医疗注射力传感器
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及医疗注射技术领域,特别涉及一种医疗注射力传感器。
背景技术
目前医疗注射泵药物注射方法:通常采用电机带动螺杆旋动,驱动螺母前进或者后退,来实现注射器活塞运动,从而完成注射或者吸液,又可以称为定速泵或者定容泵。该类泵注射精度高由机械和电子控制精度,完全不受注射器和管路阻力影响,亦即不管前端管路压力是否波动,以及注射器活塞摩擦阻力是否变化,注射泵都会按照设定的速度完成注射。但如此就完全不清楚注射器活塞或人体药物注入管路情况,仅是单纯的实现机械运动,不能够对管路情况实现闭环监控预警,进而危及人身安全。目前为了减少注射风险,必须要安排人力实时查看注射情况,增加了人力成本且可靠性差。
发明内容
为了解决上述问题,本发明提供了一种医疗注射力传感器,能够在注射过程中实时自动感测注射器的注射压力,大大减少了人力成本并降低了医疗风险。
本发明通过如下方案来实现:一种医疗注射力传感器,包括:
支撑体;
装设于所述支撑体的压力感测模块,所述压力感测模块上设有用于感测注射器活塞所受压力的锥状凸台以及间隔设置于所述锥状凸台四周的多个应变片,所述锥状凸台在感测到所述压力时向四周施力并带动多个所述应变片发生形变;
与多个所述应变片连接的电信号处理模块,所述电信号处理模块在多个所述应变片发生形变时,将因形变产生的电阻增量转换成电压信号输出。
本发明在活塞受压运动过程中,通过锥状凸台感测所受压力的变化(即活塞管路阻力变化)、并通过向四周施力带动四周应变片发生形变,进而得到电阻增量,然后通过电信号处理模块将电阻增量转换成与变化的压力相对应的电压信号输出,进而实现对药物注入整个过程状态的监控和人员安全的保护,大大减少了人力成本并降低了医疗风险,同时,该力传感器结构简单、占用空间小、可靠性高、精度高、寿命长,且锥状凸台设计,使得该力传感器在对压力进行感测时不会受到传统技术中力施加角度的限制。
本发明医疗注射力传感器的进一步改进在于,所述支撑体为筒状,所述压力感测模块嵌装于所述支撑体的第一筒口处,且所述锥状凸台凸出于所述支撑体。
本发明医疗注射力传感器的进一步改进在于,所述压力感测模块为圆盘状,且分别于中部和边缘向盘内凸出并形成第一凸出部和第二凸出部,所述第一凸出部的中间进一步向所述盘内凸出并形成所述锥状凸台,盘底上布置有多个所述应变片且所述盘底嵌入所述支撑体,所述第二凸出部拦挡并固定于所述第一筒口的边缘。
本发明医疗注射力传感器的进一步改进在于,所述第一筒口的边缘沿环向间隔固定有多个铆接柱,所述第二凸出部上设有分别供多个所述铆接柱铆接的多个铆接孔。
本发明医疗注射力传感器的进一步改进在于,所述铆接柱铆接至相应所述铆接孔时,所述锥状凸台凸出于多个所述铆接柱的末端所在平面。
本发明医疗注射力传感器的进一步改进在于,所述支撑体的外周面设有定位切面,所述第二凸出部的外轮廓与所述支撑体的外周轮廓相同。
本发明医疗注射力传感器的进一步改进在于,所述电信号处理模块为环形电路板,所述环形电路板的边缘与所述支撑体的内壁固定。
本发明医疗注射力传感器的进一步改进在于,所述电信号处理模块连接有信号输出连接模块,所述信号输出连接模块包括导线和供外部用户界面对接的插头,所述导线的一端与所述电信号处理模块的输出端连接,所述导线的另一端伸出至所述支撑体外并与所述插头连接。
本发明医疗注射力传感器的进一步改进在于,所述支撑体的第二筒口处盖设有一保护盖,所述保护盖上开设有供所述导线伸出的导线槽。
本发明医疗注射力传感器的进一步改进在于,所述支撑体的第二筒口处设有向内凸出的定位件,所述电信号处理模块上与输出端相对的位置处开设有与所述定位件相适配的第一定位凹口,所述保护盖上与所述导线槽相对的位置处开设有与所述定位件相适配的第二定位凹口。
附图说明
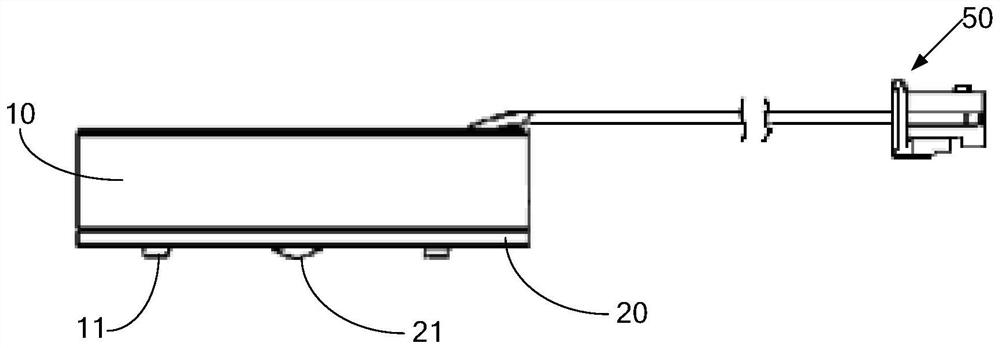
图1示出了本发明力传感器的整体结构主视图。
图2示出了本发明支撑体的立体结构示意图。
图3示出了本发明压力感测模块的主视结构示意图。
图4示出了图3的A-A侧剖图。
图5示出了本发明惠斯通电桥原理图。
图6示出了本发明电信号处理模块的立体结构示意图。
图7示出了本发明保护盖的立体结构示意图。
图8示出了本发明信号输出连接模块的立体结构示意图。
图9示出了本发明力传感器的整体结构俯视图。
图10示出了本发明力传感器的实施例示意图。
具体实施方式
为了解决传统泵类注射器不能对管路情况进行监控、注射风险较高问题,本发明提供了一种医疗注射力传感器,能够在注射过程中实时自动感测注射器的注射压力,大大减少了人力成本并降低了医疗风险。
下面结合附图对该医疗注射力传感器作进一步说明。
参阅图1和图3所示,一种医疗注射力传感器,包括:
支撑体10;
装设于该支撑体10的压力感测模块20,该压力感测模块20上设有用于感测注射器活塞所受压力的锥状凸台21以及间隔设置于该锥状凸台21四周的多个应变片22,该锥状凸台21在感测到该压力时向四周施力并带动多个该应变片22发生形变;
与多个该应变片22连接的电信号处理模块,该电信号处理模块在多个该应变片22发生形变时,将因形变产生的电阻增量转换成电压信号输出。
具体来说,该力传感器在使用时,装设于该活塞受压端以及施压端之间,使施压端施加的压力经该力传感器传递给该活塞受压端,而注射管内产生的阻力也经该力传感器传递给该施压端,也就是说,该力传感器能够完整的感受到施加的压力以及注射管的阻力。为了保证该锥状凸台21能够准确感测到注射器活塞可能受到的各种角度的压力,在使用时,将该锥状凸台21抵顶至该活塞受压端的中间位置,以保证该锥状凸台21在对该活塞受压端的压力进行感测时不会受到传统技术中力施加角度的限制。进一步地,为了使该力传感器输出的电压信号更加接近于该注射器活塞实际受压情况,优选该应变片22的数量为四个,四个该应变片22以该锥状凸台21为中心等间距间隔的布置,且四个该应变片22通过金属丝与该电信号处理模块连接形成惠斯通电桥,配合图5所示,+ΔR和-ΔR代表各该应变片22的电阻增量,ASIC为集成芯片或电路板形式的电信号处理模块,该电信号处理模块具有计算、补偿及放大等功能,将各应变片22的电阻增量进行处理,得到与压力相对应的电压信号并输出,以便于外部用户的收集和进一步数据的处理。该电信号处理模块的具体电路及工作原理均为现有技术,此处将不再赘述。
作为一较佳实施方式,配合图2所示,该支撑体10为筒状,该压力感测模块20嵌装于该支撑体10的第一筒口处,且该锥状凸台21凸出于该支撑体10。
具体来说,优选该支撑体10的直径与注射器的活塞直径相适配,该锥状凸台21位于该支撑体10的中心位置,以便于在使用时,将支撑体10对其装设在活塞受压端处即可保证该锥状凸台21的凸出部分抵顶至该活塞受压端的中间,进而保证在活塞受压运动时,该锥状凸台21能够准确感测到各个角度的压力,并将该压力向四周传递至各应变片22。
作为一较佳实施方式,结合图2、图3和图4所示,该压力感测模块20为圆盘状,且分别于中部和边缘向盘内凸出并形成第一凸出部和第二凸出部,该第一凸出部的中间进一步向该盘内凸出并形成该锥状凸台21,盘底上布置有多个该应变片22且该盘底嵌入该支撑体10,该第二凸出部拦挡并固定于该第一筒口的边缘。
作为一较佳实施方式,配合图2所示,该第一筒口的边缘沿环向间隔固定有多个铆接柱11,该第二凸出部上设有分别供多个该铆接柱11铆接的多个铆接孔23。通过铆接的方式连接,便于该压力感测模块20与该支撑体10的拆装,方便检修和更换。
进一步地,该铆接柱11铆接至相应该铆接孔23时,该锥状凸台21凸出于多个该铆接柱11的末端所在平面,如图1所示,以保证该力传感器在使用时,该锥状凸台21能够抵顶至活塞受压端,且为该锥状凸台21提供了一定的形变空间。
作为一较佳实施方式,结合图2和图3所示,该支撑体10的外周面设有定位切面12,该第二凸出部的外轮廓与该支撑体10的外周轮廓相同。
在嵌装该压力感测模块20时,将该压力感测模块20与该支撑体10对齐安装即可,方便对该压力感测模块20的定位,可实现二者的快速组装。
作为一较佳实施方式,参阅图6所示,该电信号处理模块为环形电路板,该环形电路板的边缘与该支撑体10的内壁粘结固定。通过将电信号处理模块装设于该支撑体10的内部,一方面节省空间,另一方面通过该支撑体10可以对该电信号处理模块起到一定保护作用。
作为一较佳实施方式,配合图8和图9所示,该电信号处理模块连接有信号输出连接模块50,该信号输出连接模块50包括导线51和供外部用户界面对接的插头52,该导线51的一端与该电信号处理模块的输出端31连接,该导线51的另一端伸出至该支撑体10外并与该插头52连接。
具体来说,该导线51与该电信号处理模块焊接连接,该插头52通过插头端子一端与该导线51铆接,另一端与外界用户界面对插连接,使得操作便捷且可靠。
作为一较佳实施方式,配合图7所示,该支撑体10的第二筒口处盖设有一保护盖40,该保护盖40上开设有供该导线51伸出的导线槽41。
具体来说,该保护盖40通过胶粘固定于该支撑体10,且该保护盖40于导线槽41处对该导线51做绝缘固定保护,以确保导线51不受外界复杂环境影响且可靠。
作为一较佳实施方式,结合图2、图6和图7所示,该支撑体10的第二筒口处设有向内凸出的定位件13,该电信号处理模块上与输出端31相对的位置处开设有与该定位件13相适配的第一定位凹口32,该保护盖40上与该导线槽41相对的位置处开设有与该定位件11相适配的第二定位凹口42。通过上述定位设置,便于该力传感器各零件的准确定位和安装。
本发明既可以用于普通注射器也可以用于自动注射器,对于普通注射器来说,该施压端可以是人力施压,对于自动注射器来说,该施压端可以是电动施压设备,如图10所示,本实施例的注射器为自动注射器60,其活塞受压端处设有用于驱动该活塞运动的驱动装置70,该驱动装置70包括支架和电机驱动螺杆,该支架装设于注射器60的活塞受压端位置处,该支撑体10固定安装于该支架上且使锥状凸台21抵顶至该活塞受压端,该电机驱动螺杆的移动端与该支架固定,该电机驱动螺杆与该外部用户界面80连接,该外部用户界面80同时与该电信号处理模块的输出端连接,且该外部用户界面80预先设定有注射参数和报警阈值。其工作原理为:该外部用户界面80控制该电机驱动螺杆按照注射参数(包括设定速度等)驱动注射器的活塞移动。在活塞移动的过程中,该力传感器感测压力变化并输出与压力相对应的电压信号至该外部用户界面80,该外部用户界面80将该电压信号与报警阈值相比较,来判断活塞受力情况(即管内阻力情况),根据活塞受力情况来调整注射参数或发出报警等。通过该力传感器与自动注射器60的配合,可以实现注射全程闭环控制。
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
- 医疗注射力传感器
- 应用于医疗注射泵的注射器推座夹持系统以及医疗注射泵