盾构姿态多自由度运动特性预测和控制性能评估系统及方法
文献发布时间:2023-06-19 12:25:57
技术领域
本发明属于盾构控制技术领域,涉及一种盾构控制系统,尤其涉及一种盾构姿态多自由度运动特性预测和控制性能评估系统及方法。
背景技术
针对基于机器学习模型预测盾构姿态问题,在已发表专利和论文中的普遍方法为:通过选择某种机器学习算法,确定模型的输入输出维度之后,训练历史数据得到盾构姿态预测器。此类方法存在以下几个方面的缺陷:
(1)某些方法中根据当前施工工程的历史数据进行模型训练,由于同一个工程中的工况相近,所训练的模型可以快速收敛。但此方法仅仅考虑了所获得模型针对历史数据的拟合效果,并未考虑到模型在实际应用过程中可能会遇到未“训练”的工况,此情景下盾构的运动特性可能是不同的,盾构的实际运动姿态会与预测姿态之间存在较大的偏差;且此类方法需要先累积当前工程的施工数据才能够对盾构姿态进行预测,无法在工程的初始阶段就进行盾构姿态预测(中国专利CN202010146856.5,专利名称为:一种基于XGBoost的盾构掘进参数特征提取与姿态偏差预测方法)。
(2)有些方法中使用单个深度学习网络对海量的盾构历史施工数据进行多维度学习,虽然深度学习网络可以无限的拟合复杂的非线性关系,但由于土层分布具有多样性、盾构与隧道设计轴线位置关系具有多样性、盾构类型具有多样性,导致盾构施工的工况种类极多,如果将海量的历史施工数据直接放入深度学习网络中进行训练,往往会导致某些出现频率相对较低的工况数据被当做噪声数据而忽略;此外,往往由于CPU/GPU设备的限制,为了通过海量数据直接获得较好的模型拟合效果,需要消耗大量的时间成本。
(3)现有方法中的盾构姿态预测模型仅仅针对盾构的切口和盾尾在未来某一点的偏差值进行预测,预测结果是短距的、单点的、非连续的,无法表征盾构姿态变化的趋势性。
有鉴于此,如今迫切需要设计一种新的盾构姿态预测方式,以便克服现有盾构姿态预测方式存在的上述至少部分缺陷。
发明内容
本发明提供一种盾构姿态多自由度运动特性预测和控制性能评估系统及方法,可提升盾构姿态预测的精度,加快姿态预测模型的收敛速度。
为解决上述技术问题,根据本发明的一个方面,采用如下技术方案:
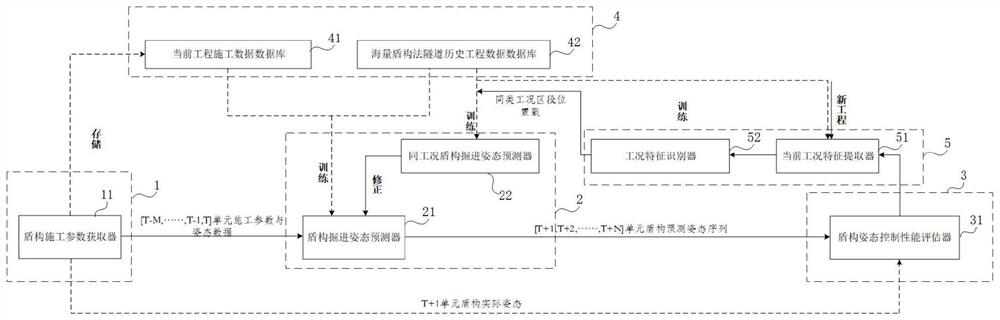
一种盾构姿态多自由度运动特性预测和控制性能评估系统,所述评估系统包括:
数据获取模块,用以实时采集盾构掘进过程中的施工参数与盾构操作参数;
多自由度姿态预测模块,用以根据前期的盾构空间姿态与操作参数对未来设定时间内盾构多自由度姿态变化情况进行预测,并将该预测结果输入至控制性能评估模块;
控制性能评估模块,用以评价多自由度姿态预测模块的预测结果与盾构各自由度姿态实际变化量的吻合度,根据该吻合度判断当前的盾构姿态控制性能是否发生变化,进而决定是否选用同工况盾构掘进姿态预测器修正前期的盾构掘进姿态预测器进行盾构姿态预测。
作为本发明的一种实施方式,所述多自由度预测模块基于海量的历史施工数据,通过对当前工况特征识别实现盾构姿态多自由度运动特性预测;所述多自由度姿态预测模块包括盾构掘进姿态预测器、同工况盾构掘进姿态预测器;
所述盾构掘进姿态预测器由当前工程施工数据库和海量盾构法隧道历史数据工程数据库提供的数据训练得到,实现对盾构未来几环的姿态变化进行预测;
所述同工况盾构掘进姿态预测器由同类工况区段位置戳结合历史工程数据库对应区段施工数据训练得到,其输出值可对盾构掘进姿态预测器的预测结果进行修正,确保盾构在姿态控制性能发生变化的情况下,能快速的借助历史数据,提升当前盾构姿态预测的准确度。
作为本发明的一种实施方式,所述数据获取模块包括盾构施工参数获取器;盾构施工参数获取器用于读取盾构实时施工参数与实时姿态;
所述评估系统还包括数据存储模块;所述数据存储模块用以存储当前工程盾构掘进产生的施工数据以及海量的历史工程施工数据,并将该部分数据用于盾构掘进姿态预测器、同工况盾构掘进姿态预测器、当前工况特征提取器的训练;
所述数据存储模块包括当前工程施工数据库、海量盾构法隧道历史工程数据库;当前工程施工数据库用于存储当前工程不断产生的施工数据;海量盾构法隧道历史工程数据库用于存储已完工的各条盾构法隧道施工数据;
所述当前工程施工数据库用于存储当前工程不断产生的施工数据,其采集的数据信息维度包含盾构的各项操作参数、状态参数、地质信息、轴线信息,其数据量随着盾构的推进进行不断的累积;
所述海量盾构法隧道历史工程数据库用以存储盾构法隧道历史工程施工数据,其包含数据的数据维度与当前工程施工数据库中的信息维度保持一致。
所述控制性能评估模块包括盾构控制性能评估器,用以根据姿态预测器的姿态预测结果和盾构姿态的实际变化情况对盾构机的控制性能进行评估,判断当前盾构掘进的工况是否发生了变化,是否需要从海量的历史数据中抽取类似工况数据训练同工况的盾构掘进姿态预测器;
所述评估系统还包括相似工况提取模块,用以针对海量历史施工数据进行盾构掘进工况聚类,并将其进行标签标记;根据控制性能评估模块的评估结果提取当前掘进段的工况特征参数,并将其输入至工况特征识别器进行类别判断,输出与当前工况特征相似的历史工程对应区段位置戳,根据该位置戳从海量历史工程数据中抽取对应的施工数据;
所述相似工况提取模块包括当前工况特征提取器、工况特征识别器;
所述当前工况特征提取器用以提取当前工程的工况特征参数;
所述工况特征识别器由海量盾构法隧道历史工程数据训练得的,将历史完工工程中的不同工况进行分类,结合当前工况特征提取器,对当前工况进行归类,并提取出历史工况中同类工况区段的位置戳。
作为本发明的一种实施方式,所述盾构施工参数获取器用以采集实时的盾构施工参数与盾构姿态数据,所采集的数据维度与盾构姿态预测器、同工况盾构掘进姿态预测器的输入维度保持一致;盾构施工参数至少包含有:正面土压力上、正面土压力右、正面土压力下、正面土压力左、刀盘扭矩、刀盘转速、总推力、上/右/下/左各分区千斤顶油压;盾构姿态参数至少包含有:切口水平偏差、切口高程偏差、铰接水平偏差、铰接高程偏差、盾尾水平偏差、盾尾高程偏差、盾构坡度角、盾构滚角、盾构偏转角、隧道设计轴线空间三维坐标;T单元为当前盾构所处单元,根据不同的施工项目确定以上参数的个数;
设定参数的个数为l个;抽取以上l个参数[T-M,……,T-1,T]单元的数据,构成(M+1)×l矩阵,其中单元可以为时间戳或位置戳,单元长度可以根据期望的间隔步长进行设置;
盾构施工参数获取器输出[T-M,……,T-1,T]单元施工参数与姿态数据矩阵传入盾构掘进姿态预测器。
作为本发明的一种实施方式,所述盾构掘进姿态预测器用以基于当前工程施工数据与海量历史数据训练盾构掘进姿态预测器,盾构掘进姿态预测器拟合了已施工区段各种工况下的姿态预测关系;盾构掘进姿态预测器的输入信息至少包含正面土压力上、正面土压力右、正面土压力下、正面土压力左、刀盘扭矩、刀盘转速、总推力、上/右/下/左各分区千斤顶油压、切口水平偏差、切口高程偏差、铰接水平偏差、铰接高程偏差、盾尾水平偏差、盾尾高程偏差、盾构坡度角、盾构滚角、隧道设计轴线空间三维坐标;姿态预测器的输出信息包含姿态多自由度的运动特性,其至少包括切口水平偏差变化量、切口高程偏差变化量、铰接水平偏差变化量、铰接高程偏差变化量、盾尾水平偏差变化量、盾尾高程偏差变化量、盾构坡度角变化量、盾构滚角变化量、盾构偏转角变化量;
盾构掘进姿态预测器的训练数据包括两部分数据,一部分来自当前工程施工数据,另一部分来自海量历史工程数据;训练过程中,将两部分数据根据数据维度信息进行融合,
在一次迭代过程中,盾构施工参数与操作数据通过输入层进入ANN输入层的中间向量
输出层中输出向量
其中,σ为内部ANN网络的计算函数,W,B分别为ANN网络最后一层与输出层之间的权重矩阵和偏置矩阵;
盾构掘进姿态预测器基于当前工程数据与海量的历史工程数据训练获得盾构姿态预测模型,根据盾构施工参数获取器输入数据预测后续几环的盾构姿态变化情况,并将预测的姿态序列输入至盾构姿态控制性能评估器;
作为本发明的一种实施方式,所述盾构姿态控制性能评估器针对T+1单元根据盾构预测姿态序列和T+1单元盾构实际姿态的吻合度进行评估;当盾构T+1单元姿态与T+1预测姿态吻合度符合要求,说明当前工况下盾构控制性能相对稳定,当预测结果与实际值之间存在较大的差别时,说明当前盾构的控制性能存在突变;通过下式对盾构的控制性能进行评估:
其中,Devi
作为本发明的一种实施方式,所述当前工况特征提取器用以提取盾构在T+1单元推进过程中的表征盾构掘进工况的施工参数均值,至少包含以下参数:正面土压力上、正面土压力右、正面土压力下、正面土压力左、刀盘扭矩、刀盘转速、总推力、上/右/下/左各分区千斤顶油压;
作为本发明的一种实施方式,所述工况特征识别器用以基于海量历史工程数据针对历史工况特征数据进行聚类,其工况特征参数类型与当前工况特征提取器中的特征参数类型保持一致;使用K-Means算法对历史工况进行聚类,工况类别个数根据以下方法进行确定:
Step1:假设工况初始类别个数为k=2,且k Step2:计算使用K-Means方法下种类个数为k的情况下,此时的样本数据中距离各自中心点的欧式距离为D Step3:在当前工况种类个数上,类别个数加一,即k+1; Step4:计算工况种类个数增加1后,各样本距离中心点的距离D Step5:重复Step2到Step4,当G出现减小时,此时的k值为历史工况应当划分的类别个数。 根据以上方法确定历史工况确定的类别个数,并对其中心点进行编号,将其作为历史施工数据区段的工况标签,将工况特征识别器转化为分类器的功能。 读取当前工况特征提取器传入的当前工况特征参数,基于欧式距离对当前工况所属类别进行判断,取距离各类欧式距离最小的工况类型,作为当前工况所属类别,并将此类别中的所有区段的位置戳进行输出。 作为本发明的一种实施方式,所述同工况盾构掘进姿态预测器用以基于工况特征识别器输出的同工况区段位置戳从海量历史施工数据中抽取对应区段的盾构施工参数与盾构姿态参数,其数据维度与盾构施工参数获取器采集的数据维度保持一致; 当score<η时,同工况盾构掘进姿态预测器的输出值对当前的盾构掘进姿态预测值进行修正,修正结果用于T+1单元后的盾构掘进姿态序列,给出修正函数形式:
其中, 同工况盾构掘进姿态预测器与盾构掘进姿态预测器的网络架构是相同的,两者的区别在于,盾构掘进姿态预测器将历史工程中各种工况下的盾构姿态预测关系综合到了一个网络模型中;同工况盾构掘进姿态预测器针对划分出的每一种工况有对应的姿态预测模型;盾构掘进姿态预测器在掘进工况稳定阶段器预测的准确度相对较高,但在工况突变的情况下,其无法快速的将工况变化情况融入到姿态预测过程中;同工况盾构掘进姿态预测器用以在工况发生突变时快速的在历史工程中寻找到相似工况的施工数据,快速拟合出此工况下的盾构姿态预测模型,弥补盾构掘进姿态预测器的缺陷;两套模型在不同的工程应用阶段互相配合,提升盾构姿态预测的准确性; 在同工况盾构掘进姿态预测器修正盾构掘进姿态预测结果期间,当前施工数据继续累加至当前工程施工数据库中,并在后台同步对盾构掘进姿态预测器进行训练,当其预测结果进入盾构控制性能评估器计算score<η时,停止同工况盾构掘进姿态预测器的修正过程;当该模型框架直接用于新工程中时,直接对当前工况特征进行提取,使用同工况盾构掘进姿态预测器对盾构掘进姿态进行预测。 根据本发明的另一个方面,采用如下技术方案:一种盾构姿态多自由度运动特性预测和控制性能评估方法,所述评估方法包括: 数据获取步骤,实时采集盾构掘进过程中的施工参数与盾构操作参数; 多自由度姿态预测步骤,根据前期的盾构空间姿态与操作参数对未来设定时间内盾构多自由度姿态变化情况进行预测; 控制性能评估步骤,评价多自由度姿态预测步骤的预测结果与盾构各自由度姿态实际变化量的吻合度,根据该吻合度判断当前的盾构姿态控制性能是否发生变化,进而决定是否选用同工况盾构掘进姿态预测器修正前期的盾构掘进姿态预测器进行盾构姿态预测。 作为本发明的一种实施方式,所述评估方法还包括: 数据存储步骤,存储当前工程盾构掘进产生的施工数据以及海量的历史工程施工数据,并将该部分数据用于盾构掘进姿态预测器、同工况盾构掘进姿态预测器、当前工况特征提取器的训练; 相似工况提取步骤,针对海量历史施工数据进行盾构掘进工况聚类,并将其进行标签标记;根据控制性能评估模块的评估结果提取当前掘进段的工况特征参数,并将其输入至工况特征识别器进行类别判断,输出与当前工况特征相似的历史工程对应区段位置戳,根据该位置戳从海量历史工程数据中抽取对应的施工数据。 本发明的有益效果在于:本发明提出的盾构姿态多自由度运动特性预测和控制性能评估系统及方法,可提升盾构姿态预测的精度,加快姿态预测模型的收敛速度。 本发明不仅考虑了海量的历史施工数据,也考虑了当前工程的盾构施工数据,合理的结合两部分数据,在提升模型收敛速度的同时,使模型能够快速的被应用到新工程中。此外,本专利所述方法针对盾构姿态实现多环距离的预测,表征根据当前的盾构掘进参数设置特点,盾构姿态的变化趋势。 附图说明 图1为本发明一实施例中评估系统的组成示意图。 图2为本发明一实施例中盾构掘进姿态预测器、同工况盾构掘进姿态预测器网络结构图。 图3为本发明一实施例中单次训练过程中网络展开示意图。 图4为本发明一实施例中描述盾构姿态各自由度参数物理意义示意图。 图5为本发明一实施例中描述盾构姿态各自由度参数物理意义示意图。 图6为本发明一实施例中评估方法的流程图。 具体实施方式 下面结合附图详细说明本发明的优选实施例。 为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。 该部分的描述只针对几个典型的实施例,本发明并不仅局限于实施例描述的范围。相同或相近的现有技术手段与实施例中的一些技术特征进行相互替换也在本发明描述和保护的范围内。 说明书中各个实施例中的步骤的表述只是为了方便说明,本申请的实现方式不受步骤实现的顺序限制。说明书中的“连接”既包含直接连接,也包含间接连接。 本发明揭示了一种盾构姿态多自由度运动特性预测和控制性能评估系统,图1为本发明一实施例中评估系统的组成示意图;请参阅图1,所述评估系统包括:数据获取模块1、多自由度姿态预测模块2及控制性能评估模块3。 数据获取模块1用以实时采集盾构掘进过程中的施工参数与盾构操作参数。 多自由度姿态预测模块2用以根据前期的盾构空间姿态与操作参数对未来设定时间内盾构多自由度姿态变化情况进行预测,并将该预测结果输入至控制性能评估模块3。 控制性能评估模块3用以评价多自由度姿态预测模块的预测结果与盾构各自由度姿态实际变化量的吻合度,根据该吻合度判断当前的盾构姿态控制性能是否发生变化,进而决定是否选用同工况盾构掘进姿态预测器修正前期的盾构掘进姿态预测器进行盾构姿态预测,提升盾构姿态预测精度。 在本发明的一实施例中,所述数据获取模块1包括盾构施工参数获取器11;盾构施工参数获取器11用于读取盾构实时施工参数与实时姿态。 在本发明的一实施例中,所述盾构施工参数获取器11用以采集实时的盾构施工参数与盾构姿态数据,所采集的数据维度与盾构姿态预测器、同工况盾构掘进姿态预测器的输入维度保持一致;盾构施工参数至少包含有:正面土压力上、正面土压力右、正面土压力下、正面土压力左、刀盘扭矩、刀盘转速、总推力、上/右/下/左各分区千斤顶油压;盾构姿态参数至少包含有:切口水平偏差、切口高程偏差、铰接水平偏差、铰接高程偏差、盾尾水平偏差、盾尾高程偏差、盾构坡度角、盾构滚角、盾构偏转角、隧道设计轴线空间三维坐标;T单元为当前盾构所处单元,根据不同的施工项目确定以上参数的个数。 设定参数的个数为l个;抽取以上l个参数[T-M,……,T-1,T]单元的数据,构成(M+1)×l矩阵,其中单元可以为时间戳或位置戳,单元长度可以根据期望的间隔步长进行设置。盾构施工参数获取器输出[T-M,……,T-1,T]单元施工参数与姿态数据矩阵传入盾构掘进姿态预测器。 所述评估系统还可以包括数据存储模块4;所述数据存储模块4用以存储当前工程盾构掘进产生的施工数据以及海量的历史工程施工数据,并将该部分数据用于盾构掘进姿态预测器、同工况盾构掘进姿态预测器、当前工况特征提取器的训练; 所述数据存储模块4包括当前工程施工数据库41、海量盾构法隧道历史工程数据库42;当前工程施工数据库41用于存储当前工程不断产生的施工数据;海量盾构法隧道历史工程数据库42用于存储已完工的各条盾构法隧道施工数据。 所述当前工程施工数据库41用于存储当前工程不断产生的施工数据,其采集的数据信息维度包含盾构的各项操作参数、状态参数、地质信息、轴线信息,其数据量随着盾构的推进进行不断的累积。所述海量盾构法隧道历史工程数据库42用以存储盾构法隧道历史工程施工数据,其包含数据的数据维度与当前工程施工数据库中的信息维度保持一致。 请继续参阅图1,在一实施例中,所述多自由度预测模块2基于海量的历史施工数据,通过对当前工况特征识别实现盾构姿态多自由度运动特性预测。所述多自由度姿态预测模块2包括盾构掘进姿态预测器21、同工况盾构掘进姿态预测器22。所述盾构掘进姿态预测器22由当前工程施工数据库41和海量盾构法隧道历史数据工程数据库42提供的数据训练得到,实现对盾构未来几环的姿态变化进行预测。所述同工况盾构掘进姿态预测器22由同类工况区段位置戳结合历史工程数据库对应区段施工数据训练得到,其输出值可对盾构掘进姿态预测器的预测结果进行修正,确保盾构在姿态控制性能发生变化的情况下,能快速的借助历史数据,提升当前盾构姿态预测的准确度。 所述控制性能评估模块3包括盾构控制性能评估器31,用以根据姿态预测器的姿态预测结果和盾构姿态的实际变化情况对盾构机的控制性能进行评估,判断当前盾构掘进的工况是否发生了变化,是否需要从海量的历史数据中抽取类似工况数据训练同工况的盾构掘进姿态预测器。 在本发明的一实施例中,所述盾构姿态控制性能评估器31针对T+1单元根据盾构预测姿态序列和T+1单元盾构实际姿态的吻合度进行评估;当盾构T+1单元姿态与T+1预测姿态吻合度符合要求,说明当前工况下盾构控制性能相对稳定,当预测结果与实际值之间存在较大的差别时,说明当前盾构的控制性能存在突变;通过下式对盾构的控制性能进行评估:
其中,Devi 图4、图5为本发明一实施例中描述盾构姿态各自由度参数物理意义示意图;请参阅图4、图5,在本发明的一实施例中,所述盾构掘进姿态预测器21用以基于当前工程施工数据与海量历史数据训练盾构掘进姿态预测器,盾构掘进姿态预测器拟合了已施工区段各种工况下的姿态预测关系;盾构掘进姿态预测器的输入信息至少包含正面土压力上、正面土压力右、正面土压力下、正面土压力左、刀盘扭矩、刀盘转速、总推力、上/右/下/左各分区千斤顶油压、切口水平偏差、切口高程偏差、铰接水平偏差、铰接高程偏差、盾尾水平偏差、盾尾高程偏差、盾构坡度角、盾构滚角、隧道设计轴线空间三维坐标;姿态预测器的输出信息包含姿态多自由度的运动特性,其至少包括切口水平偏差变化量、切口高程偏差变化量、铰接水平偏差变化量、铰接高程偏差变化量、盾尾水平偏差变化量、盾尾高程偏差变化量、盾构坡度角变化量、盾构滚角变化量、盾构偏转角变化量。 盾构掘进姿态预测器21的训练数据包括两部分数据,一部分来自当前工程施工数据,另一部分来自海量历史工程数据;训练过程中,将两部分数据根据数据维度信息进行融合, 盾构掘进姿态预测器21的网络结果如图2所示。盾构掘进姿态预测器的网络结果如图2所示,其中i=(M+1)×l,t=N×k;盾构掘进姿态预测器网络一次周期训练过程的展开形式如图3所示。 在一次迭代过程中,盾构施工参数与操作数据通过输入层进入ANN输入层的中间向量
输出层中输出向量
其中,σ为内部ANN网络的计算函数,W,B分别为ANN网络最后一层与输出层之间的权重矩阵和偏置矩阵; 盾构掘进姿态预测器基于当前工程数据与海量的历史工程数据训练获得盾构姿态预测模型,根据盾构施工参数获取器输入数据预测后续几环的盾构姿态变化情况,并将预测的姿态序列输入至盾构姿态控制性能评估器。 如图1所示,在本发明的一实施例中,所述评估系统还可以包括相似工况提取模块5,用以针对海量历史施工数据进行盾构掘进工况聚类,并将其进行标签标记;根据控制性能评估模块5的评估结果提取当前掘进段的工况特征参数,并将其输入至工况特征识别器进行类别判断,输出与当前工况特征相似的历史工程对应区段位置戳,根据该位置戳从海量历史工程数据中抽取对应的施工数据; 所述相似工况提取模块5包括当前工况特征提取器51、工况特征识别器52。所述当前工况特征提取器51用以提取当前工程的工况特征参数。所述工况特征识别器52由海量盾构法隧道历史工程数据训练得的,将历史完工工程中的不同工况进行分类,结合当前工况特征提取器,对当前工况进行归类,并提取出历史工况中同类工况区段的位置戳。 在本发明的一实施例中,所述当前工况特征提取器51用以提取盾构在T+1单元推进过程中的表征盾构掘进工况的施工参数均值,至少包含以下参数:正面土压力上、正面土压力右、正面土压力下、正面土压力左、刀盘扭矩、刀盘转速、总推力、上/右/下/左各分区千斤顶油压。 在本发明的一实施例中,所述工况特征识别器52用以基于海量历史工程数据针对历史工况特征数据进行聚类,其工况特征参数类型与当前工况特征提取器中的特征参数类型保持一致;使用K-Means算法对历史工况进行聚类,工况类别个数根据以下方法进行确定: Step1:假设工况初始类别个数为k=2,且k Step2:计算使用K-Means方法下种类个数为k的情况下,此时的样本数据中距离各自中心点的欧式距离为D Step3:在当前工况种类个数上,类别个数加一,即k+1; Step4:计算工况种类个数增加1后,各样本距离中心点的距离D Step5:重复Step2到Step4,当G出现减小时,此时的k值为历史工况应当划分的类别个数。 根据以上方法确定历史工况确定的类别个数,并对其中心点进行编号,将其作为历史施工数据区段的工况标签,将工况特征识别器转化为分类器的功能。 读取当前工况特征提取器传入的当前工况特征参数,基于欧式距离对当前工况所属类别进行判断,取距离各类欧式距离最小的工况类型,作为当前工况所属类别,并将此类别中的所有区段的位置戳进行输出。 在本发明的一实施例中,所述同工况盾构掘进姿态预测器用以基于工况特征识别器输出的同工况区段位置戳从海量历史施工数据中抽取对应区段的盾构施工参数与盾构姿态参数,其数据维度与盾构施工参数获取器采集的数据维度保持一致,基于抽取后的数据使用与盾构掘进姿态预测器同样的构建方法训练图2中所示网络,获得同工况盾构掘进姿态预测器; 当score<η时,同工况盾构掘进姿态预测器的输出值对当前的盾构掘进姿态预测值进行修正,修正结果用于T+1单元后的盾构掘进姿态序列,给出修正函数形式:
其中,
其中, 同工况盾构掘进姿态预测器与盾构掘进姿态预测器的网络架构是相同的,两者的区别在于,盾构掘进姿态预测器将历史工程中各种工况下的盾构姿态预测关系综合到了一个网络模型中;同工况盾构掘进姿态预测器针对划分出的每一种工况有对应的姿态预测模型;盾构掘进姿态预测器在掘进工况稳定阶段器预测的准确度相对较高,但在工况突变的情况下,其无法快速的将工况变化情况融入到姿态预测过程中;同工况盾构掘进姿态预测器用以在工况发生突变时快速的在历史工程中寻找到相似工况的施工数据,快速拟合出此工况下的盾构姿态预测模型,弥补盾构掘进姿态预测器的缺陷;两套模型在不同的工程应用阶段互相配合,提升盾构姿态预测的准确性; 在同工况盾构掘进姿态预测器修正盾构掘进姿态预测结果期间,当前施工数据继续累加至当前工程施工数据库中,并在后台同步对盾构掘进姿态预测器进行训练,当其预测结果进入盾构控制性能评估器计算score<η时,停止同工况盾构掘进姿态预测器的修正过程;当该模型框架直接用于新工程中时,直接对当前工况特征进行提取,使用同工况盾构掘进姿态预测器对盾构掘进姿态进行预测。 本发明还揭示一种盾构姿态多自由度运动特性预测和控制性能评估方法,图6为本发明一实施例中评估方法的流程图;请参阅图6,所述评估方法包括: 【步骤S1】数据获取步骤,实时采集盾构掘进过程中的施工参数与盾构操作参数; 【步骤S2】多自由度姿态预测步骤,根据前期的盾构空间姿态与操作参数对未来设定时间内盾构多自由度姿态变化情况进行预测; 在一实施例中,基于海量的历史施工数据,通过对当前工况特征识别实现盾构姿态多自由度运动特性预测;所述多自由度姿态预测步骤包括: 通过当前工程施工数据库和海量盾构法隧道历史数据工程数据库提供的数据训练得到盾构掘进姿态预测器,实现对盾构未来几环的姿态变化进行预测; 同类工况区段位置戳结合历史工程数据库对应区段施工数据训练得到同工况盾构掘进姿态预测器,其输出值可对盾构掘进姿态预测器的预测结果进行修正,确保盾构在姿态控制性能发生变化的情况下,能快速的借助历史数据,提升当前盾构姿态预测的准确度。 【步骤S3】控制性能评估步骤,评价多自由度姿态预测步骤的预测结果与盾构各自由度姿态实际变化量的吻合度,根据该吻合度判断当前的盾构姿态控制性能是否发生变化,进而决定是否选用同工况盾构掘进姿态预测器修正前期的盾构掘进姿态预测器进行盾构姿态预测,提升盾构姿态预测精度。 在本发明的一实施例中,所述评估方法还包括: 数据存储步骤,存储当前工程盾构掘进产生的施工数据以及海量的历史工程施工数据,并将该部分数据用于盾构掘进姿态预测器、同工况盾构掘进姿态预测器、当前工况特征提取器的训练; 相似工况提取步骤,针对海量历史施工数据进行盾构掘进工况聚类,并将其进行标签标记;根据控制性能评估模块的评估结果提取当前掘进段的工况特征参数,并将其输入至工况特征识别器进行类别判断,输出与当前工况特征相似的历史工程对应区段位置戳,根据该位置戳从海量历史工程数据中抽取对应的施工数据。 在本发明的一种使用场景中,本发明预测方法为基于机器学习的盾构姿态进行预测方法,该方法中盾构姿态预测器所使用的机器学习方法为ANN类神经网络,但具体哪种ANN网络不做具体的要求,本专利中的方法框架针对任一种ANN网络均可适用,使用者可以根据自己的需求选择ANN网络建立盾构姿态预测器;此外,本专利只针对模型中必须含有的参数进行限制,使用者可以在本专利的基础上对盾构姿态预测器输入的参数进行适宜的扩充。专利中提到的上/右/下/左等概念为便于理解选取的某一种分区方式进行描述的,其也包含其他方式的千斤顶分区形式。 综上所述,本发明提出的盾构姿态多自由度运动特性预测和控制性能评估系统及方法,可提升盾构姿态预测的精度,加快姿态预测模型的收敛速度。本发明不仅考虑了海量的历史施工数据,也考虑了当前工程的盾构施工数据,合理的结合两部分数据,在提升模型收敛速度的同时,使模型能够快速的被应用到新工程中。此外,本专利所述方法针对盾构姿态实现多环距离的预测,表征根据当前的盾构掘进参数设置特点,盾构姿态的变化趋势。 需要注意的是,本申请可在软件和/或软件与硬件的组合体中被实施;例如,可采用专用集成电路(ASIC)、通用目的计算机或任何其他类似硬件设备来实现。在一些实施例中,本申请的软件程序可以通过处理器执行以实现上文步骤或功能。同样地,本申请的软件程序(包括相关的数据结构)可以被存储到计算机可读记录介质中;例如,RAM存储器,磁或光驱动器或软磁盘及类似设备。另外,本申请的一些步骤或功能可采用硬件来实现;例如,作为与处理器配合从而执行各个步骤或功能的电路。 以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。 这里本发明的描述和应用是说明性的,并非想将本发明的范围限制在上述实施例中。实施例中所涉及的效果或优点可因多种因素干扰而可能不能在实施例中体现,对于效果或优点的描述不用于对实施例进行限制。这里所披露的实施例的变形和改变是可能的,对于那些本领域的普通技术人员来说实施例的替换和等效的各种部件是公知的。本领域技术人员应该清楚的是,在不脱离本发明的精神或本质特征的情况下,本发明可以以其它形式、结构、布置、比例,以及用其它组件、材料和部件来实现。在不脱离本发明范围和精神的情况下,可以对这里所披露的实施例进行其它变形和改变。
- 盾构姿态多自由度运动特性预测和控制性能评估系统及方法
- 一种盾构姿态位置偏差预测方法