视图中观察时,只要桥头仍然位于距飞机的预定安全距离以内,桥头的接近边缘就平行于飞机机身对准,特别是桥头的定向垂直于飞机的机身。
在实施例中,在移动的第一阶段中以如下方式控制桥头:只要接近边缘仍然位于距飞机的预定安全距离以内,就连续地重新调整桥头的方向和隧道的方向的定向方向,使得接近边缘的定向保持平行于机身方向。由于隧道方向T在移动期间可能改变,因此可能需要重新调整。
在实施例中,以如下方式控制桥头:只要桥头仍然位于距飞机的预定安全距离以内,桥头的接近边缘的高度在移动期间就不改变。由于常规的飞机机身具有弯曲的横截面,因此特别是抬升和/或降低的桥头可能导致桥头与机身之间的碰撞,这在分离期间应当防止。
安全距离可以为至少0.5m。所以对于例如0.5m的第一移动,平行对准和/或高度将不会改变。距飞机的距离应当理解为等同于距机身的距离。
在实施例中,该方法包括以下步骤:在完成分离之前分析下一对接情况的信息;根据所分析的下一对接情况确定停放位置;将乘客登机桥移动到所确定的停放位置。特别地,下一对接情况包括有关下一架飞机到达登机口的信息和/或对多个中心线中将要停放该飞机的一者的指定。特别地,下一对接情况的信息由数据库提供。确定所确定的停放位置的步骤可以包括从多个预定的停放位置中选择一个停放位置的步骤。
特别地,前述步骤对于MARS(多停机坪坡道系统)停机场是有利的,在MARS停机场中,飞机可以以各种定向停放。MARS停机场可以包含超过一条的中心线。在此,下一对接情况的信息包括有关在当前飞机分离并且已经离开停机场之后正在接近该停机场的飞机类型的信息。
特别地,停机场具有多个停止位置和/或多条中心线。对于相应多个中的停止位置和/或中心线中的每一个,分配下一停放位置。因此,在分离期间,PBB移动到分配给将要停放飞机的下一停止位置的下一停放位置。
这里的想法是,已经在分离期间将乘客登机桥带到选择的停放位置,这对于随后的对接过程是有利的。这可以为下一对接过程节省时间,从而使飞机的处理时间能够完全缩短。
在实施例中,特别是在接近边缘已经到达距飞机的安全距离之后,为了到达停放位置,隧道沿着第一转动方向执行转动,并且桥头沿着与第一转动方向相反的第二转动方向执行转动。尽管不能通过该步骤获得有关下一对接情况的其他信息,但增加了下一架飞机的机门将尽可能早地进入相机视场的可能性。因此,可以改善下一对接过程。
在实施例中,使用多个观测相机来观测乘客登机桥的安全区域的图像。观测到的图像在操作员站呈现给操作员。然后,操作员在操作员站特别是通过按压失能开关来发出使能信号。在该实施例中,特别是关于开始分离移动的最后决定取决于作为人的操作员。来自相机的图像可以用作该决定启动移动的基础。
在实施例中,在移动期间正在进行观测过程。在此,观测过程配置为在乘客登机桥的安全区域内特别是通过图片识别或通过运动检测器来检测乘客登机桥的安全区域内的物体。观测过程在检测到进入安全区域的物体时发出警告信号,特别是停止信号。
在实施例中,在移动期间正在进行观测过程。在此,观测过程配置为特别是通过使用接近传感器来检测特别是无意地接近安全区域的物体。观测过程在检测到无意地接近的物体时发出警告信号,特别是停止信号。
可以通过将安全区域的实际图像与所存储的没有任何物体的图像进行比较来执行图片识别的观测。如果在实际图像中可以检测到任何差异,则可能是由位于安全区域内的物体引起的。
用于自动对接的相机也可以是观测相机。安全区域可以是乘客登机区和/或驱动设备周围的净空区内的安全区;后者可以由轨迹周围的安全距离形成。在实施例中,安全区域可以包括飞机发动机周围的区域和/或飞机皮托管周围的区域。在实施例中,安全区域可以包括应当没有障碍物或人员的停机坪区域。
该安全区域可以是受乘客登机桥影响的区域内的任何空间,其中,该安全区内的任何事件均可能造成损坏登机桥或接近该区的人员受伤的风险。在实施例中,在移动期间,监视桥头与机身之间的距离,并且如果所述距离没有增加,则停止移动。该步骤用作附加的安全特征。例如,如果距离没有增加,则驱动设备可能存在错误定向。否则,例如,如果定向传感器发送了错误的值,则不会注意到这种情况,直到桥头无意地移动到错误方向而导致机身损坏。
在实施例中,安全区域还包含根据所建立的轨迹的乘客登机桥的未来位置。在此,该轨迹可以用来评估物体是否位于存在与乘客登机桥发生碰撞的风险的位置。可以忽略没有碰撞风险的任何物体。
在实施例中,在移动之前,检测驱动器的方向相对于隧道的方向之间的角度,并且如果所述角度在预定范围之外,则禁止驱动器的移动。该步骤改善了防止损坏机身的安全性,因为可以防止沿不希望的方向、特别是平行于机身的方向驱动桥头。
在实施例中,在移动之前,将驱动器的方向与关于机身已知关系、特别是垂直于机身的方向比较直至预定的临界值。如果比较结果值超过临界值,则禁止驱动器的移动。同样,在此也可以防止由于错误的驱动方向而损坏机身的风险。
附图说明
借助于附图更详细地解释本发明;本文示出:
图1是位于对接位置的PBB的俯视图;
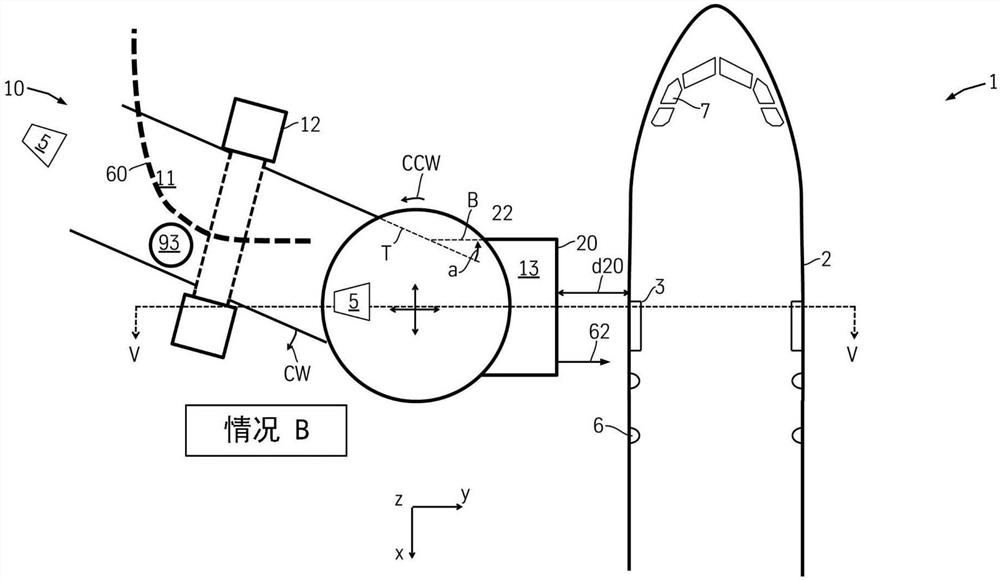
图2是位于中间位置的PBB的俯视图;
图3是根据第一实施例的位于停放位置的PBB的俯视图;
图4是根据第二实施例的位于停放位置的PBB的俯视图;
图5是沿着剖面线V-V穿过图示的剖面图;
图6是自动分离过程的第一阶段的变型的俯视图;
图7是限定乘客登机桥的移动的轨迹;
图8是坐标系的定义;
图9是MARS停机场中不同停放位置的乘客登机桥的俯视图;
图10是乘客登机桥的桥头的底板和减震器的俯视图。
图11在MARS停机场的不同的下一对接情况。
具体实施方式
在本申请的范围内,定义了与对接过程相关的坐标系(图8)。其中,方向x指示在待对接的机门3的区域中平行于机身2的方向F的纵向方向。方向y指示在机门区域中垂直于机身的方向F的横向方向。图8a与图8b之间的差异指示,x方向和y方向可能与飞机坐标系略有不同,特别是在机门3位于飞机机头处的情况下(图8b)。方向z指示高度方向。
如图1所示,PBB 10通常包括隧道11,该隧道在第一端以常规方式连接到机场建(未显示)。PBB 10在第二端上包括桥头13,该桥头将要与飞机机门3对准,使得乘客可以经由机门3和隧道11在方向21上离开飞机1到达机场航站楼,反之亦然。
设置了常规的驱动设备12,以通过调适隧道11的长度和定向来调整桥头13的位置。因此,驱动单元可以移动,这对桥头的位置具有影响。根据车轮的定向,驱动单元12具有驱动方向D。为了改变驱动方向,可以转动驱动单元。特别地,驱动单元在移动之前转动,以在开始移动之前改变初始驱动方向。对驱动器12的方向D的定义从图1和图6中的图示中变得清楚。为了改变隧道11的定向和长度并且因此改变桥头13的位置,可以通过修改驱动器12与隧道11的方向T之间的定向b/转动驱动单元来变化驱动方向D(见图1和图6)。
另外,由于在桥头13与隧道11之间设置有圆形舱室22,在桥头13与隧道11之间构成转轴,因此可以调适桥头13的方向B与隧道11的方向T之间的相对角度定向a。当桥头13对接到飞机1时,桥头底板17的接近边缘20平行于飞机的机身2定向,该接近边缘可以由底板减震器18(参见图5)构成。
乘客登机桥设置有常规的提升设备,使得可以变化桥头的高度。
图1示出了位于对接位置(情况A)的乘客登机桥10。在自动分离之前,需要执行几个步骤。
观测相机5(其中一些可以定位在乘客登机桥之内或之外)观测乘客登机桥的安全区域。安全区域可以是PBB内、特别是隧道、圆形舱室和/或桥头内或PBB附近的任何区域,(未经授权的)人员不能位于该区域或无意的障碍物在自动操作期间不能位于该区域。因此,可以通过一个或多个相机5来监视安全区域。可以使用自动检测过程来检测安全区域中的任何意外移动。意外的移动也可以通过移动传感器、特别是挡光板来检测。
特别地,操作员将例如通过按压按钮、特别是失能按钮来给出允许乘客登机桥移动的信号。因此,操作员可以得到各种信息。例如,可以在操作员站经由屏幕将由观测相机5记录的图像提供给操作员。基于所显示的信息,操作员进入允许或不允许开始分离过程的状态。特别是释放失能按钮将导致移动停止。该按钮可以是屏幕上的软按钮。
在分离之前,分析驱动方向与机身之间的关系。这可以借助于附接在隧道11与驱动设备12以及隧道11与桥头13之间的角度传感器来完成。由此可以获得当前的驱动方向D。在图1的情况下,驱动方向D大体上平行于桥头13的方向B。因此,给驱动设备12的提供动力将导致接近边缘20垂直于飞机1的机身2的移动(箭头P)。一般而言,桥头方向13被理解为垂直于接近边缘20的方向;由于在适当对接的PBB中,接近边缘20在机门的区域中平行于机身2的方向F,因此桥头13的方向B被认为垂直于机身2的方向F。
与之相反,在图6中示出了一种情况,其中,驱动方向D大体上垂直于桥头13的方向B。给驱动器12提供动力将导致平行于机身2的移动。与图1的情况A相比,此处增加了损坏机身2的风险。因此,检测和分析驱动方向D,特别是与临界值进行比较。当检测到如图6所示的情况时,驱动单元的移动将被禁用。在驱动单元移动之前,驱动单元必须转动约90°。如果分析得出的结论是,驱动方向适合桥头13的安全移动,则能够进行移动。在本申请的含义内,术语驱动单元的转动不被认为是驱动单元的移动。但是驱动单元可以在移动期间转动以改变移动方向。
为了分析驱动方向D与机身2的方向F之间的关系,可以查询驱动器12与隧道11之间的角度定向b以及隧道11与桥头13之间的角度定向a,两者都是由传感器(未显示)获得的。在图1的优选情况A中,角度定向b与a之间的差为0。在图6所示的非优选情况A中,角度定向b与角度定向a之间的差为90。如果角度定向b与a之间的差大于预定的临界值(例如30度),则驱动器12的移动被防止,因为平行于机身的移动部件承担了更大的损坏风险。
图1至图4示出了轨迹60,该轨迹是桥头13从对接位置(图1中的情况A)到停放位置(图3中的情况C和图4中的情况D)的移动的基础。轨迹60表示在移动期间必须经过的、例如驱动器12的中心的位置。在此,根据轨迹60,桥头沿x方向和y方向执行移动,从情况A经过情况B到情况C和/或情况D。
在第一阶段A-B(情况A与情况B之间的阶段)期间,桥头13优选地以如下方式移动:将接近边缘20保持在平行于机身2的方向F的定向上,直到接近边缘20到达至少为预定的安全距离的距机身的距离d20。安全距离可以至少为0.5m。在到达安全距离之前,不允许使接近边缘20移出与机身2的方向F平行对准的方向的桥头移动或沿不垂直于机身2的方向F的方向的桥头移动。在该阶段期间,隧道11的方向T的改变量很小,因为隧道围绕其连接到航站楼的第一端旋转。因此,在阶段A-B期间,必须继续重新调整桥头13与隧道11之间的定向角度a,以使桥头13保持垂直于机身方向F。
在实施例中,当在情况B中距离d20已经达到预定的安全距离时,可以停止继续重新调整桥头13与隧道11之间的定向角度a。因此,在进一步分离到情况C的过程期间(图3),角度定向a可能不再改变。因此,角度向定向a在情况B和情况C下可以相同。
在另一实施例中,当在情况B中距离d20已达到预定的安全距离时,以不同的方式执行对角度定向的重新调整。为了更好地理解,参考描述一种用于自动对接的方法的、申请人的专利申请18 382 372.3,或要求其优先权的任何在后的专利申请。这里描述了基于相机的自动对接过程。通过相机50(见图4),在对接的最后阶段期间跟踪机门3的位置。对接相机50安装在桥头13的内部区域中。这是对接相机50的有利位置,因为在对接的最后阶段,机门3尽可能长地位于视场51内。从并行专利申请的说明书中可以清楚地看到,对于自动对接过程而言,优选的是,机门3尽可能早地进入对接相机50的视场中。因此,在情况B下的分离期间,桥头13已被重新调整,使得机门尽可能长时间地停留在视场中;因此,桥头13的方向B指向机门3的位置。当然,待对接的飞机的位置很可能具有不同的类型;然而,与先前描述的图3的实施例相比,增加了在视场内尽可能早地覆盖下一架飞机的机门的机会。
因此,在该实施例中,在情况B之后,当在俯视图中观察时,桥头13顺时针旋转(见图4中的箭头CW),其中隧道11逆时针旋转(见图4中的箭头CCW)。
现在,为了支持已经在分离期间执行对接过程的性能,桥头13的方向B以如下方式来重新调整:使得对接相机50的视场51至少大致朝向最近的飞机的机门的方向。
因此,在进一步分离到情况C的过程期间(图3),角度定向a可能不再改变。情况B和C下的角度定向a可以相同。
图7以俯视图示出了作为桥头13移动的基础的轨迹60。该轨迹特别地包括路径61,路径61特别地表示在移动期间必须经过的位置,例如驱动设备12的中心。在此,根据轨迹60,桥头13执行沿x方向和y方向的移动,从对接的情况A经过情况B到情况C或D中的任何一个,其中PBB处于停放位置。另外,该轨迹可以至少部分地包括在路径的过程期间期间的桥头13的定向62。
特别是在这种情况下,桥头的定向62垂直于机身,如图1所示。在情况A与情况B之间的第一分离阶段期间,定向62保持不变,使得在该情况下,定向62仍然垂直于机身2,如图2所示。
轨迹60还可以用于评估PBB10与障碍物之间的碰撞。通常,可以比较第一图像与第二图像来检测障碍物。第一图像可以是示出没有任何障碍物的停机坪区域的预存储图像。第二图像是实际图像,示出了停机坪的当前情况。借助于图片识别,可以确定两个图像之间的差异。存在于第二图像中但不存在于第一图像中的任何物体均可以被视为障碍物。
但是,并非停机坪中的所有障碍物都带来了问题。在本发明的范围内,只有此类障碍物才可能带来问题:其位于轨迹的区域中。在图6中,描绘了第一障碍物63和第二障碍物64的示例性位置。
第一障碍物63具有到轨迹d63的平面图距离,该距离大于所需的最小净距离c。因此,第一障碍物63不被认为是有问题的。第二障碍物64具有到轨迹d64的平面图距离,该距离小于所需的最小净空距离c60。因此,第二障碍物64被认为是有问题的。第二障碍物64的存在将促使控制单元切换到安全模式。在安全模式下,PBB的移动可能会停止,或者至少会发出警告信号。有可能存在不同的安全模式,为其分配了不同的净空距离。
图9示出了具有多停机坪坡道系统(MARS)停机场的登机口。在此,设置了三个中心线24a-c,该三个中心线24a-c指示了不同飞机1a-c的停放位置。停机场包括两个乘客登机桥10a、10b,它们可以将飞机与航站楼23连接。
图9a示出了当将要对接第一飞机1a时的对接情况:第一飞机1a是宽体飞机,例如空客A350。由于尺寸,如果宽体飞机位于停机场上,则其他飞机不能同时位于所述停机场上。示出了两个登机桥10a、10b位于其停放位置,等待开始对接过程。第一乘客登机桥10a将对接到第一机门,第二乘客登机桥10b将对接到第二机门。以如下方式确定两个停放位置:它们一方面为进入的飞机提供足够的净空。另一方面,以如下方式确定两个停放位置:能够在短时间内实现对接过程。
图9b示出了当第二飞机1b和第三飞机1c将要对接时的另一种对接情况。两架飞机都是单走道飞机,例如空客A320或更小的飞机,其所需空间比图9a的宽体飞机更小,使得它们中的两个可以同时位于所述停机场上。示出了两个登机桥10a、10b位于其停放位置,等待开始对接过程。第一乘客登机桥10a将对接到飞机1b,第二乘客登机桥10b将对接到飞机1c。以如下方式确定两个停放位置:它们一方面为进入的飞机提供足够的净空。另一方面,以如下方式确定两个停放位置:能够在短时间内实现对接过程。
特别地,基于下一对接情况从多个预定的停机位置中选择停放位置。特别地,所选择的停放位置可以被认为是用于下一对接过程的合适的前位置。
由于对接情况,停放位置在图9a和图9b的情况下是不同的。例如,根据图9b的停放的乘客登机桥10b将与进入的图9a的飞机1a碰撞。为了在前一飞机的分离期间实现改善的并且情况自适应的停放位置,考虑下一架到达的飞机的对接情况。因此,如果下一架飞机是停放在中心线24a上对接的A350飞机,则PBB将在上一分离移动期间进入停放位置。为此目的,利用飞行控制系统;在此,在数据库中存储了下一架到达飞机的相关信息。在分离期间,将检索并且分析下一架到达飞机的信息,使得在分离期间可以确定下一对接过程的最佳停放位置。
图11还示出了支持不同的下一对接情况的本发明的实施例。在图11a中,待分离的飞机位于某个停止位置。停机场具有多个停放位置S1、S2、S3,特别是停放位置S1、S2、S3分布在至少两个中心线24、14b、24c上。一个中心线可以分配超过一个停止位置。
图11a示出了当前与PBB 10对接的飞机1。PBB 10将要分离。根据现有技术,PBB 10将总是移动到一般停放位置,以10p的虚线指示。一般停放位置10p位于与任何飞机有足够距离的位置,而与它将停在多个停放位置中的哪个停放位置无关。
图11b示出了本发明的改进。在这里为了说明的目的,用虚线描绘了飞机1a、1b、1c,其指示在图11a的飞机1离开停机场之后接下来将停放在停机场上的飞机。可以看出,下一架飞机可以停放在任何停止位置S1、S2、S3。分配给停止位置中的每一个的是PBB的单个停放位置,用附图标记10pa、10pb、10pc指示。从图中显而易见的是,可以减少PBB的整体移动,从而将对接和/或分离所需的持续时间减少到最小。此外,PBB10的可移动部件受到显著较低的磨损。通过图11描述的方法要求在进行分离移动期间可获得有关下一对接情况的信息。在实施例中,如果预期至少在一定时间内没有飞机到达停机场,则PBB 10可以移动到如图11a所示的一般停放位置10p。
图10示出了位于底板减震器18的空腔中的传感器19。该传感器适于测量接近边缘与机身之间的距离d20。在分离移动期间,该传感器检查桥头13是否真的离开机身2。在距离d20没有增加的情况下,假定存在可能导致驱动设备紧急停止的任何故障。特别是当距离d20在移动期间减小时,驱动设备的角度传感器可能存在故障,指示驱动方向D错误(见图1)。
1 飞机
2 飞机机身
3 飞机机门
5 观测相机
6 侧窗
7 驾驶舱窗口
10 乘客登机桥
11 隧道
12 驱动设备
13 桥头
14 空腔
15 顶篷
16 顶篷减震器
17 底板
18 底板减震器
19 距离传感器
20 接近边缘
21 到航站楼的方向
22 圆形舱室
23 航站楼
24 中心线
50 自动对接相机
51 视场
60 轨迹
61 路径
62 定向
63 第一障碍物
64 第二障碍物
T 隧道方向
B 桥头方向
D 驱动设备方向
a 相对桥头与隧道之间的定向角度
b 隧道与驱动系统之间的定向角度
P 垂直于机身的方向
c60 距轨迹的安全距离
c10 PBB内的安全区
d20 接近边缘与机身之间的距离
d63、d64 轨迹与物体之间的距离
CW 顺时针转动方向
CCW 逆时针转动方向
- 将乘客登机桥从飞机自动分离的方法
- 两个彼此铰接的车辆间过渡部的折棚或者飞机乘客舷梯或飞机乘客登机桥的折棚