一种智能无人机
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及无人机技术领域,具体讲是一种智能无人机。
背景技术
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行。回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收。可反复使用多次。广泛用于空中侦察、监视、通信、反潜、电子干扰等。
发明人在实现本发明实施例的过程中,发现现有技术中至少存在以下缺陷:
第一、智能无人机用于植保工作中的关键技术点之一就是续航问题,相较于普通的视觉无人机,用于植保工作中的无人机还需要增加设置单独的动力泵系统,将水药喷洒,动力泵系统的运行需要耗费能源,导致无人机的续航时间大大缩短。
第二、智能无人机用于植保工作中需要携带喷洒用箱体,当处于气温较低的环境和区域工作时,水箱中的水液会处于半凝固状态,导致喷洒排出时分布不均匀。
第三、智能无人机用于植保工作中时不仅要喷洒液体物质,还有喷洒颗粒物质的需求,现有无人机在喷洒不同物质时需要更换不同的喷洒机构,较为麻烦。
第四、当智能无人机携带装有水药的箱体时进行停止或者转弯,水药会在箱体内晃动,导致无人机的机体不稳,平衡调节过程中会额外消耗能量。
第五、用于植保工作中的智能无人机,在一次工作中,往往需要往复多次进行加油或者加药,这部分工作需要人工操作进行,较为麻烦。
发明内容
本发明的目的在于提供一种智能无人机,以上述背景技术中提出的技术问题。
本发明的技术方案是:一种智能无人机,包括机架,所述机架上设置有飞控系统、动力系统和喷洒箱,其中动力系统包括油箱、若干个发动机和旋翼,所述机架上安装有若干个气能利用组件,气能利用组件与发动机的排气管连接,且气能利用组件与喷洒箱连接,并且气能利用组件与喷洒箱一侧的喷液管配合连接,所述喷洒箱的底部设置有自封闭加液口组件,且喷洒箱的底部设置有风动旋撒组件。
作为本技术方案的进一步优化,所述气能利用组件包括传输管、涡轮组件和柱塞泵,所述传输管的一端与排气管的出口连接,所述涡轮组件设置于传输管靠近排气管的一端,所述涡轮组件包括涡轮、涡壳和传动轴,且涡壳的一侧连接有柱塞泵的一侧,柱塞泵一端的柱塞泵主轴与传动轴的一端连接,且柱塞泵的出口通过加压管连接有喷洒箱的顶部;
所述传输管的中部安装有三元催化器。
作为本技术方案的进一步优化,所述传输管远离排气管的一端连接有二位三通导向阀的进口,二位三通导向阀的两个出口分别连接有换热排放管和直接排放管的一端,换热排放管的中部与喷液管螺旋缠绕配合连接。
作为本技术方案的进一步优化,所述传输管靠近排气管的一端为“Y”形结构,且该“Y”形结构的一端连接有涡壳的出口,涡壳的进口和“Y”形结构的另一端分别连接有二位三通控制阀的两个出口,二位三通控制阀的进口与排气管的出口连接。
作为本技术方案的进一步优化,所述传动轴靠近柱塞泵主轴的一端滑动套设有传动套筒的一端,传动套筒外转动套设有推拉环,推拉环的一侧铰接有推拉杆的一端,推拉杆的中部通过支撑销轴与涡壳活动连接,且推拉杆突出涡壳外的一端铰接有推拉缸的一端,推拉缸的另一端与柱塞泵的外壁铰接,所述传动套筒和柱塞泵主轴相靠近的一端分别对应设置有上摩擦片和下摩擦片。
作为本技术方案的进一步优化,所述喷洒箱的底部一侧开设有出口孔,该出口孔连接有喷液管的一端,喷液管的另一端设置有雾化喷头,所述喷洒箱的底部设置有自封闭加液口组件,自封闭加液口组件包括圆筒、隔板、筒罩、滑杆、回位弹簧和塞子,所述圆筒的底部与喷洒箱的底边连接,且圆筒的中间横向设置有隔板,隔板的中间开设有通孔,该通孔内契合设置有塞子,塞子的顶部通过回位弹簧连接有圆筒的顶部,且圆筒对应隔板上方位置的侧壁上开设有通孔;
所述圆筒的顶部罩设有筒罩,筒罩的内壁和圆筒的内壁之间设有空隙;
所述回位弹簧的中间穿设有滑杆,滑杆的一端与塞子固定连接,且滑杆的另一端穿过圆筒和筒罩的顶部。
作为本技术方案的进一步优化,所述喷洒箱的中间设置有缓冲筒,缓冲筒的顶部和底部分别与喷洒箱的顶部和底部固定连接,且缓冲筒的侧壁上均匀开设有通孔。
作为本技术方案的进一步优化,所述风动旋撒组件包括旋叶、中心轴、叶轮、阀板、密封盘和舵叶,所述密封盘滑动设置于喷洒箱底部的圆孔内,且密封盘的中间贯穿有中心轴,中心轴位于密封盘上方的部分连接有旋叶的中间,且中心轴位于密封盘下方的部分上转动套设有旋转节,旋转节的一侧通过连杆固定连接有舵叶,且旋转节的另一侧通过横轴转动连接叶轮的中部,横轴通过垂直传动齿轮组与中心轴连接,所述密封盘的顶部通过立杆连接有支撑环,支撑环的一侧设置有阀板,阀板的位置与喷洒箱连接喷液管的出口孔位置相对应;
喷洒箱底部的圆孔的底部环绕设置有凸沿,且该凸沿的高度大于叶轮的直径,所述凸沿的下方盖设有推拉架,推拉架的顶部与中心轴的下端转动连接,且推拉架的中间连接有电缸的一端,电缸的另一端与喷洒箱的底部固定连接。
作为本技术方案的进一步优化,所述机架的下方配合设置有分离式自动加注装置,分离式自动加注装置包括立式加注插管、导向定位槽、输送管、加注泵、动力底座、动力轮和储液箱,所述导向定位槽的侧壁为喇叭状结构,且该喇叭状结构与机架底部的结构相匹配,所述导向定位槽的中间设置有立式加注插管,立式加注插管上端的结构与圆筒和隔板的结构相匹配,且立式加注插管的下端通过输送管和加注泵连接有储液箱,所述导向定位槽、加注泵和储液箱的底部均连接有动力底座,动力底座的四角分别设置有动力轮。
作为本技术方案的进一步优化,所述喷洒箱和油箱的底部均设置有自封闭加液口组件,所述机架的下方配合设置有分离式自动加注装置,分离式自动加注装置包括个立式加注插管、个加注泵和个储液箱。
本发明通过改进在此提供一种智能无人机,与现有技术相比,具有如下改进及优点:
其一,本发明中,通过气能利用组件能够同时利用发动机排放尾气的流动动能和温度热能,其中尾气的流动动能能够转化为对喷洒箱加压的动力,让喷洒箱无需设置单独的动力泵即可运作,而尾气的温度热能能够对喷射前的药液进行预热,防止药液低温凝结,而造成的喷洒不均匀,无需设置单独的加热机构,从而能极大的减少能源消耗,让无人机在植保工作中拥有更长的续航。
其二,本发明中,通过风动旋撒组件能够实现对颗粒物质的自动喷洒,如固体化肥颗粒和小颗粒种子等,利用风力旋撒,无需主动的旋撒动力设备,可极大的减少能源消耗,提高无人机续航。
其三,本发明中,通过自封闭加液口组件的结构能够让喷洒箱被注射加液时自动打开,加液完成后自动封闭,自封闭加液口组件配合分离式自动加注装置,能够实现无人机的自动加液,更加方便。
其四,本发明中,排气管排出的尾气冲击能够带动涡轮旋转,涡轮通过传动轴带动柱塞泵的柱塞泵主轴转动,实现对尾气排放动能的利用,将尾气流动动能转化为柱塞泵的动力,利用该动立能够对喷洒箱内腔不断加压,通过加压促使喷洒箱内部液体喷洒而出。
其五,本发明中,传输管通过二位三通导向阀与换热排放管和直接排放管连接,能够实现尾气排放通道的灵活切换,当尾气进入直接排放管时能够直接排出,而当尾气进入换热排放管时,由于换热排放管与喷液管螺旋缠绕配合,实现两者的紧密连接,且具有极大的接触面积,让换热排放管的热能能够高效的向喷液管传递,达到在水液喷射前进行预热的效果。
其六,本发明中,二位三通控制阀能够控制排气管与涡壳的直接连通或者与传输管的直接连通,当排气管与涡壳连通时,则涡轮组件能够自动运行,而当排气管与传输管直接连通时,则排气管排出的尾气不经过涡轮组件,涡轮组件能够停止运行,实现自动控制水液喷洒的启动和停止。
其七,本发明中,当需要喷洒颗粒物质时,电缸通过伸缩带动推拉架下移,推拉架再通过中心轴能够带动风动旋撒组件的整体向下移动,当叶轮下移至喷洒箱底部凸沿的下方时,如图中所示,则喷洒箱内部的颗粒物质能够从支撑环中间向下落到旋叶上,叶轮在风力下能够自动旋转,且舵叶的结构让叶轮能够自动转向面对风向,叶轮再通过垂直传动齿轮组带动旋叶旋转,能够实现利用风力对颗粒物质的自动旋转播撒。
其八,本发明中,当喷洒箱需要加注药液时,无人机体降落至分离式自动加注装置顶部,喇叭状结构的导向定位槽能够对机架的下落位置导向,辅助机架下落至准确位置,促使立式加注插管与自封闭加液口组件的对接,自封闭加液口组件中间的塞子由回位弹簧支撑,能够将隔板中间的通孔顶住堵塞,由于回位弹簧具有弹性,在立式加注插管插入隔板中间的通孔时,塞子能够被顶开回缩,让隔板中间的通孔被打开,进而能够加注液体,而当塞子失去顶压作用力时,在回位弹簧的弹力作用下,塞子能够自动顶入隔板中间的通孔,将通孔堵塞封闭,当机架完全落在导向定位槽上时,立式加注插管能够正好对接插入自封闭加液口组件内,然后加注泵启动,将储液箱内的药液加注至喷洒箱内,能够实现自动加注药。
其九,本发明中,缓冲筒能够在喷洒箱内水液晃动时起到,将水液的整体流动分割为若干小份的流动,从而可极大的减小水液晃动对无人机的冲击。
附图说明
下面结合附图和实施例对本发明作进一步解释:
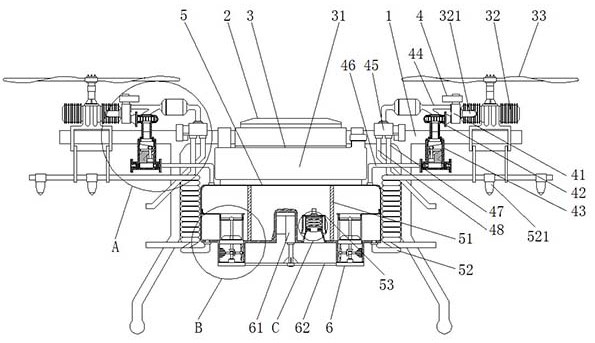
图1为本发明的正视图;
图2为本发明的图1中A处放大结构示意图;
图3为本发明的图1中B处放大结构示意图;
图4为本发明的图1中C处放大结构示意图;
图5为本发明的俯视图;
图6为本发明的喷洒箱内部结构俯视图;
图7为本发明的喷洒箱与喷液管连接孔分布结构图;
图8为本发明的旋叶俯视图;
图9为本发明的推拉架俯视图;
图10为本发明的圆筒正视图;
图11为本发明的无人机主体和分离式自动加注装置配合状态正视图;
图12为本发明的图11中C处放大结构示意图;
图13为本发明的导向定位槽俯视图;
图14为本发明的风动旋撒组件工作状态正视图;
图15为本发明的实施例2中涡轮组件和柱塞泵连接结构正视图;
图16为本发明的实施例2中传动轴和传动套筒剖视图;
图17为本发明的实施例4中喷洒箱、油箱和分离式自动加注装置配合结构正视图。
附图标记说明:
1、机架,2、飞控系统,3、动力系统,31、油箱,32、发动机,321、排气管,33、旋翼,34、气能利用组件,41、二位三通控制阀,42、涡轮组件,421、涡轮,422、涡壳,423、传动轴,424、传动套筒,425、推拉环,426、推拉杆,427、支撑销轴,428、推拉缸,429、上摩擦片,43、柱塞泵,431、柱塞泵主轴,432、下摩擦片,44、传输管,45、二位三通导向阀,46、加压管,47、换热排放管,48、直接排放管,49、三元催化器,5、喷洒箱,51、缓冲筒,52、喷液管,521、雾化喷头,53、自封闭加液口组件,531、圆筒,532、隔板,533、筒罩,534、滑杆,535、回位弹簧,536、塞子,6、风动旋撒组件,61、电缸,62、推拉架,63、立杆,64、旋叶,65、中心轴,66、垂直传动齿轮组,67、横轴,68、叶轮,69、阀板,610、支撑环,611、密封盘,612、舵叶,613、连杆,614、旋转节,7、分离式自动加注装置,71、立式加注插管,72、导向定位槽,73、输送管,74、加注泵,75、动力底座,751、动力轮,76、储液箱。
具体实施方式
下面将结合附图1至图17对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
本发明通过改进在此提供一种智能无人机,如图1-图17所示,一种智能无人机,包括机架1,所述机架1上设置有飞控系统2、动力系统3和喷洒箱5,其中动力系统3包括油箱31、若干个发动机32和旋翼33,所述机架1上安装有若干个气能利用组件4,气能利用组件4与发动机32的排气管321连接,且气能利用组件4与喷洒箱5连接,并且气能利用组件4与喷洒箱5一侧的喷液管52配合连接,所述喷洒箱5的底部设置有自封闭加液口组件53,且喷洒箱5的底部设置有风动旋撒组件6。
通过气能利用组件4能够同时利用发动机32排放尾气的流动动能和温度热能,其中尾气的流动动能能够转化为对喷洒箱5加压的动力,让喷洒箱5无需设置单独的动力泵即可运作,而尾气的温度热能能够对喷射前的药液进行预热,防止药液低温凝结,而造成的喷洒不均匀,无需设置单独的加热机构,从而能极大的减少能源消耗,让无人机在植保工作中拥有更长的续航;
通过风动旋撒组件6能够实现对颗粒物质的自动喷洒,如固体化肥颗粒和小颗粒种子等,利用风力旋撒,无需主动的旋撒动力设备,可极大的减少能源消耗,提高无人机续航;
通过自封闭加液口组件53的结构能够让喷洒箱5被注射加液时自动打开,加液完成后自动封闭,自封闭加液口组件53配合分离式自动加注装置7,能够实现无人机的自动加液,更加方便。
所述气能利用组件4包括传输管44、涡轮组件42和柱塞泵43,所述传输管44的一端与排气管321的出口连接,所述涡轮组件42设置于传输管44靠近排气管321的一端,所述涡轮组件42包括涡轮421、涡壳422和传动轴423,且涡壳422的一侧连接有柱塞泵43的一侧,柱塞泵43一端的柱塞泵主轴431与传动轴423的一端连接,且柱塞泵43的出口通过加压管46连接有喷洒箱5的顶部,加压管46的两端均通过管道连接件固定连接;排气管321排出的尾气冲击能够带动涡轮421旋转,涡轮421通过传动轴423带动柱塞泵43的柱塞泵主轴431转动,实现对尾气排放动能的利用,将尾气流动动能转化为柱塞泵43的动力,利用该动立能够对喷洒箱5内腔不断加压,通过加压促使喷洒箱5内部液体喷洒而出;
所述传输管44的中部安装有三元催化器49;三元催化器49能够分解发动机32的尾气,减少尾气喷洒至植物上造成的污染。
所述传输管44远离排气管321的一端连接有二位三通导向阀45的进口,二位三通导向阀45可以是手动阀也可以是电动阀,一般情况下,操作者可以预先明确是否需要对水液进行加热,所以设置手动阀即可,二位三通导向阀45的两个出口分别连接有换热排放管47和直接排放管48的一端,换热排放管47的中部与喷液管52螺旋缠绕配合连接;通过二位三通导向阀45能够实现尾气排放通道的灵活切换,当尾气进入直接排放管48时能够直接排出,而当尾气进入换热排放管47时,由于换热排放管47与喷液管52螺旋缠绕配合,实现两者的紧密连接,且具有极大的接触面积,让换热排放管47的热能能够高效的向喷液管52传递,达到在水液喷射前进行预热的效果。
所述传输管44靠近排气管321的一端为“Y”形结构,且该“Y”形结构的一端连接有涡壳422的出口,涡壳422与传输管44通过螺丝固定连接,涡壳422的进口和“Y”形结构的另一端分别连接有二位三通控制阀41的两个出口,二位三通控制阀41的进口与排气管321的出口连接,二位三通控制阀41具体为二位三通电磁阀,能够自动控制;二位三通控制阀41能够控制排气管321与涡壳422的直接连通或者与传输管44的直接连通,当排气管321与涡壳422连通时,则涡轮组件42能够自动运行,而当排气管321与传输管44直接连通时,则排气管321排出的尾气不经过涡轮组件42,涡轮组件42能够停止运行,实现自动控制水液喷洒的启动和停止。
实施例2:
本发明通过改进在此提供一种智能无人机,如图1-图17所示,一种智能无人机,包括机架1,所述机架1上设置有飞控系统2、动力系统3和喷洒箱5,其中动力系统3包括油箱31、若干个发动机32和旋翼33,所述机架1上安装有若干个气能利用组件4,气能利用组件4与发动机32的排气管321连接,且气能利用组件4与喷洒箱5连接,并且气能利用组件4与喷洒箱5一侧的喷液管52配合连接,所述喷洒箱5的底部设置有自封闭加液口组件53,且喷洒箱5的底部设置有风动旋撒组件6。
所述气能利用组件4包括传输管44、涡轮组件42和柱塞泵43,所述传输管44的一端与排气管321的出口连接,所述涡轮组件42设置于传输管44靠近排气管321的一端,所述涡轮组件42包括涡轮421、涡壳422和传动轴423,且涡壳422的一侧连接有柱塞泵43的一侧,柱塞泵43一端的柱塞泵主轴431与传动轴423的一端连接,且柱塞泵43的出口通过加压管46连接有喷洒箱5的顶部,加压管46的两端均通过管道连接件固定连接;
所述传输管44的中部安装有三元催化器49。
所述传动轴423靠近柱塞泵主轴431的一端滑动套设有传动套筒424的一端,传动套筒424的内壁设有条形槽,传动轴423的外壁设有条形凸起,条形凸起与条形槽相配合,实现传动轴423和传动套筒424的滑动配合,传动套筒424外转动套设有推拉环425,此处两者可通过轴承转动连接,推拉环425的一侧铰接有推拉杆426的一端,推拉杆426的中部通过支撑销轴427与涡壳422活动连接,支撑销轴427固定设置于涡壳422一侧的通孔中,推拉杆426的中部设有条形孔,支撑销轴427位于推拉杆426的条形孔中,且推拉杆426突出涡壳422外的一端铰接有推拉缸428的一端,推拉缸428可以是液压缸、气缸或者电缸,推拉缸428的另一端与柱塞泵43的外壁铰接,所述传动套筒424和柱塞泵主轴431相靠近的一端分别对应设置有上摩擦片429和下摩擦片432;通过推拉缸428的伸缩,能够带动传动套筒424的上下运动,利用传动套筒424底部的上摩擦片429与柱塞泵主轴431顶部的下摩擦片432的摩擦接触或者分离,能够实现对柱塞泵43启动和停止的控制。
本实施例2与实施例1的区别在于,柱塞泵43的启停通过推拉缸428自动控制,无需设置二位三通控制阀41和复杂的管路,本实施例2中的结构如图15-16中所示。
实施例3:
本发明通过改进在此提供一种智能无人机,如图1-图17所示,一种智能无人机,包括机架1,所述机架1上设置有飞控系统2、动力系统3和喷洒箱5,其中动力系统3包括油箱31、若干个发动机32和旋翼33,所述机架1上安装有若干个气能利用组件4,气能利用组件4与发动机32的排气管321连接,且气能利用组件4与喷洒箱5连接,并且气能利用组件4与喷洒箱5一侧的喷液管52配合连接,所述喷洒箱5的底部设置有自封闭加液口组件53,且喷洒箱5的底部设置有风动旋撒组件6。
所述喷洒箱5的底部一侧开设有出口孔,该出口孔连接有喷液管52的一端,喷液管52的另一端设置有雾化喷头521,所述喷洒箱5的底部设置有自封闭加液口组件53,自封闭加液口组件53包括圆筒531、隔板532、筒罩533、滑杆534、回位弹簧535和塞子536,所述圆筒531的底部与喷洒箱5的底边连接,圆筒531和喷洒箱5设置为一体结构,且圆筒531的中间横向设置有隔板532,隔板532与圆筒531为一体结构,隔板532的中间开设有通孔,该通孔内契合设置有塞子536,塞子536的顶部通过回位弹簧535连接有圆筒531的顶部,回位弹簧535的两端通过卡接固定,且圆筒531对应隔板532上方位置的侧壁上开设有通孔;塞子536由回位弹簧535支撑,能够将隔板532中间的通孔顶住堵塞,由于回位弹簧535具有弹性,在立式加注插管71插入隔板532中间的通孔时,塞子536能够被顶开回缩,让隔板532中间的通孔被打开,进而能够加注液体,而当塞子536失去顶压作用力时,在回位弹簧535的弹力作用下,塞子536能够自动顶入隔板532中间的通孔,将通孔堵塞封闭;
所述圆筒531的顶部罩设有筒罩533,筒罩533的内壁和圆筒531的内壁之间设有空隙;筒罩533与圆筒531焊接为一体,其能够将圆筒531的四周遮挡形成环形通道,减少塞子536处受到的水液压力;
所述回位弹簧535的中间穿设有滑杆534,滑杆534的一端与塞子536固定连接,且滑杆534的另一端穿过圆筒531和筒罩533的顶部,滑杆534与圆筒531和筒罩533滑动配合;滑杆534能够对回位弹簧535进行限位和导向,防止回位弹簧535在形变过程中发生歪斜和扭曲。
所述喷洒箱5的中间设置有缓冲筒51,缓冲筒51的顶部和底部分别与喷洒箱5的顶部和底部固定连接,且缓冲筒51的侧壁上均匀开设有通孔;缓冲筒51能够在喷洒箱5内水液晃动时起到,将水液的整体流动分割为若干小份的流动,从而可极大的减小水液晃动对无人机的冲击。
所述风动旋撒组件6包括旋叶64、中心轴65、叶轮68、阀板69、密封盘611和舵叶612,所述密封盘611滑动设置于喷洒箱5底部的圆孔内,且密封盘611的中间贯穿有中心轴65,中心轴65与密封盘611转动连接,中心轴65位于密封盘611上方的部分连接有旋叶64的中间,旋叶64与中心轴65固定连接,且中心轴65位于密封盘611下方的部分上转动套设有旋转节614,旋转节614的一侧通过连杆613固定连接有舵叶612,且旋转节614的另一侧通过横轴67转动连接叶轮68的中部,横轴67通过垂直传动齿轮组66与中心轴65连接,垂直传动齿轮组66由横向的伞齿轮和竖向的伞齿轮,横向的伞齿轮固定在中心轴65上,而竖向的伞齿轮固定在横轴67上,实现横轴67和中心轴65的联动,所述密封盘611的顶部通过立杆63连接有支撑环610,立杆63与密封盘611和支撑环610均为焊接,支撑环610的一侧设置有阀板69,阀板69与支撑环610为一体结构,阀板69的位置与喷洒箱5连接喷液管52的出口孔位置相对应;常态下,风动旋撒组件6隐藏在喷洒箱5的底部,不会妨碍喷洒箱5的喷液功能;
喷洒箱5底部的圆孔的底部环绕设置有凸沿,且该凸沿的高度大于叶轮68的直径,所述凸沿的下方盖设有推拉架62,推拉架62的顶部与中心轴65的下端转动连接,且推拉架62的中间连接有电缸61的一端,电缸61的另一端与喷洒箱5的底部固定连接;电缸61的伸缩能够带动推拉架62上下位移,推拉架62通过中心轴65能够带动风动旋撒组件6的整体上下移动,当叶轮68下移至喷洒箱5底部凸沿的下方时,如图14中所示,阀板69能够将喷洒箱5连接喷液管52的出口孔堵住,喷洒箱5内部的颗粒物质能够从支撑环610中间向下落到旋叶64上,叶轮68在风力下能够自动旋转,且舵叶612的结构让叶轮68能够自动转向面对风向,叶轮68再通过垂直传动齿轮组66带动旋叶64旋转,能够实现利用风力对颗粒物质的自动旋转播撒。
所述机架1的下方配合设置有分离式自动加注装置7,如图11-13所示,分离式自动加注装置7包括立式加注插管71、导向定位槽72、输送管73、加注泵74、动力底座75、动力轮751和储液箱76,所述导向定位槽72的侧壁为喇叭状结构,且该喇叭状结构与机架1底部的结构相匹配,导向定位槽72的顶部可设置重力感应器,用于判断机架1是否落在导向定位槽72上,所述导向定位槽72的中间设置有立式加注插管71,立式加注插管71上端的结构与圆筒531和隔板532的结构相匹配,且立式加注插管71的下端通过输送管73和加注泵74连接有储液箱76,所述导向定位槽72、加注泵74和储液箱76的底部均连接有动力底座75,动力底座75的四角分别设置有动力轮751,动力轮751为电动轮;分离式自动加注装置7与无人机体能够相互配合,实现自动加液,喇叭状结构的导向定位槽72能够对机架1的下落位置导向,辅助机架1下落至准确位置,促使立式加注插管71与自封闭加液口组件53的对接,当机架1完全落在导向定位槽72上时,立式加注插管71能够正好对接插入自封闭加液口组件53内,然后加注泵74启动,将储液箱76内的药液加注至喷洒箱5内,能够实现自动加注药液,而且分离式自动加注装置7底部的动力底座75能够让分离式自动加注装置7自动位移,跟随无人机的工作区域自动位移至最佳加注药液的位置。
本实施例3与实施例1的区别在于喷洒箱5的底部通过回位弹簧535和塞子536自封闭,并配合分离式自动加注装置7进行自动加注药液,且通过缓冲筒51减少水液晃动,而且通过叶轮68和旋叶64的结构,能利用风力播撒颗粒物质。
实施例4:
本发明通过改进在此提供一种智能无人机,如图1-图17所示,一种智能无人机,包括机架1,所述机架1上设置有飞控系统2、动力系统3和喷洒箱5,其中动力系统3包括油箱31、若干个发动机32和旋翼33,所述机架1上安装有若干个气能利用组件4,气能利用组件4与发动机32的排气管321连接,且气能利用组件4与喷洒箱5连接,并且气能利用组件4与喷洒箱5一侧的喷液管52配合连接,所述喷洒箱5的底部设置有自封闭加液口组件53,且喷洒箱5的底部设置有风动旋撒组件6。
所述喷洒箱5和油箱31的底部均设置有自封闭加液口组件53,如图17中所示,所述机架1的下方配合设置有分离式自动加注装置7,分离式自动加注装置7包括2个立式加注插管71、2个加注泵74和2个储液箱76;喷洒箱5和油箱31的底部均设置自封闭加液口组件53,不仅能够实现药液的自动加注,且能够实现燃油的自动夹住,让无人机的工作更加自动化。
本实施例4与实施例1的区别在于不仅喷洒箱5能够自动加药,还有油箱31也能够自动加油,让无人机的工作更加自动化。
本发明的工作原理或者使用方法:初始状态时,无人机主体停留在分离式自动加注装置7上,如图11中所示,通过加注泵74的运行,能够将储液箱76内的药液抽出并注入喷洒箱5内,操作者通过启动飞控系统2和动力系统3驱动无人机主体飞行;
动力系统3运作过程中,发动机32的尾气通过排气管321排出至传输管44,排气管321排出的尾气冲击能够带动涡轮421旋转,涡轮421通过传动轴423带动柱塞泵43的柱塞泵主轴431转动,实现对尾气排放动能的利用,将尾气流动动能转化为柱塞泵43的动力,利用该动立能够对喷洒箱5内腔不断加压,通过加压促使喷洒箱5内部液体喷洒而出;
运行过程中,二位三通控制阀41能够控制排气管321与涡壳422的直接连通或者与传输管44的直接连通,当排气管321与涡壳422连通时,则涡轮组件42能够自动运行,而当排气管321与传输管44直接连通时,则排气管321排出的尾气不经过涡轮组件42,涡轮组件42能够停止运行,实现自动控制水液喷洒的启动和停止;
而且传输管44通过二位三通导向阀45与换热排放管47和直接排放管48连接,能够实现尾气排放通道的灵活切换,当尾气进入直接排放管48时能够直接排出,而当尾气进入换热排放管47时,由于换热排放管47与喷液管52螺旋缠绕配合,实现两者的紧密连接,且具有极大的接触面积,让换热排放管47的热能能够高效的向喷液管52传递,达到在水液喷射前进行预热的效果;
当需要喷洒颗粒物质时,电缸61通过伸缩带动推拉架62下移,推拉架62再通过中心轴65能够带动风动旋撒组件6的整体向下移动,当叶轮68下移至喷洒箱5底部凸沿的下方时,如图14中所示,则喷洒箱5内部的颗粒物质能够从支撑环610中间向下落到旋叶64上,叶轮68在风力下能够自动旋转,且舵叶612的结构让叶轮68能够自动转向面对风向,叶轮68再通过垂直传动齿轮组66带动旋叶64旋转,能够实现利用风力对颗粒物质的自动旋转播撒;
当喷洒箱5需要加注药液时,无人机体降落至分离式自动加注装置7顶部,喇叭状结构的导向定位槽72能够对机架1的下落位置导向,辅助机架1下落至准确位置,促使立式加注插管71与自封闭加液口组件53的对接,自封闭加液口组件53中间的塞子536由回位弹簧535支撑,能够将隔板532中间的通孔顶住堵塞,由于回位弹簧535具有弹性,在立式加注插管71插入隔板532中间的通孔时,塞子536能够被顶开回缩,让隔板532中间的通孔被打开,进而能够加注液体,而当塞子536失去顶压作用力时,在回位弹簧535的弹力作用下,塞子536能够自动顶入隔板532中间的通孔,将通孔堵塞封闭,当机架1完全落在导向定位槽72上时,立式加注插管71能够正好对接插入自封闭加液口组件53内,然后加注泵74启动,将储液箱76内的药液加注至喷洒箱5内,能够实现自动加注药。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种无人机智能电池电路及无人机电路系统及无人机
- 一种用于无人机测控的智能无人机天线装置