一种用于温室大棚的无人机路径规划方法、系统及无人机
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及无人机路径规划技术领域,尤其涉及一种用于温室大棚的无人机路径规划方法、系统及无人机。
背景技术
温室大棚栽培植物是现代化农业中常用的一种技术,现有技术中,温室大棚中植物的农药以及水等液体的喷洒工作主要由人工进行,消耗了大量的人力,人力成本较高,且自动化程度较低。
为了解决上述问题,目前有采用有如下几种方案,例如无人机进行农药或者水的喷洒,但是无人机进行喷洒的过程中,还是需要人为参与,人为控制,防止无人机碰撞到温室大棚内的植物或者障碍物上;或者安装一个固定的飞行轨道,控制无人机按照飞行轨道进行农药或者水的喷洒。然而上述方法,还是会浪费人力,并且在飞行过程中人为操作占比很大,自动化程度较低,智能化低;而采用固定飞行轨道的方式,成本又很高,当种植的作物发生变化时,无人机的飞行路线没有办法改变,需要进行喷洒需要的液体时,还要更换飞行轨道,因此成本较高。同时,现有的无人机电池通常为内置的不可拆卸,当无人机电量耗尽后需等待充电结束后才能继续使用。
因此要解决目前温室大棚内如何智能化,自动化的去控制无人机进行相应的喷洒或者监控工作,同时又提供一种便于更换电池的无人机。
发明内容
本发明要解决的技术问题是可靠性高的无人机在温室大棚内避开障碍物并与种植的植物保持一定高度的飞行后,能选择最佳路线对温室大棚内的蔬菜进行施肥、喷洒农药以及监控的问题。为了解决上述问题,本发明提出了一种用于温室大棚的无人机路径规方法及系统。本发明具体是以如下技术方案实现的:一种用于温室大棚的无人机路径规划方法,包括步骤:
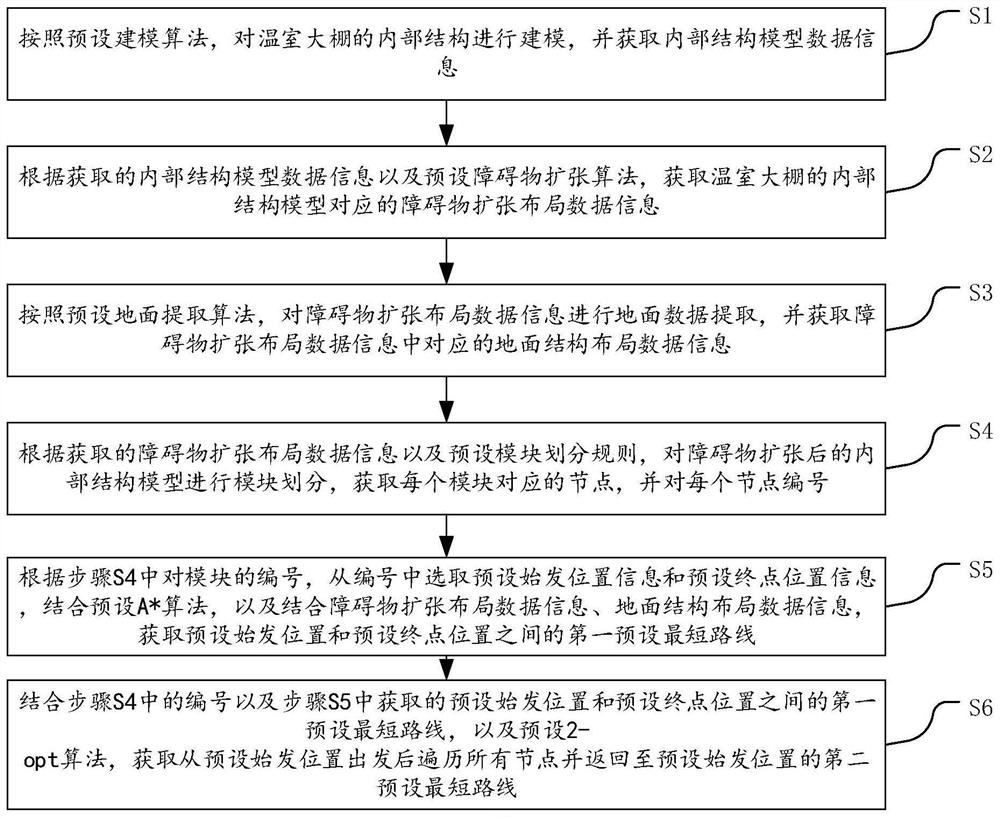
S1:按照预设建模算法,对温室大棚的内部结构进行建模,并获取内部结构模型数据信息;
S2:根据获取的内部结构模型数据信息以及预设障碍物扩张算法,获取温室大棚的内部结构模型对应的障碍物扩张布局数据信息;
S3:按照预设地面提取算法,对障碍物扩张布局数据信息进行地面数据提取,并获取障碍物扩张布局数据信息中对应的地面结构布局数据信息;
S4:根据获取的障碍物扩张布局数据信息以及预设模块划分规则,对障碍物扩张后的内部结构模型进行模块划分,获取每个模块对应的节点,并对每个节点编号;
S5:根据步骤S4中对模块的编号,从编号中选取预设始发位置信息和预设终点位置信息,结合预设A*算法,以及结合障碍物扩张布局数据信息、地面结构布局数据信息,获取预设始发位置和预设终点位置之间的第一预设最短路线;
S6:结合步骤S4中的编号以及步骤S5中获取的预设始发位置和预设终点位置之间的第一预设最短路线,以及预设2-opt算法,获取从预设始发位置出发后遍历所有节点并返回至预设始发位置的第二预设最短路线。
进一步地,步骤S2根据预设障碍物扩张算法获取障碍物扩张布局数据信息具体包括步骤:
S21:获取无人机对应的三维数据信息;
S22:根据获取的无人机对应的长度数据信息、宽度数据信息以及高度数据信息,对温室大棚的内部结构的预设初始结构布局数据信息进行扩张,获取温室大棚内部结构的障碍物扩张布局数据信息。
进一步地,步骤S22中具体包括步骤:
S221:根据获取的无人机的宽度信息,对预设初始结构布局数据信息进行宽度扩张;
S222:根据获取的无人机的高度信息,按照预设高度扩张算法,对步骤S221中进行宽度扩张后的数据进行高度扩张,并将扩张后的数据信息减去一个余量系数;
S223:根据步骤S222中减去余量系数的扩张后的数据获取扩张结构布局数据信息,并储存至后台服务器。
进一步地,步骤S3中对障碍物扩张布局数据信息进行地面数据提取,并获取障碍物扩张布局数据信息中对应的地面结构布局数据信息具体
包括步骤:
S31:对温室大棚的内部结构进行空间水平面分割,并获取温室大棚内部结构的水平面数据信息;
S32:获取水平面数据信息中的预设底面数据信息;
S33:按照预设洪水填充算法,从温室大棚的预设底面开始向多个预设方向进行扩展,并按照预设步长值进行扩展;
S34:根据扩展后的障碍物对应的赋予值,并按照预设比对算法,提取温室大棚内部结构的预设地面数据信息。
进一步地,步骤S5和步骤S4之间还包括距离变换算法,具体包括步骤:
A1:根据预设距离变换算法获取温室大棚的内部结构模型对应的距离矩阵;所述距离矩阵中的预设位置点的值为该位置距离温室大棚的内部结构的预设高度平面的预设最小距离值;
A2:对温室大棚的内部结构模型中的空白空间赋值无穷大,对温室大棚的内部结构模型中的预设地面赋值为a,对温室大棚的内部结构模型中的预设障碍物赋值为b。
进一步地,步骤S5中通过预设A*算法获取预设始发位置和预设终点位
置之间的最短距离,包括步骤:
S51:通过预设估计代价函数获取预设始发位置和预设终点位置之间的预设第一路径,其中预设估计代价函数为:
f(n)=g(n)+h(n)
其中g(n)为预设初始位置到当前点位置的距离估计代价;
h(n)为预设初始位置到预设终点位置的距离代价值;
F(n)为预设初始位置经过当前点位置到预设终点位置的距离估计代价;
其中h(n)的计算公式为:
其中(Xend、Yend、Yend)为预设终点位置的三维坐标,(Xn、Yn、Zn)为当前点位置的三维坐标。
S52:根据步骤S51计算的预设初始位置至预设终点位置的路线数据信息,结合预设距离变换算法获取的温室大棚的内部结构的距离矩阵数据信息,获取无人机在预设初始位置至预设终点位置之间,保持预设扩张宽度的第二预设最短距离。
一种用于温室大棚的无人机路径规划系统,包括:
建模模块,用于按照预设建模算法,对温室大棚的内部结构进行建模,并获取内部结构模型数据信息;
障碍物扩张模块,用于根据获取的内部结构模型数据信息以及预设障碍物扩张算法,获取温室大棚的内部结构模型对应的障碍物扩张布局数据信息;
地面提取模块,用于按照预设地面提取算法,对障碍物扩张布局数据信息进行地面数据提取,并获取障碍物扩张布局数据信息中对应的地面结构布局数据信息;
节点编号模块,用于根据获取的障碍物扩张布局数据信息以及预设模块划分规则,对障碍物扩张后的内部结构模型进行模块划分,获取每个模块对应的节点,并对每个节点编号;
获取预设两点距离模块,从编号中选取预设始发位置信息和预设终点位置信息,结合预设A*算法,以及结合障碍物扩张布局数据信息、地面结构布局数据信息,获取预设始发位置和预设终点位置之间的第一预设最短路线;
获取遍历最佳路线模块,用于根据预设2-opt算法,获取从预设始发位置出发后遍历所有节点并返回至预设始发位置的第二预设最短路线。
进一步地,所述障碍物扩张模块包括:
获取三维数据单元,用于获取无人机对应的三维数据信息;
障碍物扩张布局单元,用于根据获取的无人机对应的长度数据信息、宽度数据信息以及高度数据信息,对温室大棚的内部结构的预设初始结构布局数据信息进行扩张,获取温室大棚内部结构的障碍物扩张布局数据信息。
进一步地,所述障碍物扩张布局单元包括:
宽度扩张单元,用于根据获取的无人机的宽度信息,对预设初始结构布局数据信息进行宽度扩张;
高度扩张单元,用于根据获取的无人机的高度信息,按照预设高度扩张算法,对进行宽度扩张后的数据进行高度扩张,并将扩张后的数据信息减去一个余量系数;
获取扩张数据单元,用于减去余量系数的扩张后的数据获取扩张结构布局数据信息,并储存至后台服务器。
进一步地,所述地面提取模块包括:
水平面分割单元,用于对温室大棚的内部结构进行空间水平面分割,并获取温室大棚内部结构的水平面数据信息,并获取水平面数据信息中的预设底面数据信息;
扩展单元,用于按照预设洪水填充算法,从温室大棚的预设底面开始向多个预设方向进行扩展,并按照预设步长值进行扩展;
获取地面数据信息单元,用于根据扩展后的障碍物对应的赋予值,并按照预设比对算法,提取温室大棚内部结构的预设地面数据信息。
采用上述技术方案,本发明至少有如下有益效果:
(1)本用于温室大棚的无人机路径规划方法,能够根据温室大棚的内部结构进行相应建模,从而根据建立的温室大棚的室内结构模型进行无人机的路径规划,本路径规划方法,能够不限于一个温室大棚的使用,基于有内部结构数据的建筑物都可进行无人机路径规划之前的内部结构模型建立。
(2)本用于温室大棚的无人机路径规划方法,会根据无人机的尺寸对建立的温室大棚的内部结构模型进行障碍物扩张,从而实现无人机在飞行过程中不会撞击到障碍物。
(3)本用于温室大棚的无人机路径规划方法,会对温室大棚内部的水平面进行分割,并提取所述水平面中的地面,所述地面包括地平面和楼梯台阶平面,从而能规划无人机进行高度方向的飞行调节。
(4)本用于温室大棚的无人机路径规划方法,对温室大棚的内部结构建立后的模型进行模块划分,并对每个模块进行预先编号,不仅能为无人机的路线规划实现规划,还能够分析无人机规划的路线是否正确。
(5)本用于温室大棚的无人机路径规划方法,对获取的温室大棚内部结构的每个节点,执行2-opt算法,得到无人机在温室大棚内部的最佳组合,然后按照节点顺序分别将最佳路径中的两点设置为起始点和终止点,执行一次A*算法,最终得到最佳路径长度,并在预设软件中进行可视化。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本用于温室大棚的无人机路径规划方法流程图一;
图2为本用于温室大棚的无人机路径规划方法流程图二;
图3为本用于温室大棚的无人机路径规划方法流程图三;
图4为本用于温室大棚的无人机路径规划方法中的距离变换算法图;
图5为本用于温室大棚的无人机路径规划系统结构图一;
图6为本用于温室大棚的无人机路径规划系统结构图二;
图7为本发明一示例性实施例中无人机结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
本发明实施例提供了一种用于温室大棚无人机路径规划方法,如图1至图4所示,所述用于温室大棚的无人机路径规划方法包括步骤:
S1:按照预设建模算法,对温室大棚的内部结构进行建模,并获取内部结构模型数据信息;
本申请采用的是三维栅格数据模型的方法对温室大棚的内部结构进行建模,具体建模算法为:
导入的原始房屋模型就是这样一个二值的三维栅格数据模型矩阵。原始房屋模型所在空间具有X、Y、Z轴三个维度,具有可视为立方体栅格的数据单元,即体元。原始房屋模型中的体元的值只有0和128两种,分别代表空区域和非通行区域。非通行区域包括房屋模型中的墙体、屋顶、地面、楼梯、家具等障碍物,为不支持无人机模型在该体元位置通过的区域。与之相反,空区域则表示该体元不存在障碍物,可支持无人机模型在此通过。
S2:根据获取的内部结构模型数据信息以及预设障碍物扩张算法,获取温室大棚的内部结构模型对应的障碍物扩张布局数据信息;
进一步地,步骤S2根据预设障碍物扩张算法获取障碍物扩张布局数据信息具体包括步骤:
S21:获取无人机对应的三维数据信息;
S22:根据获取的无人机对应的长度数据信息、宽度数据信息以及高度数据信息,对温室大棚的内部结构的预设初始结构布局数据信息进行扩张,获取温室大棚内部结构的障碍物扩张布局数据信息。
进一步地,步骤S22中具体包括步骤:
S221:根据获取的无人机的宽度信息,对预设初始结构布局数据信息进行宽度扩张;
S222:根据获取的无人机的高度信息,按照预设高度扩张算法,对步骤S221中进行宽度扩张后的数据进行高度扩张,并将扩张后的数据信息减去一个余量系数;
S223:根据步骤S222中减去余量系数的扩张后的数据获取扩张结构布局数据信息,并储存至后台服务器。
即:由于无人机在三维栅格房屋数据模型中作为一个被抽象的点,占用很小的体积而无人机本身是有一定体积的,因而在飞行过程中三维栅格数据模型的各个边界及障碍物体元的尺寸对飞行轨迹约束的能力具有一定局限性,模型中的障碍物(墙壁、地面及其他障碍物)并不能很好地对经过的无人机起到制约的作用。因此,实验中应对数据模型中的障碍物向外进行一定宽度的扩张,以保证无人机能够顺利通过可以完全容纳其自身体积的通道。
由于无人机的工作原因,在温室大棚内部进行喷洒农药或水或者监控或者喷洒授粉时,保证无人机在飞行过程中的安全性。需要根据无人机模型的大小,设定无人机到障碍物的安全距离。并使得所规划出的无人机室内路径路程最短。
针对本文提出的无人机室内路径规划方法,需要为算法提供如下参数:飞行器的长度和宽度、飞行器的高度和竖直方向上的步长。
飞行器的长度和宽度和高度:本文的算法是在三维空间的房屋模型中模拟无人机飞行,因此,对于飞行器的模型也同样是具有长宽高三个维度的对象。在本文的实验中,将无人机的模型定义为一个圆柱体,其长度和宽度为该圆柱体的直径,其高度为该圆柱体的高。因此,本文的实验中,飞行器的长度和宽度是相等的。
竖直方向上的步长:竖直方向上的步长定义为,飞行器在竖直高度上每一次变更高度可以移动的最大值。在本文的实验中,认为竖直方向上的步长值要大于或等于房屋模型中楼梯的一个阶梯的高度。
即本申请中,障碍物扩张算法在几何上向平面四周以及向下方扩张,所扩张的程度取决于飞行器,即本文中的无人机的大小。具体地讲,水平方向的扩张半径等于无人机模型的尺寸大小,而向下扩张的程度则为无人机模型的高度减去1。
S3:按照预设地面提取算法,对障碍物扩张布局数据信息进行地面数据提取,并获取障碍物扩张布局数据信息中对应的地面结构布局数据信息;
本申请通过对地面的提取,保证了无人机尽可能沿着一个指定高度平稳飞行。这个指定高度是指无人机距离地面的高度。具体的算法为:首先确定温室大棚的内部结构模型的地面的位置。然后给定的内部结构模型中只有障碍物和非障碍物,其中障碍物包括地面、楼梯、墙及屋顶等,因而有必要对地面(包括楼梯)与其他障碍物进行区分和提取。利用地面及其他障碍物之间的不同的特点来实现对地面(包括楼梯)和其他障碍物之间的区分。
具体预设地面提取算法包括:
S31:对温室大棚的内部结构进行空间水平面分割,并获取温室大棚内部结构的水平面数据信息;
S32:获取水平面数据信息中的预设底面数据信息;
S33:按照预设洪水填充算法,从温室大棚的预设底面开始向多个预设方向进行扩展,并按照预设步长值进行扩展;
S34:根据扩展后的障碍物对应的赋予值,并按照预设比对算法,提取温室大棚内部结构的预设地面数据信息。
通过预设地面提取算法,能够实现保证无人机的飞行高度。
S4:根据获取的障碍物扩张布局数据信息以及预设模块划分规则,对障碍物扩张后的内部结构模型进行模块划分,获取每个模块对应的节点,并对每个节点编号;
S5:根据步骤S4中对模块的编号,从编号中选取预设始发位置信息和预设终点位置信息,结合预设A*算法,以及结合障碍物扩张布局数据信息、地面结构布局数据信息,获取预设始发位置和预设终点位置之间的第一预设最短路线;
S6:结合步骤S4中的编号以及步骤S5中获取的预设始发位置和预设终点位置之间的第一预设最短路线,以及预设2-opt算法,获取从预设始发位置出发后遍历所有节点并返回至预设始发位置的第二预设最短路线。
无人机采用以上技术方案,能够实现从温室大棚的内部结构的模型中的任意一点出发,对各个点逐一遍历,只访问一次并且不重复并最终回到原点。
进一步地,步骤S5和步骤S4之间还包括距离变换算法,具体包括步骤:
A1:根据预设距离变换算法获取温室大棚的内部结构模型对应的距离矩阵;所述距离矩阵中的预设位置点的值为该位置距离温室大棚的内部结构的预设高度平面的预设最小距离值;
A2:对温室大棚的内部结构模型中的空白空间赋值无穷大,对温室大棚的内部结构模型中的预设地面赋值为a,对温室大棚的内部结构模型中的预设障碍物赋值为b。
本申请中采用距离变换算法获得温室大棚的内部结构模型的空间的距离矩阵,矩阵中的每个位置点的值代表该处的距离值,即该体元到房屋模型中一个指定高度的平面的最小距离值,将这个最小距离值作为经过该体元的耗费值。
对所有空白空间(除了内部结构模型当中的地面、楼梯和障碍物)赋值为无穷大(在实际的算法实现过程中,为其赋值为一个很大的值,用来代表无穷大),同时分别为内部结构模型中的地面(包括楼梯)和障碍物赋予两个不同的较小的值,以确保在后面的距离变换算法执行的过程之中,能够准确地对内部结构模型当中的地面(包括楼梯)以及障碍物进行识别。如图4所示。
进一步地,
步骤S5中通过预设A*算法获取预设始发位置和预设终点位置之间的最
短距离,包括步骤:
S51:通过预设估计代价函数获取预设始发位置和预设终点位置之间的预设第一路径,其中预设估计代价函数为:
f(n)=g(n)+h(n)
其中g(n)为预设初始位置到当前点位置的距离估计代价;
h(n)为预设初始位置到预设终点位置的距离代价值;
F(n)为预设初始位置经过当前点位置到预设终点位置的距离估计代价;
其中h(n)的计算公式为:
其中(Xend、Yend、Yend)为预设终点位置的三维坐标,(Xn、Yn、Zn)为当前点位置的三维坐标。
具体的步骤为:
A*算法是一种启发式搜索算法,由于该算法有较高的灵活性和适应性,是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。
A*算法是将Dijkstra算法和BFS算法联合起来利用,取长补短。A*算法的启发函数如下:
f(n)=g(n)+h(n)
g(n)------------从起始点到当前点n的距离估计代价。
h(n)------------从当前点n到终止点的距离代价值。
f(n)-------------从起始点经过当前点n到达终止点的距离估计代价。
当起始点和终止点都确定的情况下,给定一个当前点n,则h(n)的值是固定的,保持不变,而g(n)则可以被更新。
为了得到最优路径,使得h(n)的值小于或等于当前点n到终止点的实际距离,这里h(n)即为该路径搜索规划算法中的启发函数。
一般情况下,h(n)通过计算从当前点n到终止点的欧式距离来求得,在二维平面内表示为:
本文的求解当中,将问题拓展到三维空间坐标系模当中,将h(n)定义为在三维空间模型中从当前点n到终止点的欧氏距离,即:
(x
A*算法的具体步骤为:首先创建一个OpenList表和一个CloseList表,在路径规划时,将待检测的节点存放于OpenList中,而已检测过的格子则存放于Close List中。
设定预设始发位置为A,预设终点位置为B;
首先将起点A加入到OpenList表,并设置起点A为四周其他8个栅格的父节点。对起点A的8个临近点进行搜寻,若这些临近点中有既没有在OpenList表也没有在CloseList表的点时,则对该点的f(n)值进行计算,并将A点放入到CloseList表中,接着判断此时OpenList表是否已空,若没空则说明在到达终点前已经找完了所有可能的路径点,寻找路径失败,算法终止;否则继续从OpenList表中拿出一个f(n)值最小的点,作为寻路的下一步。接着判断该点是否为终点,若是则寻路成功,否则继续将该点设为起点A,接着对A的周围临近点进行操作。
S52:根据步骤S51计算的预设初始位置至预设终点位置的路线数据信息,结合预设距离变换算法获取的温室大棚的内部结构的距离矩阵数据信息,获取无人机在预设初始位置至预设终点位置之间,保持预设扩张宽度的第二预设最短距离。
本申请中目的是使得无人机通过上述路线规划,实现从温室大棚的空间内的任意一点出发,依次遍历各个区域中指定的预设点,且每个点只访问一次,在飞行过程中考虑避障和选择最短的飞行路径,并最终回到原点;因此要检查上述预设两点的路线规划的问题,即可扩展为旅行商问题。
具体的步骤为:在温室大棚的内部结构的预设的n个节点中的某一点出发,对n个节点进行遍历,且对每个节点只能遍历一次,并最终回到最初节点,求最短节点遍历次序。即:
S
其中,s
由于用精细算法去求解会进行大量运算,本申请采用2-opt算法又称为二元素优化算法来解决旅行商问题,具体的步骤为:
步骤1:随机选择一条路线,设为路线一(A->B->C->D->E->F->G),假设其为最短路径,路径为min;
步骤2:随机选择在路线中不相连的两个节点,将两个节点之间的路径翻转过来获得新路径,比方我们随机选中了B节点和E节点,则新路径为A->(E->D->C->B)->F->G,()部分为被翻转的路径;
如果新路径比min路径短,则设新路径为最短路径min,将计数器COUNT值设为0,返回步骤2;否则将计数器COUNT值加1,当COUNT大于等于COUNTMAX时,算法结束,此时min即为最短路径,否则返回步骤2。
本申请中通过A*算法用于对两点间进行最短路径规划,使无人机能够找到最短路径并安全通过室内障碍物;而2-opt算法用于解决室内检查路径规划中的旅行商问题。即首先分别对A*算法和2-opt算法编写Python程序脚本,为实现两种算法的有效结合,使得先对所有房屋节点执行2-opt算法,得到最佳路径组合,然后按节点顺序分别将最佳路径中的两点设置为起始点和终止点,执行一次A*算法,最终得到总的最佳路径长度,并在Paraview软件中进行可视化。
实施例2:
本发明实施例提供了一种用于温室大棚无人机路径规划系统,所述规划系统包括:建模模块,用于按照预设建模算法,对温室大棚的内部结构进行建模,并获取内部结构模型数据信息;
障碍物扩张模块,用于根据获取的内部结构模型数据信息以及预设障碍物扩张算法,获取温室大棚的内部结构模型对应的障碍物扩张布局数据信息;
地面提取模块,用于按照预设地面提取算法,对障碍物扩张布局数据信息进行地面数据提取,并获取障碍物扩张布局数据信息中对应的地面结构布局数据信息;
节点编号模块,用于根据获取的障碍物扩张布局数据信息以及预设模块划分规则,对障碍物扩张后的内部结构模型进行模块划分,获取每个模块对应的节点,并对每个节点编号;
获取预设两点距离模块,从编号中选取预设始发位置信息和预设终点位置信息,结合预设A*算法,以及结合障碍物扩张布局数据信息、地面结构布局数据信息,获取预设始发位置和预设终点位置之间的第一预设最短路线;
获取遍历最佳路线模块,用于根据预设2-opt算法,获取从预设始发位置出发后遍历所有节点并返回至预设始发位置的第二预设最短路线。
进一步的,所述障碍物扩张模块包括:
获取三维数据单元,用于获取无人机对应的三维数据信息;
障碍物扩张布局单元,用于根据获取的无人机对应的长度数据信息、宽度数据信息以及高度数据信息,对温室大棚的内部结构的预设初始结构布局数据信息进行扩张,获取温室大棚内部结构的障碍物扩张布局数据信息。
进一步地,所述障碍物扩张布局单元包括:
宽度扩张单元,用于根据获取的无人机的宽度信息,对预设初始结构布局数据信息进行宽度扩张;
高度扩张单元,用于根据获取的无人机的高度信息,按照预设高度扩张算法,对进行宽度扩张后的数据进行高度扩张,并将扩张后的数据信息减去一个余量系数;
获取扩张数据单元,用于减去余量系数的扩张后的数据获取扩张结构布局数据信息,并储存至后台服务器。
进一步地,所述地面提取模块包括:
水平面分割单元,用于对温室大棚的内部结构进行空间水平面分割,并获取温室大棚内部结构的水平面数据信息,并获取水平面数据信息中的预设底面数据信息;
扩展单元,用于按照预设洪水填充算法,从温室大棚的预设底面开始向多个预设方向进行扩展,并按照预设步长值进行扩展;
获取地面数据信息单元,用于根据扩展后的障碍物对应的赋予值,并按照预设比对算法,提取温室大棚内部结构的预设地面数据信息。
采用本系统能够实现根据温室大棚的内部结构进行相应建模,从而根据建立的温室大棚的室内结构模型进行无人机的路径规划,本路径规划方法,能够不限于一个温室大棚的使用,基于有内部结构数据的建筑物都可进行无人机路径规划之前的内部结构模型建立。会根据无人机的尺寸对建立的温室大棚的内部结构模型进行障碍物扩张,从而实现无人机在飞行过程中不会撞击到障碍物。会对温室大棚内部的水平面进行分割,并提取所述水平面中的地面,所述地面包括地平面和楼梯台阶平面,从而能规划无人机进行高度方向的飞行调节。对温室大棚的内部结构建立后的模型进行模块划分,并对每个模块进行预先编号,不仅能为无人机的路线规划实现规划,还能够分析无人机规划的路线是否正确。对获取的温室大棚内部结构的每个节点,执行2-opt算法,得到无人机在温室大棚内部的最佳组合,然后按照节点顺序分别将最佳路径中的两点设置为起始点和终止点,执行一次A*算法,最终得到最佳路径长度,并在预设软件中进行可视化。
实施例3:
参考图7,一种便于更换电池的无人机,所述无人机包括机体2和电池包1,电池包1包括电池壳体11和设于电池壳体11内的电芯,电池壳体11上设有闩槽,所述机体2设有容纳电池包1的电池仓30,电池仓30内设有按压弹出机构,电池仓30具有一出口,按压弹出机构安装在与电池仓30出口呈相对设置的一端,电池包1可插拔的安装于电池仓30内,电池包1随按压循环实现收入电池仓30内部和弹出电池仓30。
所述按压弹出机构采用类似圆珠笔式的按压弹出机构,包括滑动基座,所述滑动基座的侧面或下方具有斜切的心形的挡块,沿挡块周围设置有滑轨;滑轨分别由滑轨一、滑轨二、滑轨三、滑轨四和滑轨五依次平滑连接而成,其中滑轨一和滑轨四分别位于挡块下方的两侧,滑轨二和滑轨三分别位于挡块上方的两侧,滑轨五位于滑轨一和滑轨四的下方,并且滑轨五与滑轨四连接成直线;在滑轨内放置有套杆,套杆的另一端活动连接在无人机的内部;在无人机内部设置有用于推动滑动基座上下滑动的弹性件,弹性件的另一端连接在滑动基座的侧上方、侧下方或下方。弹性件在位于滑动基座的侧下方或下方时为压缩弹簧。滑轨四与滑轨五之间具有斜切的台阶,滑轨四高于滑轨五,滑轨五与滑轨一平滑相通,保证在使用时套杆的顶端按照预定的轨迹单向滑动。在滑轨二和滑轨三的上方具有导向凸起一,导向凸起一偏向滑轨二一侧,使得套杆在滑轨内滑动时,滑入滑轨三内,而非滑轨二内;保证套杆在滑轨内单向滑动。进一步地,在滑轨四的顶端相对于滑轨三,具有内凹的楔形坡,用以保证套杆顺利地从滑轨三滑动到滑轨四上,而不能够反向滑动。进一步地,在滑轨一的上方具有楔形的起导向作用的导向凸起二,导向凸起二的尾端位于滑轨二的上方,保证按压松手后,套杆顺利滑入滑轨二和滑轨三之间。
所述按压弹出机构还包括锁定机构,所述锁定机构包括锁舌,电池包在无人机内部时套杆位于滑轨二和滑轨三的连接处,电池包的底面与电池仓的出口端面齐平,所述锁舌与电池包表面的闩槽相配合以将电池包锁定在无人机的电池仓内部,当需要更换电池包时利用手指按压电池包底面,套杆的一端从滑轨三处滑入至滑轨四上,松开手指,在弹性件的作用下,弹性件推动电池包向外运动弹出电池仓,套杆的一端从滑轨四相对运动至滑轨五的末端。
实施例4:
一种便于更换电池无人机,包括:机体和电池包,所述电池包包括电池壳体和设于所述电池壳体内的电芯,所述电池壳体的侧壁设置有定位孔,所述机体的侧壁设置有电池腔体结构,所述电池腔体结构包括可以容纳和供电池抽插的电池仓、弹出机构和锁定机构,所述电池仓具有一出口,所述弹出机构安装在与所述电池仓出口呈相对设置的一端,所述锁定机构用以对设于所述电池仓内的电池包进行限位,以限制所述电池包自所述电池仓的出口处脱出,电池包可插拔的安装于所述电池仓内,所述弹出机构设置在所述锁定机构附近,所述弹出机构为按压式弹出机构,使得电池随按压循环实现收入电池仓内部和弹出电池仓;
所述锁定结构设置在与所述电池仓出口呈相对设置的一端,所述锁定结构包括套筒、滑动基座以及设置在滑动基座上的锁舌,所述套筒上设有一缺口,当滑动基座上的锁舌滑动至该缺口时,锁舌与电池包上的定位孔分离,电池包可以移出电池仓,当锁舌远离该缺口时,锁舌被套筒挤压后与电池包上的定位孔配合用以将电池包固定在电池仓内;
所述弹出机构包括设置在滑动基座上的固定块,所述固定块与套筒的上端固定连接,所述固定块的侧面具有斜切的心形的挡块,所述弹出机构还包括穿过滑动基座并与固定块上挡块相配合的运动件,运动件的一端与电池包相抵接,运动件的另一端与挡块相配合。所述弹出机构还包括设置在固定块内部用于推动滑动基座上下滑动的弹性件,所述弹性件驱动滑动基座上下移动,从而控制锁舌与电池包上定位孔的配合,进而锁定或解锁电池。所述固定块与滑动基座设有相互配合的连接结构,固定块只能相对滑动基座在一定行程内移动。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种用于温室大棚的无人机路径规划方法、系统及无人机
- 用于社区配送的三维地理信息系统及无人机航迹路径规划应用方法