一种大型试验箱自动装卸材料的装置
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及大型试验领域,特别是大型试验箱自动装卸领域。
背景技术
随着教育的高速发展,众多高等院校以及科研机构等开展的大型试验越来越多,而有些大型试验中需要大量的人力以及花费较多的时间进行材料的装卸(例如土工大型试验沙箱),这样会消耗人员体力,大大降低试验的效率。当今时代,机械自动化越来越普及,以机械的动作代替人力操作,自动化代替人的体力劳动,轻松地完成特定的作业。这样可以节省人力,节约时间,有效提高试验的效率。
工厂车间中会使用行车,但行车结构过于庞大、成本昂贵,且不能自动装取土、沙等细散物质,对于试验方面实用性不强,并不适合实验室使用。
发明内容
本发明旨在提供一种大型试验箱自动装卸材料的装置,以解决现有大型试验需要大量人力和时间进行装卸材料,效率较低的问题。
为了实现上述目的,本发明采用了如下技术方案:
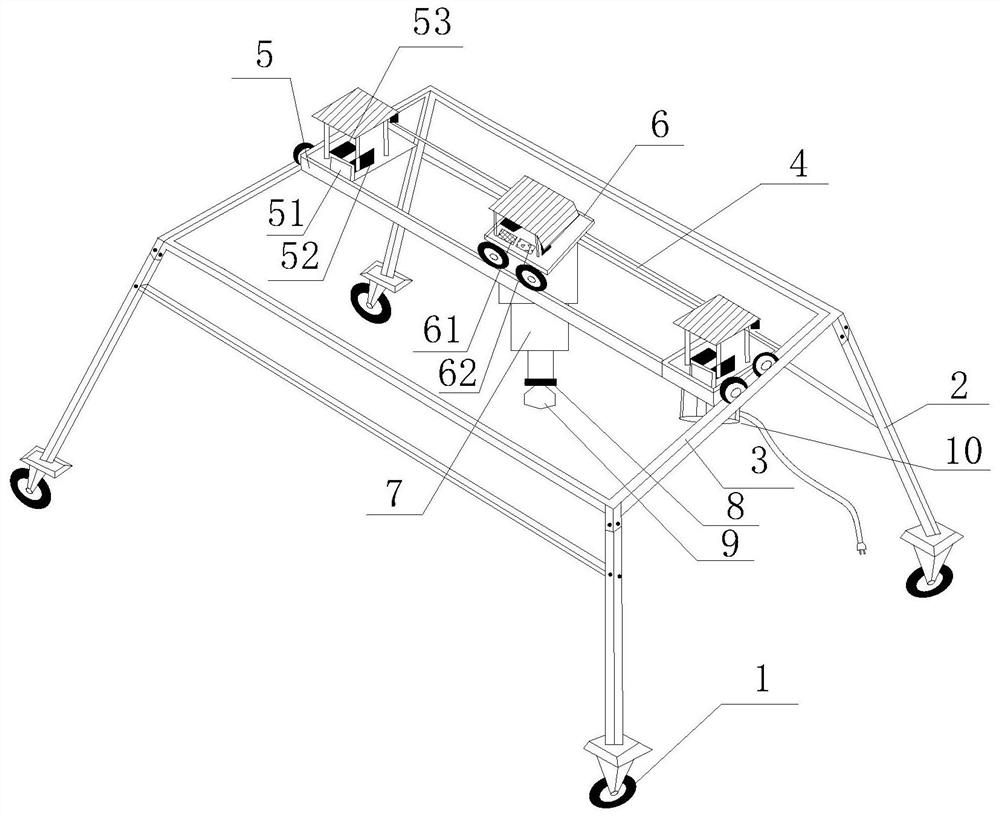
一种大型试验箱自动装卸材料的装置,包括塔架2,所述塔架2下端设置滚轮1,所述塔架2上端两侧设置有纵向轨道3,所述纵向轨道3上分别安装有纵向小车5,两个所述纵向小车5间固定连接横向轨道4,所述横向轨道4上安装有横向小车6,所述横向小车6下端固定连接液压伸缩臂7,所述液压伸缩臂7自由端固定连接自动抓手控制器8,所述自动抓手控制器8下端连接自动抓手9。
进一步的,所述自动抓手9包括左抓手91、右抓手92、抓手固定装置93,所述抓手固定装置93连接在自动抓手控制器8上,所述自动抓手控制器8控制左抓手91、右抓手92开合。
进一步的,所述左抓手91和右抓手92均为半包围结构且可以紧密对接形成封闭空腔。
进一步的,所述纵向小车5包括嵌入式无线通讯单元51、嵌入式PLC控制模块52和小车行走装置53,所述嵌入式无线通讯单元51、嵌入式PLC控制模块52和小车行走装置53均设置于纵向小车内部。
进一步的,所述横向小车6包括嵌入式无线通讯单元、嵌入式PLC控制模块、小车行走装置、自动抓手控制装置61和液压伸缩臂控制装置62,所述嵌入式无线通讯单元、嵌入式PLC控制模块、小车行走装置、自动抓手控制装置61和液压伸缩臂控制装置62均置于横向小车内部。
进一步的,还包括一无线传输系统,所述无线传输系统包括分别连接至无线传输系统控制主机和嵌入PLC控制模块52的主机无线通讯单元以及嵌入无线通讯单元51,所述嵌入式PLC控制模块52通过所述无线传输系统与控制主机通讯连接,控制指令的接收。
与现有技术相比,本发明提供了一种大型试验箱自动装卸材料的装置,具备以下有益效果:
1、该大型试验箱自动装卸材料的装置,通过操作纵向小车和横向小车靠近目标物,可以实现更精确的抓取动作。
2、该大型试验箱自动装卸材料的装置设置自动抓手,通过自动抓手可以抓取细、散物质。
该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本发明能够自动抓取细、散物质,节约人力和时间,提高了大型试验的效率。
附图说明
下面结合附图和实施例对本发明进一步说明。
图1为一种大型试验箱自动装卸材料的装置结构示意图;
图2为液压伸缩臂、自动抓手控制器和自动抓手剖面图;
图3为自动抓手结构示意图。
图4为自动抓手剖面图。
图中:1滚轮、2塔架、3纵向轨道、4横向轨道、5纵向小车、51嵌入式无线通讯单元、52嵌入式PLC控制模块、53小车行走装置、6横向小车、61液压伸缩臂控制装置、62自动抓手控制装置、7液压伸缩臂、8自动抓手控制器、9自动抓手、91右抓手、92左抓手、93抓手固定装置、94抓手开合控制装置、10电机。
具体实施方式
为进一步说明各实施例,本发明提供有附图。这些附图为本发明揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理。配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本发明的优点。图中的组件并未按比例绘制,而类似的组件符号通常用来表示类似的组件。
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面现结合附图和具体实施方式对本发明进一步阐述。
结合图1所示,该实施例提供了一种大型试验箱自动装卸材料的装置,包括滚轮1、塔架2、纵向轨道3、横向轨道4、纵向小车5、横向小车6、液压伸缩臂7、自动抓手控制器8、自动抓手9和电机10。
所述塔架2包括一八字形的龙门架,所述塔架的顶端设有纵向轨道3、横向轨道4,该纵向小车5、横向小车6设有分别与该纵向轨道3、横向轨道4适配的滚轮机构,所述纵向小车5安装在纵向轨道3上且可沿纵向轨道3移动,所述横向小车6安装在横向轨道4上且可沿横向轨道4移动。
所述塔架2底端设置滚轮1,所述滚轮1组成用于移动该塔架2的行走装置。所述滚轮1可以转动以及360度转向,实现塔架2整体的移动。
所述纵向小车5、横向小车6内均设有与小车的滚轮传动连接的小车行走装置53,以用于驱动小车的滚轮,使所述纵向小车5、横向小车6能分别沿纵向轨道3、横向轨道4移动。纵向小车5包括嵌入式无线通讯单元51、嵌入式PLC控制模块52和小车行走装置53,通过嵌入式无线通讯单元51、嵌入式PLC控制模块52可以控制纵向小车5沿着纵向轨道3运动,小车行走装置53驱动纵向小车5运动。横向小车6包括嵌入式无线通讯单元、嵌入式PLC控制模块、小车行走装置、自动抓手控制装置61和液压伸缩臂控制装置62,通过嵌入式无线通讯单元、嵌入式PLC控制模块可以控制横向小车6沿着横向轨道4运动,小车行走装置驱动横向小车6运动;通过自动抓手控制装置61可以控制自动抓手控制器8从而操作自动抓手9的开合,通过液压伸缩臂控制装置62可以控制液压伸缩臂7的伸缩。
结合图1和图2所示,该自动抓手9通过液压伸缩臂7以及自动抓手控制器8悬挂于所述横向小车6的下方,且液压伸缩臂7与横向小车6固定连接,自动抓手控制器8与液压伸缩臂7固定连接,自动抓手9与自动抓手控制器8固定连接,以实现沿所述横向轨道4的移动及自动伸缩和抓取功能,进而实现了目标物的装夹及搬运。
再结合图3和图4,该自动抓手9包括左抓手91、右抓手92、抓手固定装置93和抓手开合控制装置94。通过抓手固定装置93使自动抓手9与自动抓手控制器8固定连接,自动抓手控制器8控制连接抓手开合控制装置94的液压缸进行伸缩,从而控制自动抓手9的左抓手91、右抓手92的自动开合。
在一些实施例中,所述的抓手固定装置93为铰接轴,所述自动抓手控制器8设置有外壳,抓手固定装置93铰接在外壳上,实现左抓手91、右抓手92的可枢转连接。
至与的左抓手91、右抓手92的开合,也可以在两个抓手的驱动臂关节上设置伺服电机,也可以在通过在自动抓手控制器8外壳和两个抓手的驱动臂之间设置液压杆,这是本领域的常规设置,在此不再赘述。
为实现大型试验箱自动装卸材料装置的控制,该实施例还具有一控制系统,该控制系统包括遥控器、一控制主机以及一嵌入式PLC控制模块52。该实施例中,该控制主机设于控制机房内,在该嵌入式PLC控制模块52分别设于纵向小车5、横向小车6上,且该嵌入式PLC控制模块52分别电性连接主机与小车;该嵌入式PLC控制模块52还电性连接至液压伸缩臂7以及自动抓手控制器8,以实现对该自动抓手9位置以及工作状态的控制。
由于该控制主机设于控制机房内,该嵌入式PLC控制模块52设于纵向小车5、横向小车6上,该实施例还设有一无线传输系统,所述无线传输系统包括连接至该控制主机的主机无线通讯单元和连接至该嵌入式PLC控制模块52的嵌入式无线通讯单元51;该嵌入式无线通讯单元51与该主机无线通讯单元通讯连接,以使该嵌入式PLC控制模块52通过该无线传输系统与该控制主机通讯连接,以实现将命令发送至该控制主机,由该控制主机运算处理,并接收该控制主机发出的控制指令,以控制自动抓手9运动。
该实施例的工作过程如下:
首先,操作人员通过操作遥控器,遥控器具有横向左右移动,纵向前后移动、液压伸缩臂7伸缩以及自动抓手9开、合功能;遥控器命令通过无线通讯单元51传送到主机无线通讯单元。
其次,主机无线通讯单元通讯收到命令后作出指示,指示由主机无线通讯单元传送到无线通讯单元51,无线通讯单元51进而把命令传给嵌入式PLC控制模块52。
再次,嵌入式PLC控制模块控制该纵向小车5、横向小车6的小车行走装置、液压伸缩机7以及自动抓手控制器8工作,自动抓手控制器8控制自动抓手9工作。进而,该大型试验箱自动装卸材料的装置完成相应动作。
优选的,由于液压伸缩臂7、自动抓手控制器8和自动抓手9移动以横向小车6的移动为主,则该液压伸缩臂7必须与横向小车6固定连接,该自动抓手控制器8必须与液压伸缩臂7固定连接,该自动抓手9必须与自动抓手控制器8固定连接。
优选的,本装置设置无线控制系统,以现有技术为主,该无线控制系统配备机房。
本发明可通过控制器无线遥控,从而更好的节约人力,提高效率;本发明通过自动抓手的设计,可以抓取土和细沙等细散物质,更加具备实用性;本发明为装配形式组装,除液压伸缩臂之外的部件都可拆卸,方便运输,应用范围更广,且该装置方便进行改进,如增加加压装置、红感自动定位仪等,用途更加广泛。
尽管结合优选实施方案具体展示和介绍了本发明,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本发明的精神和范围内,在形式上和细节上可以对本发明做出各种变化,都应涵盖在本发明的保护范围之内。
- 一种大型试验箱自动装卸材料的装置
- 一种大型试验箱用的双向自动压力平衡口装置