一种锅炉内壁巡检方法及系统
文献发布时间:2023-06-19 13:49:36
技术领域
本发明为一种锅炉内壁巡检方法和系统,属于无人机室内3D扫描建模领域。
背景技术
火电厂的锅炉是电厂核心的发电生产设备之一。其体积庞大,特别是超超临界的百万等级锅炉,其最高约100m左右,内部跨度可达60m,深度40m左右。锅炉内部煤粉燃烧的环境复杂恶劣,需要长期在超超临界高温高压参数的水蒸气条件下长期稳定的运行。因此,设备可靠性和巡检质量的要求非常高,保障锅炉安全运行具有至关重要的意义。对锅炉停机检测的工作,一般采用搭设大型脚手架或升降式大平台后进行人工检测法。检验员在脚手架上通过目测或仪器发现锅炉炉内可能存在的腐蚀、裂纹、变形、磨损等缺陷。传统的检测方式需要搭建大量脚手架等准备工作,工作量庞大、工期长、危险系数高,并且对检验员的技能和经验要求较高。
为了提高效率和安全系数,我公司提出采用无人机3D扫描方式收集锅炉内部物理信息。但是锅炉内部与外界信号沟通不畅,无人机无法接受GPS信号,造成室内无法定位,进而影响无人机无法进行3D扫描。
另外,锅炉内部狭窄、空间高;利用常规(SLAM)算法同步定位和地图构建无法对锅炉内部环境数据全部收集,具体而言,无人机上方环境数据无法扫描到,导致无人机上升时,无法准确判断上方是否存在障碍物。
发明内容
为解决上述技术问题,本发明提出一种用于锅炉内部巡检的方法和适合该巡检方法的系统。
为实现上述技术目的,本发明提供的技术方案为:
一种锅炉内壁巡检方法,所述锅炉内壁巡检步骤为:
第一步,锅炉内壁初始3D建模,具体3D建模步骤为:
1)在锅炉进风口或者烟囱位置设置飞行起点;
2)建模无人机自飞行起点起飞,路径规划模块开始工作,所述激光雷达A采集建模无人机上方物理环境数据,激光雷达B采集建模无人机至少一个侧面的物理环境数据,结合陀螺仪生成的惯性导航数据,分别绘制建模无人机上方地图和建模无人机某一侧面地图;
3)激光测距雷达周期采集无人机距离飞行起点高度;
4)根据上方地图和侧面地图控制无人机在锅炉内飞行,每次飞行一定高度后启动建模扫描模块生成锅炉内三维模型数据;
5)巡检扫描模块扫描过程中,激光雷达D采集参数用于计算建模无人机侧面地图中的水平位置参数,激光测距雷达启动用于计算建模无人机高度参数,如此实现计算建模扫描模块扫描过程中建模无人机实时位置参数;
6)根据建模无人机实时位置参数以及建模扫描模块扫描数据,确定锅炉内壁三维坐标参数,如此大量的锅炉内壁三维坐标参数组合生成锅炉内壁建模3D模型;
第二步,锅炉内壁巡检,具体巡检步骤为:
1)在锅炉进风口或者烟囱位置设置飞行起点;
2)巡检无人机自飞行起点起飞,巡检无人机加载上方地图数据,启动激光测距仪检测巡检无人机高度,激光雷达D与陀螺仪的数据采用Geo技术生成巡检无人机某一侧面地图;
3)巡检无人机根据侧面地图和高度确定自身位置;
4)激光测距仪周期采集巡检无人机距离飞行起点高度;
5)巡检无人机根据上方地图以及自身位置参数自动规划巡检路径;
6)巡检无人机每次飞行一定高度后启动巡检扫描模块生成锅炉内三维模型数据;
7)巡检扫描模块扫描过程中,激光雷达D采集参数用于计算巡检无人机侧面地图中的水平位置参数,激光测距仪启动用于计算巡检无人机高度参数,如此实现计算巡检扫描模块扫描过程中巡检无人机实时位置参数;
8)根据巡检无人机实时位置参数以及激光雷达D扫描数据,确定锅炉内壁三维坐标参数,如此大量的锅炉内壁三维坐标参数组合生成锅炉内壁巡检3D模型;
第三步,锅炉内壁巡检3D模型与锅炉内壁建模3D模型数据对比,判断锅炉内壁形状或者结构改变以及锅炉内壁发生变化的具体位置,为后期维修提供指导。
一种锅炉内壁巡检系统,所述锅炉内壁巡检系统包括:建模无人机子系统和巡检无人机子系统;所述建模无人机子系统为巡检无人机子系统提供锅炉空间数据和锅炉内壁3D扫描建模数据。
所述建模无人机子系统包括:建模无人机、路径规划模块和建模扫描模块;所述建模无人机上端固定有路径规划模块,所述建模无人机上固定有建模扫描模块,所述路径规划模块和建模扫描模块与建模无人机电气连接;
所述路径规划模块包括激光雷达A和激光雷达B,所述激光雷达A信号检测面水平且面向上方,所述激光雷达A用于采集建模无人机上方物理环境数据,所述激光雷达B检测方向指向建模无人机侧面,所述激光雷达B用于采集建模无人机至少一个侧面的物理环境数据;
所述建模扫描模块用于采集建模无人机侧面一周的建筑数据。
所述建模无人机上方还安装有激光测距雷达,所述激光测距雷达用于测量建模无人机距离地面距离。
所述巡检无人机子系统包括:巡检无人机、定位模块和巡检扫描模块;
所述巡检无人机上固定有定位模块,所述定位模块包括:激光雷达D和激光测距仪,所述激光雷达D固定于巡检无人机侧面,所述激光雷达D用于采集巡检无人机至少一个侧面的物理环境数据,所述激光测距仪固定于巡检无人机下方,所述激光测距仪用于检测巡检无人机高度;
所述巡检无人机上固定有巡检扫描模块,所述巡检扫描模块用于采集巡检无人机侧面一周的建筑数据。
所述建模无人机和巡检无人机均包括陀螺仪。
所述激光雷达A、激光雷达B和激光雷达D采用4线激光雷达。
所述巡检扫描模块和建模扫描模块为机械旋转式激光雷达。
所述建模扫描模块安装于建模无人机或者巡检无人机上端面或者下端面,且所述建模无人机或者巡检无人机或者路径规划模块或者定位模块不对机械旋转式激光雷达造成干扰。
所述建模无人机和巡检无人机外部安装有防护罩。
所述建模无人机和巡检无人机均具有空间较大的ROM芯片,用于存储机械旋转式激光雷达的扫描数据。
所述防护罩包括:外壳和内壳;所述外壳和内壳均为网格壁组成的闭合腔体结构,从内至外依次设置有无人机、内壳和外壳,且所述内壳与无人机相对固定,所述外壳具有相对内壳转动的趋势。
所述防护罩还包括:电机和扭矩传感器,所述电机固定于内壳内壁,所述电机输出轴贯穿内壳后与外壳固定连接,所述电机驱动外壳相对内壳转动;
所述电机输出轴与外壳之间还设置有扭矩传感器,所述扭矩传感器与无人机电气连接。
所述内壳下端固定有转动杆,且转动杆与外壳通过轴承连接。
所述转动杆与电机的中轴共线。
所述外壳与内壳之间的间隙为:1.0mm~10mm。
所述内壳内壁与无人机之间通过连接杆相固定。
所述内壳包括上内壳和下内壳,所述上内壳与下内壳之间通过卡扣相固定。
所述外壳包括上外壳和下外壳,所述上外壳与下外壳之间通过卡扣相固定。
所述无人机为四旋翼无人机。
本发明与现有技术相比具有以下有益效果:
一、采用建模无人机首先对锅炉内壁进行3D扫描生成模型,一方面为后期巡检无人机提供路径规划基础,另一方面作为巡检无人机扫描数据对比基础,便于分析判断锅炉内壁改变参数及位置。
二、本发明采用无人机进行作业,可提高作业效率以及安全性,整体巡检精度和准确度高于人工巡检。
三、本发明激光测距仪和激光测距雷达,可精确测定无人机高度,避免因信号干扰或者锅炉内部气压变化造成无人机定位精度低或者定位不准确的问题。
附图说明
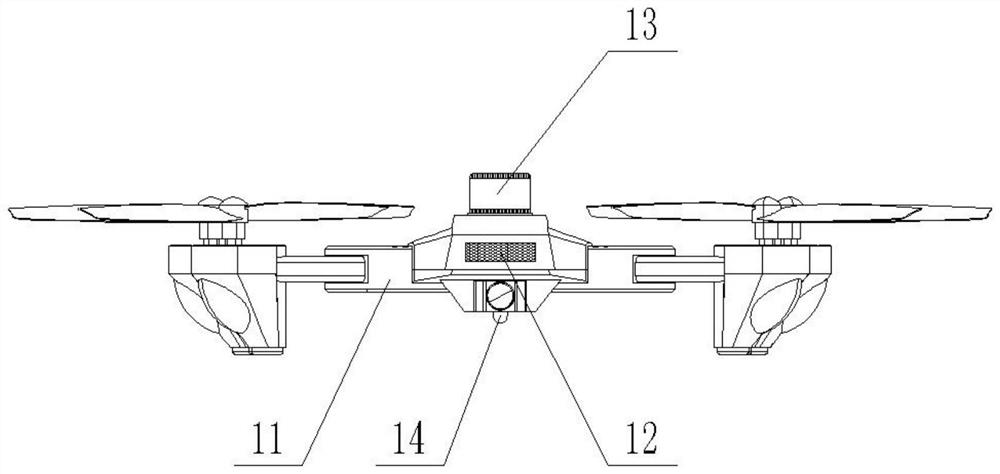
图1为本发明建模无人机结构示意图。
图2为本发明建模无人机侧面结构示意图。
图3为本发明建模无人机俯视结构示意图。
图4为本发明巡检无人机俯视结构示意图。
图5为本发明巡检无人机侧面结构示意图。
图6为本发明保护外罩结构示意图。
图中:11为建模无人机,12为路径规划模块,13为建模扫描模块,14为激光测距雷达,21为巡检无人机,22为定位模块,23为巡检扫描模块,121为激光雷达A,122为激光雷达B,221为激光雷达D,222为激光测距仪。
具体实施方式
为进一步理解本发明,下面结合附图和实施例详细阐述:
一种锅炉内壁巡检方法,所述锅炉内壁巡检步骤为:
第一步,锅炉内壁初始3D建模,具体3D建模步骤为:
1)在锅炉进风口或者烟囱位置设置飞行起点;
2)建模无人机11自飞行起点起飞,路径规划模块12开始工作,所述激光雷达A121采集建模无人机11上方物理环境数据,激光雷达B122采集建模无人机11至少一个侧面的物理环境数据,结合陀螺仪生成的惯性导航数据,分别绘制建模无人机11上方地图和建模无人机11某一侧面地图;
3)激光测距雷达14周期采集无人机距离飞行起点高度;
4)根据上方地图和侧面地图控制无人机在锅炉内飞行,每次飞行一定高度后启动建模扫描模块13生成锅炉内三维模型数据;
5)巡检扫描模块23扫描过程中,激光雷达D221采集参数用于计算建模无人机11侧面地图中的水平位置参数,激光测距雷达14启动用于计算建模无人机11高度参数,如此实现计算建模扫描模块13扫描过程中建模无人机11实时位置参数;
6)根据建模无人机11实时位置参数以及建模扫描模块13扫描数据,确定锅炉内壁三维坐标参数,如此大量的锅炉内壁三维坐标参数组合生成锅炉内壁建模3D模型;
第二步,锅炉内壁巡检,具体巡检步骤为:
1)在锅炉进风口或者烟囱位置设置飞行起点;
2)巡检无人机21自飞行起点起飞,巡检无人机21加载上方地图数据,启动激光测距仪222检测巡检无人机21高度,激光雷达D221与陀螺仪的数据采用Geo(slam)技术生成巡检无人机21某一侧面地图;
3)巡检无人机根据侧面地图和高度确定自身位置;
4)激光测距仪222周期采集巡检无人机距离飞行起点高度;
5)巡检无人机21根据上方地图以及自身位置参数自动规划巡检路径;
6)巡检无人机21每次飞行一定高度后启动巡检扫描模块23生成锅炉内三维模型数据;
7)建模扫描模块13扫描过程中,激光雷达D221采集参数用于计算巡检无人机21侧面地图中的水平位置参数,激光测距仪222启动用于计算巡检无人机21高度参数,如此实现计算巡检扫描模块23扫描过程中巡检无人机21实时位置参数;
8)根据巡检无人机21实时位置参数以及激光雷达D221扫描数据,确定锅炉内壁三维坐标参数,如此大量的锅炉内壁三维坐标参数组合生成锅炉内壁巡检3D模型;
第三步,锅炉内壁巡检3D模型与锅炉内壁建模3D模型数据对比,判断锅炉内壁形状或者结构改变以及锅炉内壁发生变化的具体位置,为后期维修提供指导。
一种锅炉内壁巡检系统,所述锅炉内壁巡检系统包括:建模无人机子系统和巡检无人机子系统;所述建模无人机子系统为巡检无人机子系统提供锅炉空间数据和锅炉内壁3D扫描建模数据。
所述建模无人机子系统包括:建模无人机11、路径规划模块12和建模扫描模块13;所述建模无人机11上端固定有路径规划模块12,所述建模无人机11上固定有建模扫描模块13,所述路径规划模块12和建模扫描模块13与建模无人机11电气连接;
所述路径规划模块12包括激光雷达A121和激光雷达B122,所述激光雷达A121信号检测面水平且面向上方,所述激光雷达A121用于采集建模无人机11上方物理环境数据,所述激光雷达B122检测方向指向建模无人机11侧面,所述激光雷达B122用于采集建模无人机11至少一个侧面的物理环境数据;
所述建模扫描模块13用于采集建模无人机11侧面一周的建筑数据。
所述建模无人机11上方还安装有激光测距雷达14,所述激光测距雷达14用于测量建模无人机11距离地面距离。
所述巡检无人机子系统包括:巡检无人机21、定位模块22和巡检扫描模块23;
所述巡检无人机21上固定有定位模块22,所述定位模块22包括:激光雷达D221和激光测距仪222,所述激光雷达D221固定于巡检无人机21侧面,所述激光雷达D221用于采集巡检无人机21至少一个侧面的物理环境数据,所述激光测距仪222固定于巡检无人机21下方,所述激光测距仪222用于检测巡检无人机21高度;
所述巡检无人机21上固定有巡检扫描模块23,所述巡检扫描模块23用于采集巡检无人机21侧面一周的建筑数据。
所述建模无人机11和巡检无人机21均包括陀螺仪。
所述激光雷达A121、激光雷达B122和激光雷达D221采用4线激光雷达。
所述巡检扫描模块23和建模扫描模块13为机械旋转式激光雷达。
所述建模扫描模块13安装于建模无人机11或者巡检无人机21上端面或者下端面,且所述建模无人机11或者巡检无人机21或者路径规划模块12或者定位模块22不对机械旋转式激光雷达造成干扰。
所述建模无人机11和巡检无人机21外部安装有防护罩。
所述建模无人机11和巡检无人机21均具有空间较大的ROM芯片,用于存储机械旋转式激光雷达的扫描数据。
所述防护罩包括:外壳31和内壳32;所述外壳31和内壳32均为网格壁组成的闭合腔体结构,从内至外依次设置有无人机、内壳32和外壳31,且所述内壳32与无人机相对固定,所述外壳31具有相对内壳32转动的趋势。
所述防护罩还包括:电机33和扭矩传感器34,所述电机33固定于内壳32内壁,所述电机33输出轴贯穿内壳32后与外壳31固定连接,所述电机33驱动外壳31相对内壳32转动;
所述电机33输出轴与外壳31之间还设置有扭矩传感器34,所述扭矩传感器34与无人机电气连接。
所述内壳32下端固定有转动杆35,且转动杆35与外壳31通过轴承连接。
所述转动杆35与电机33的中轴共线。
所述外壳31与内壳32之间的间隙为:1.0mm~10mm。
所述内壳32内壁与无人机之间通过连接杆相固定。
所述内壳32包括上内壳和下内壳,所述上内壳与下内壳之间通过卡扣相固定。
所述外壳31包括上外壳和下外壳,所述上外壳与下外壳之间通过卡扣相固定。
所述无人机为四旋翼无人机。
上述实施方式仅示例性说明本发明的原理及其效果,而非用于限制本发明。对于熟悉此技术的人皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改进。因此,凡举所述技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 一种锅炉内壁巡检方法及系统
- 一种锅炉膜式管迎火面侧内壁表面纵向线性缺陷检测系统及方法