一种基于凸优化的燃料电池汽车能量管理方法
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及燃料电池汽车的能量管理技术领域,特别涉及一种基于凸优化的燃料电池汽车能量管理方法。
背景技术
目前,环境污染和能源短缺已成为汽车产业发展面临的两大难题。燃料电池汽车作为新能源汽车的重要分支,具有高效、清洁、零污染的优势,逐渐成为行业的研究热点。
受限于燃料电池电堆功率性能的影响,燃料电池汽车通常会匹配一块动力电池与燃料电池发动机协同工作,这样的动力系统其能量管理和控制问题属于非线性、多变量的时变问题。通过整车能量管理实现各动力源功率的合理分配,可以有效提高整车系统性能。在现有的研究中,提出了很多关于燃料电池汽车能量管理的方法,主要分为两类:基于规则的方法和基于优化的方法。
基于规则的能量管理控制策略主要包括有限状态机控制策略、功率跟随控制策略、模糊规则控制策略和自适应模糊控制策略等。基于规则的能量管理策略因设计简单、计算量小、鲁棒性强等特点,在实车上得到了广泛的应用,但该种策略不能保证结果的最优性。
基于优化的控制策略是在工况已知的情况下,借助优化算法求解各动力源能量的最优分配,主要算法包括庞特里亚金最小值原理、动态规划、模型预测控制和凸优化等。总体而言,基于优化的能量管理策略虽然保证了结果的最优性,但是计算量大,难以实现实时控制。
凸优化是求解目标函数为凸函数、可行域为凸集的一种优化算法,使局部最优解与全局最优解保持一致,将求解过程进行了极大的简化。目前,很多学者已将凸优化方法应用到了混合动力汽车的能量管理问题中,但在燃料电池汽车能量管理中运用较少。
上述研究虽然利用凸优化方法实现了燃料电池汽车实时能量管理,但尚未探索交替方向乘子法在燃料电池能量管理问题上的可行性,提高能量管理算法的实时性,同时为了简化优化问题,忽略了燃料电池动态响应约束。
凸优化是求解目标函数为凸函数、可行域为凸集的一种优化算法,使局部最优解与全局最优解保持一致,将求解过程进行了极大的简化。目前,很多学者已将凸优化方法应用到了混合动力汽车的能量管理问题中,但在燃料电池汽车能量管理中运用较少。
上述研究虽然利用凸优化方法实现了燃料电池汽车实时能量管理,但尚未探索交替方向乘子法在燃料电池能量管理问题上的可行性,提高能量管理算法的实时性,同时为了简化优化问题,忽略了燃料电池动态响应约束。
发明内容
本发明针对现有技术的缺陷,提供了一种基于凸优化的燃料电池汽车能量管理方法,解决了现有技术中存在的缺陷。
本发明提出将凸优化方法中的交替方向乘子法运用到燃料电池汽车的能量管理中,用于提高燃料电池汽车能量管理的算法实时性和动态响应特性。目前,将交替方向乘子法运用到燃料电池汽车能量管理中的研究尚不深入。燃料电池汽车相对于混合动力汽车除动力系统结构不同之外,由于水、热、气控制的原因,存在燃料电池动态响应较慢的问题。本发明提出利用循环约束检验策略控制燃料电池的功率,使其满足功率的升降约束。通过仿真结果证明,本发明提出的算法在求解燃料电池汽车的能量管理问题时既能满足实时性,又能得到近似最优解。
本发明所定义的技术名称如下:
SoC: 蓄电池剩余容量与其完全充电状态的容量的比值,其取值范围为0-1。
转凸处理:指通过一些技术手段对已经建立的数学模型进行凸化处理,使模型的中的函数和可行域均满足凸优化算法的基本要求,从而达到利用凸优化算法求解问题的目的。
为了实现以上发明目的,本发明采取的技术方案如下:
本发明提出了一种基于交替方向乘子法求解燃料电池汽车能量管理问题的方法。以最小氢耗为目标函数,搭建了一种符合凸函数性质的新型燃料电池动力系统和整车模型,建立了系统模型的增广拉格朗日方程及其缩放形式,满足交替方向乘子法求解的标准范式,首次实现了交替方向乘子法在燃料电池汽车能量管理上的系统应用。同时,本发明提出了一种循环约束检验方法对燃料电池系统功率进行进一步精确控制,使其满足功率的动态变化约束。与其他算法相比,该算法能够在快速求解问题的同时,保证结果的最优性。
具体步骤如下:
一种基于凸优化的燃料电池汽车能量管理方法,包括以下步骤:
S1、结合车辆纵向动力学及燃料电池汽车的动力系统结构,建立燃料电池车辆纵向动力学模型,及三个系统之间的能量传递关系式;
S2、结合燃料电池汽车的动力系统结构及燃料电池系统特性、电机系统特性和动力系统特性,建立燃料电池系统模型、电机系统模型和动力电池系统模型;
S3、对所建立的燃料电池系统模型、电机系统模型和动力电池系统模型进行转凸处理,形成可用于凸优化算法的燃料电池汽车能量管理的凸模型;
S4、根据车辆的动力系统结构及车辆的运动模式,结合S3步骤中的凸模型中的各动力系统的表达式,计算燃料电池系统的燃氢功率,并建立以最小氢耗为目标的代价函数;
S5、根据凸函数的基本性质,对S4中以最小氢耗为目标的代价函数进行凸性证明;
S6、对完成S5步骤中凸性证明的代价函数进行可行域分析,确定代价函数的可行域;
S7、建立经过S5、S6步骤的代价函数满足交替方向乘子法的标准范式,形成适用于交替方向乘子法的新的代价函数;
S8、建立S7步骤中代价函数的缩放形式,并利用交替方向乘子法对其进行迭代求解;
S9、采用循环约束检验方法对S8步骤求解的燃料电池系统功率或燃料电池系统输出功率进行进一步精确控制,使其满足功率的动态变化约束。
进一步地,所述步骤S3中三个系统模型的转凸处理方法,包括以下步骤:
S3.1、燃料电池系统模型的转凸处理方法为结合燃料电池系统的工作效率,将燃 料电池系统在
其中
S3.2、电机系统的转凸处理方法为结合电机的工作效率及特性曲线,将电机系统 在
其中
S3.3、动力电池系统的转凸处理方法为将电池简化为一阶等效电路,通过动力电 池开路电压
进一步地,所述步骤S4中建立以最小氢耗为目标的代价函数,包括以下步骤:
S4.1、根据车辆的需求功率
S4.2、在步骤S4.1的三种模式中,当
再结合步骤S2中的凸模型公式,燃料电池系统功率可以表示为:
S4.3、结合氢气的低热值,车辆行驶的总耗氢量即目标函数可表达为:
其中,
进一步地,所述步骤S5中凸性证明,包括以下步骤:
S5.1、建立满足凸函数性质
有:
S5.2、经过凸模型的关系式推导出能证明目标函数不仅能满足凸函数性质,而且 还是关于
进一步地,所述步骤 S6中确定代价函数的可行域,包括以下步骤:
S6.1、受燃料电池功率限制。当
可推出:
当
进一步地,所述步骤S7中形成适用于交替方向乘子法的新的代价函数,包括以下步骤:
S7.1、结合交替方向乘子法的标准范式,将步骤S4.3中的目标函数写成关于
其中约束条件的标准形式为:
其中
进一步地,所述步骤S8中代价函数的缩放形式,并利用交替方向乘子法对其进行迭代求解,包括以下步骤:
S8.1、建立步骤S7.1中目标函数的缩放形式:
S8.2、利用交替方向乘子法进行求解时,各个参数的具体迭代过程如下:
S8.3、针对步骤S8.2中
令
再利用三次方程的求根公式或者牛顿迭代方法,求解
S8.4、使用交替方向乘子法迭代求解过程中,原始残差和对偶残差为:
原始残差的阈值
进一步地,所述步骤S9中采用循环约束检验方法对求解的燃料电池系统功率或燃料电池系统输出功率进行进一步精确控制,使其满足功率的动态变化约束,包括以下步骤:
S9.1、首先,用求解出的燃料电池系统功率中第
S9.2、经过S9.1步骤的循环后,重新推出动力电池的功率
与现有技术相比,本发明的优点在于:
本发明提出利用凸优化中的交替方向乘子法求解燃料电池汽车能量管理的问题,详细的阐述了模型凸化的过程,并给出了凸性证明。此外,还提出了一种循环约束检验策略,解决了燃料电池的功率升降的问题。与其他算法相比,该算法能够在快速求解问题的同时,保证结果的最优性。
附图说明
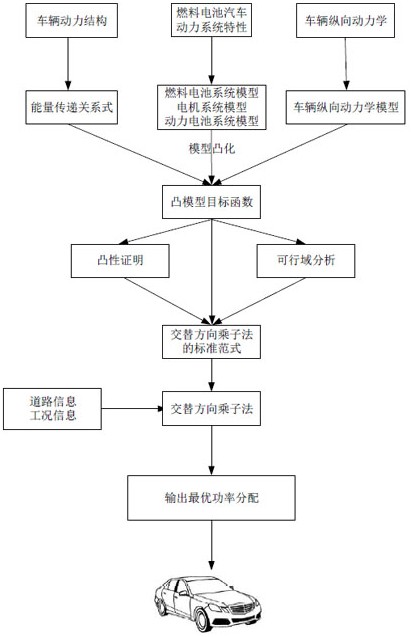
图1是本发明的流程示意图;
图2是实施例的燃料电池汽车动力系统功率拓扑图;
图3是实施例的一种循环检验方法。
具体实施方式
结合实施例说明本发明的具体技术方案。
本发明的流程图如图1所示。包括以下步骤:
1 、建立燃料电池汽车模型
图2为燃料电池汽车动力系统的功率拓扑结构,整车驱动能量由燃料电池和动力电池共同提供。
其中,
根据车辆纵向动力学,可以计算出车辆的需求功率:
(a)建立燃料电池系统模型
燃料电池系统通过氢气和氧气电化学反应将化学能
其中,
然后通过氢气的低热值
此外,受燃料电池电堆功率性能的影响,燃料电池系统功率变化受到一定限制。
其中,
(b)建立电机系统模型
根据车辆的传动比
在车辆行驶过程中,当需求功率
其中,
(c)建立动力电池系统模型
如前所述,燃料电池汽车通常会匹配一块动力电池,一是弥补燃料电池动态响应较慢的缺点,二是回收车辆制动时产生的能量,保证系统的安全性和可靠性。为了便于研究,可将动力电池系统内部简化为一阶等效电路。
其中,
2 、燃料电池汽车动力学模型的凸化
凸优化算法的使用对象是可行域为凸集,目标函数为凸函数的数学模型。所以在使用交替方向乘子法之前,要将燃料电池能量管理的模型转化为凸优化模型。在原有模型中主要有三个系统涉及到能量转化,分别为燃料电池系统、电机系统和动力电池系统,以下为三个系统模型的凸化过程。
(a)燃料电池系统凸化
通过燃料电池系统效率图将
其中
(b)电机系统凸化
通过电机系统效率图将
因不同转速下电机的效率曲线不同,所以
(c)动力电池系统凸化
通过动力电池开路电压
、建立燃料电池能量管理的目标函数
根据车辆的动力结构,可将行驶状态为三种情况。
表1 车辆的运动状态的3种情况
结合(12)和(15)燃料电池系统功率可表式为:
结合(5)和(16)车辆行驶的总耗氢量即目标函数可表达式如下:
其中,
、燃料电池汽车动力系统凸模型的凸性证明
由凸函数的基本性质可知,证明函数
因为燃料电池的工作区间为
在(15)中,
又因为
同样,
令:
将(22)带入(21)中:
由(20)和(23)可得:
所以,目标函数中
、燃料电池汽车动力系统凸模型的可行域分析
以上证明了目标函数是一个关于
首先,在转化的过程中,出现公式
其次,受燃料电池最大功率限制。
当
当
、基于交替方向乘子法的问题求解
(a)交替方向乘子法介绍
交替方向乘子法是凸优化领域中的一种重要算法,适用于求解分布式凸优化问题。该算法是对偶上升法和增广拉格朗日乘子法的融合算法,即保留了对偶上升法的可分解性,也融入了增广拉格朗日乘子法的收敛性。
其标准形式如下:
其中
其拉格朗日形式为:
其增广拉格朗日形式为:
式中:
定义原始残差
令
因为
迭代求解的过程如下:
收敛性判断的准则为原始残差
(b)交替方向乘子法的能量管理模型
将目标函数(17)写成关于
引入
其中
动力电池能量
函数(35)的增广拉格朗日形式为:
其中
函数(39)的缩放形式为:
为了避免动力电池功率
利用交替方向乘子法进行求解时,各个参数的具体迭代过程如下:
其中,
令
再利用三次方程的求根公式或者牛顿迭代方法,求解
由动力结构可知,动力电池的输出功率越高,则燃料电池系统的输出功率越小,所 以设置迭代初始值为:
原始残差和对偶残差为:
原始残差的阈值
在整个过程中,动力电池功率
、循环约束检验
综上,求出该工况下动力电池功率
图3中,
经过循环后,重新推出动力电池的功率
最后,结合(12)和(14),通过动力电池功率
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的实施方法,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
- 一种基于凸优化的燃料电池汽车能量管理方法
- 基于凸优化考虑电机热状态的混合动力汽车能量管理方法