一种水泥库智能清理机器人用攀爬结构及其使用方法
文献发布时间:2023-06-19 11:50:46
技术领域
本发明一种水泥库智能清理机器人用攀爬结构及其使用方法涉及一种能够通过智能清理机器人对水泥库进行清理时使用的攀爬结构及其使用方法,属于水泥库清理技术领域。特别涉及一种通过液压推杆和滑动板相配合能够对滑动柱的位置进行调整,使得滑动柱和固定柱之间产生上下错位,以此能够便于对清壁履带车的位置进行调节,方便进行水泥库清壁处理的攀爬结构及其使用方法。
背景技术
水泥库是一种用以储存水泥的圆筒状构筑物,当水泥库内部的排尘由设备排尘能力不足时,会导致库内粉尘和湿空气不能被及时抽走,使得粉尘和湿空气结合在库壁内聚集,从而形成粘固的结壁,导致水泥库的存储量缩减,甚至会被放库时的水泥冲刷下来,堵塞下料口,而目前为了降低人工清理的难度会在水泥库内安装架设大型的清壁机构进行专门清理,但是这种清理结构受水泥库内部庞大空间影响,需要配备长行程的位移机构来为清壁机构提供自由移动,成本造价高昂,机构占用空间大。
公告号CN211971111U公开了一种水泥库清库装置,该清库装置包括旋转支撑机构、动力机构、伸缩支撑机构以及破碎机构,所述旋转支撑机构包括安装在水泥库顶部上的中空旋转平台,安装在中空旋转平台的旋转台面上的支撑顶板,以及设置在中空旋转平台的中空腔内的支撑杆,该清库装置为了保证对整个水泥库体提供有效清理设置了长距离的支撑臂等行程机构,装置体积大占用空间多,安装架设的成本高昂。
公告号CN210000936U公开了一种外接电源式水泥库在线清库装置,属于水泥库清理设备领域,包括设有清理面的用于清理水泥库库壁挂料的清理机构、用于带动所述清理机构沿水泥库库壁上下移动的升降机构、以及用于带动所述清理机构、升降机构沿水泥库库壁做圆周运动的行走机构,该清库装置体积大占用空间多,安装架设的成本高昂。
发明内容
为了改善上述情况,本发明一种水泥库智能清理机器人用攀爬结构及其使用方法提供了一种通过液压推杆和滑动板相配合能够对滑动柱的位置进行调整,使得滑动柱和固定柱之间产生上下错位,以此能够便于对清壁履带车的位置进行调节,方便进行水泥库清壁处理的攀爬结构及其使用方法。
本发明一种水泥库智能清理机器人用攀爬结构是这样实现的:本发明一种水泥库智能清理机器人用攀爬结构由液压推杆、连接座、水泥库主体、固定柱、固定滑轨、固定座、挡板、滑动板和滑动柱组成,固定滑轨的两端通过固定座分别置于水泥库主体的两端内壁上,滑动板置于固定滑轨的内部,两个液压推杆的一端分别置于水泥库主体的两端上,两个液压推杆的另一端分别延伸至固定滑轨的两端内部,两个液压推杆的另一端分别延伸至固定滑轨的两端内部,连接座置于液压推杆的另一端上,且和滑动板相对应,多个滑动柱等距置于滑动板上,滑动柱的端部上置有限位板,所述限位板横断面为圆形,所述滑动柱上开有导向槽,所述导向槽为弧形槽,多组固定柱固定置于水泥库主体的内壁上,多组固定柱和多个滑动柱一一对应,且相齐平,同组固定柱沿水泥库主体的内壁等角度分布,固定柱的端部上置有挡板,所述挡板的横断面为圆形,同组所述固定柱上的挡板和限位板相配合形成圆周面,液压推杆上置有控制板,所述控制板上置有无线信号收发器、信号转换器、数据处理装置、控制器,所述无线信号收发器通过数据传输线和信号转换器信号连接,所述信号转换器通过数据传输线和数据处理装置信号连接,所述数据处理装置通过数据传输线和控制器信号连接,所述控制器通过数据传输线和液压推杆信号连接;
本发明一种水泥库智能清理机器人用攀爬结构的使用方法,其特征在于包括以下步骤:
1)多组的固定柱和相对应的滑动柱相配合形成多个高度不同的轨道环面,带有清理机构的清壁履带车能够沿着轨道环面进行贴壁移动,使得清壁履带车上的清理机构对水泥库壁进行清理;
2)当清壁履带车需要进行爬到上层轨道环或下降到下层轨道环时,通过外部控制系统对控制板上的无线信号收发器发送控制指令,无线信号收发器接收到信号,并且将信号传递给信号转换器,信号转换器对接收到的信号进行模数转换,然后将数字信号传递给数据处理装置,数据处理装置根据内部存储的计算机可度存储介质进行数据处理,通过控制器控制液压推杆启动,压推杆进行伸缩,以此推动滑动板在固定轨道内进行滑移;
3)滑动板进行移动使得滑动板上对应的多个滑动柱与相邻一组固定柱之间产生上下错位,从而产生斜面轨道,以此使得清壁履带车在经过时会沿着错位的斜面轨道移动到上一层或者下一层轨道环上继续进行沿壁清理水泥库壁面。
有益效果。
一、方便在水泥库内进行安装架设轨道,安装难度低。
二、设备占用空间小,成本较低,方便进行水泥库的清壁处理。
三、能够沿壁进行自由攀爬清理,清理效果好。
四、结构简单,方便实用。
五、成本低廉,便于推广。
附图说明
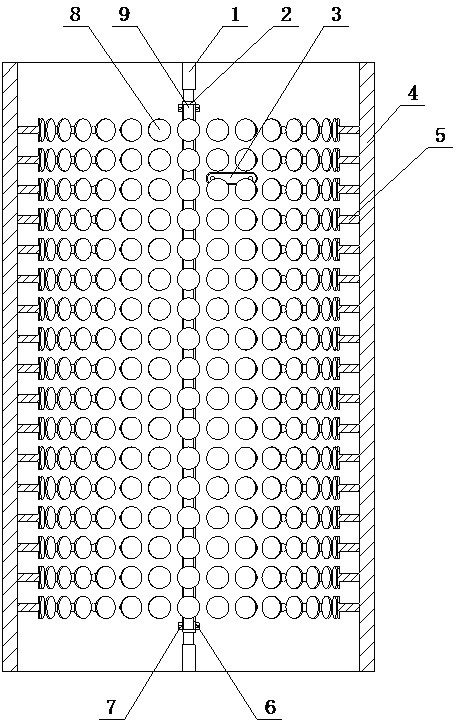
图1本发明一种水泥库智能清理机器人用攀爬结构的结构示意图;
图2本发明一种水泥库智能清理机器人用攀爬结构的俯视图;
图3本发明一种水泥库智能清理机器人用攀爬结构的立体结构图;
图4本发明一种水泥库智能清理机器人用攀爬结构清壁履带车下降时的结构示意图;
图5本发明一种水泥库智能清理机器人用攀爬结构实施例2的结构示意图。
附图中
其中为:液压推杆(1),连接座(2),清壁履带车(3),水泥库主体(4),固定柱(5),固定滑轨(6),固定座(7),挡板(8),滑动板(9),滑动柱(10)。
具体实施方式:
实施例1
本发明一种水泥库智能清理机器人用攀爬结构是这样实现的,由液压推杆(1)、连接座(2)、水泥库主体(4)、固定柱(5)、固定滑轨(6)、固定座(7)、挡板(8)、滑动板(9)和滑动柱(10)组成,固定滑轨(6)的两端通过固定座(7)分别置于水泥库主体(4)的两端内壁上,滑动板(9)置于固定滑轨(6)的内部,两个液压推杆(1)的一端分别置于水泥库主体(4)的两端上,两个液压推杆(1)的另一端分别延伸至固定滑轨(6)的两端内部,两个液压推杆(1)的另一端分别延伸至固定滑轨(6)的两端内部,连接座(2)置于液压推杆(1)的另一端上,且和滑动板(9)相对应,多个滑动柱(10)等距置于滑动板(9)上,滑动柱(10)的端部上置有限位板,所述限位板横断面为圆形,所述滑动柱(10)上开有导向槽,所述导向槽为弧形槽,多组固定柱(5)固定置于水泥库主体(4)的内壁上,多组固定柱(5)和多个滑动柱(10)一一对应,且相齐平,同组固定柱(5)沿水泥库主体(4)的内壁等角度分布,固定柱(5)的端部上置有挡板(8),所述挡板(8)的横断面为圆形,同组所述固定柱(5)上的挡板(8)和限位板相配合形成圆周面,液压推杆(1)上置有控制板,所述控制板上置有无线信号收发器、信号转换器、数据处理装置、控制器,所述无线信号收发器通过数据传输线和信号转换器信号连接,所述信号转换器通过数据传输线和数据处理装置信号连接,所述数据处理装置通过数据传输线和控制器信号连接,所述控制器通过数据传输线和液压推杆(1)信号连接;
所述无线信号收发器能够接收外部控制系统的信号,并且进行信号转换;
所述信号转换器能够接收无线信号收发器的信号,并且进行信号转换;
所述数据处理装置和信号转换器进行信息交互,所述数据处理装置内存储有计算机可读存储介质;
该计算机可读存储介质被执行时实现以下步骤:对接收到外部信号进行数据处理,并且将处理的信息传递给控制器,给控制器发送执行指令;
所述控制器和数据处理装置进行信息交互,且能够控制液压推杆(1)进行伸缩;
数据处理装置由处理组件和存储器组成;
处理组件控制数据处理装置的整体操作;
处理组件可以包括一个或至少两个处理器来执行指令,以完成上述的方法的全部或部分步骤;
存储器被配置为存储各种类型的数据以支持数据处理装置的操作。
存储器可以由任何类型的易失性或非易失性存储设备或者它们的组合实现,如静态随机存取存储器(SRAM),电可擦除可编程只读存储器(EEPROM),可擦除可编程只读存储器(EPROM),可编程只读存储器(PROM),只读存储器(ROM),磁存储器,快闪存 储器,磁盘或光盘。
所述信号转换器为目前通用的将电信号转化成数字信号转换器。
控制器可以被一个或至少两个应用专用集成电路(ASIC)、可编程逻辑器件(PLD)、现场可编程门阵列(FPGA)、控制器、微控制器、微处理器或其他电子组件实现,用于执行数据处理装置的指令;
本发明一种水泥库智能清理机器人用攀爬结构的使用方法步骤如下:
1)多组的固定柱(5)和相对应的滑动柱(10)相配合形成多个高度不同的轨道环面,带有清理机构的清壁履带车(3)能够沿着轨道环面进行贴壁移动,使得清壁履带车(3)上的清理机构对水泥库壁进行清理;
2)当清壁履带车(3)需要进行爬到上层轨道环或下降到下层轨道环时,通过外部控制系统对控制板上的无线信号收发器发送控制指令,无线信号收发器接收到信号,并且将信号传递给信号转换器,信号转换器对接收到的信号进行模数转换,然后将数字信号传递给数据处理装置,数据处理装置根据内部存储的计算机可度存储介质进行数据处理,通过控制器控制液压推杆(1)启动,液压推杆(1)进行伸缩,以此推动滑动板(9)在固定轨道内进行滑移;
3)滑动板(9)进行移动使得滑动板(9)上对应的多个滑动柱(10)与相邻一组固定柱(5)之间产生上下错位,从而产生斜面轨道,以此使得清壁履带车(3)在经过时会沿着错位的斜面轨道移动到上一层或者下一层轨道环上继续进行沿壁清理水泥库壁面。
实施例2:
本实施例和实施例1的区别为:所述固定滑轨(6)的数量为两个;使用时,能够通过两个固定滑轨(6)相配合,扩大清壁履带车(3)升降时的挪移空间,降低清壁履带车(3)升降时的难度;
同组所述固定柱(5)上的挡板(8)和限位板相配合形成圆周面的设计,能够形成高度不同的轨道环面,对清壁履带车(3)进行承托,使得清壁履带车(3)能够沿着轨道环面进行贴壁清理;
所述限位板横断面为圆形,所述挡板(8)的横断面为圆形的设计,能够对清壁履带车(3)进行限位,避免清壁履带车(3)在清理的过程中从轨道环面上滑落;
所述滑动柱(10)上开有导向槽的设计,当固定柱(5)和滑动柱(10)之间产生上下错位时,导向槽能够对清壁履带车(3)进行导向,避免清壁履带车(3)和滑动柱(10)之间卡顿;
所述导向槽为弧形槽的设计,能够进一步的对清壁履带车(3)进行导向;
所述液压推杆(1)和滑动板(9)相配合对滑动柱(10)进行推动的设计,能够使得滑动柱(10)和对应齐平的固定柱(5)之间产生上下错位,从而能够通过产生的斜面轨道对清壁履带车(3)的位置进行移动,以此能够对水泥库壁面进行逐层清理;
多组的固定柱(5)和相对应的滑动柱(10)相配合形成多个高度不同的轨道环面的设计,能够使得清壁履带车(3)能够对水泥库壁面进行层级反复清理,清理效果好;
达到通过液压推杆(1)和滑动板(9)相配合能够对滑动柱(10)的位置进行调整,使得滑动柱(10)和固定柱(5)之间产生上下错位,以此能够便于对清壁履带车(3)的位置进行调节,方便进行水泥库清壁处理的目的。
上述实施例为本发明的较佳实施例,并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许的改进,即凡是依照本发明所做的同等改进,应为本发明的范围所涵盖。
需要进一步指出的是,上述具体实施例在描述的时候,为了简单明了,仅仅描述了与其他实施例之间的区别,但是本领域技术人员应该知晓,上述具体实施例本身也是独立的技术方案。
- 一种水泥库智能清理机器人用攀爬结构及其使用方法
- 一种智能攀爬机器人及使用方法