一种航空发动机显式预测控制器的设计方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明提供了一种航空发动显式预测控制器的设计方法,属于航空宇航推进理论与工程中的系统控制与仿真领域。
背景技术
航空发动机是具有强非线性、多变量耦合的复杂非线性系统,实际工作过程中还要考虑环境中的噪声和执行机构幅值限制、速率限制等约束的影响。传统航空发动机控制系统基于单变量控制器实现对目标值的跟踪,并通过Max-Min选择逻辑实现约束管理。但这种约束管理方法并不能保证受限控制器输出在所有情况下都不超限,在过渡态和某些极端环境下依然可能出现部分物理量超限,给航空发动机的安全运行带来隐患。因此,针对带约束的多变量控制理论具有重大的研究意义。模型预测控制将控制问题简化为二次规划问题,通过反复在线滚动优化,求解带约束情况下的最优控制律,可以很好的解决多变量和约束管理问题,在炼油化工等慢动态领域已经有大量的应用。但是一方面当问题规模较大以及系统动态变化较快的情况下,如电机控制、汽车高频振动以及航空领域,其在线计算量和需要的存储空间将会比较大,这限制了模型预测控制在快速动态领域的应用;另一方面模型预测控制的反复在线计算特点使得闭环预测控制属于一类复杂的非线性系统,很难建立该系统的输入与输出之间的显式表达式,从而无法分析该闭环系统的稳定性和鲁棒性等。显式模型预测控制将多参数规划理论引入到线性时不变对象的约束二次优化控制问题的解中,将系统的状态区域进行凸划分,在离线计算阶段得到对应每个状态分区上的状态反馈最优显式控制律,在线计算阶段通过查表确定当前状态所在的分区,大大减少了计算量,为硬件在环和半实物仿真试验提供了理论基础。目前为止,没有专利公开基于航空发动机的显式预测控制器的设计方法并开展硬件在环仿真试验。
发明内容
为了解决传统模型预测控制算法在实际应用中存在运算量大、实时性较差的问题,本发明提出了一种基于多参数规划的显式模型预测控制器设计方法。
一种航空发动机显式模型预测控制器设计方法,包括以下步骤:
第一步,获得航空发动机状态变量模型;
第二步,设计显式模型控制器;
第三步,数值仿真和硬件在环仿真。
现具体阐述如下:
第一步,获得航空发动机状态变量模型;
根据航空发动机工作原理,发动机输出高压转子转速与主燃油相关性比较强,输出涡轮落压比与尾喷管面积相关性比较强。采用系统辨识法,由于求解的各控制变量之间一般相差多个数量级,为了数值计算的稳定性,首先需要对状态变量模型归一化。归一化完成后,在标准工况点分别对燃油和尾喷管面积控制量施加小阶跃扰动,其他控制量不变,得到发动机输出的多个非线性动态响应序列,由拟合法思想可得到关于状态变量模型参数矩阵的多变量最小二乘方程,求解参数方程即可获得航空发动机状态变量模型。
第二步,设计显式模型控制器;
显式模型预测控制算法包括离线计算和在线计算,离线计算应用多参数规划方法对系统的状态区域进行凸划分,并得到每个状态区上的状态反馈最优控制律,在线计算时只需确定当前时刻系统状态所处的分区并线性计算得到当前时刻的最优控制量。显式模型预测控制通过离校计算和在线计算大幅度减少了计算量,为控制器的硬件在环仿真提供了理论基础。
第三步,数值仿真和硬件在环仿真。
为了验证辨识得到的状态变量模型和设计的显式模型预测控制器的性能,在不同的工况点,设置不同的油门杆角度使航空发动机在起动到慢车、中间状态完成稳态和过渡态控制,同时验证显式模型预测控制的鲁棒性。完成数值仿真以后,在simulink中利用RTW工具箱生成嵌入式C代码,然后基于MPC55xx处理器进行硬件在环仿真试验。由于硬件在环仿真系统存在着大量的干扰,因此硬件在环仿真可以很好的验证控制器的鲁棒性,同时嵌入式处理器也能验证控制器的实时性。
本发明的有益效果:
传统模型预测控制算法需要在每个控制周期在线求解一个二次规划问题,无法满足航空发动机硬件在环仿真试验实时性的需求。本发明采用一种基于参数规划的显式模型预测控制设计策略,为模型预测控制的嵌入式应用提供了参考。数值仿真和硬件在环仿真表明,显式模型预测在完成航空发动机稳态和过渡态控制的同时,还具有优异的约束管理能力,满足嵌入式系统实时性要求。本发明操作简单,可行性强,为现代控制理论在FADEC上的应用提供了参考。
附图说明
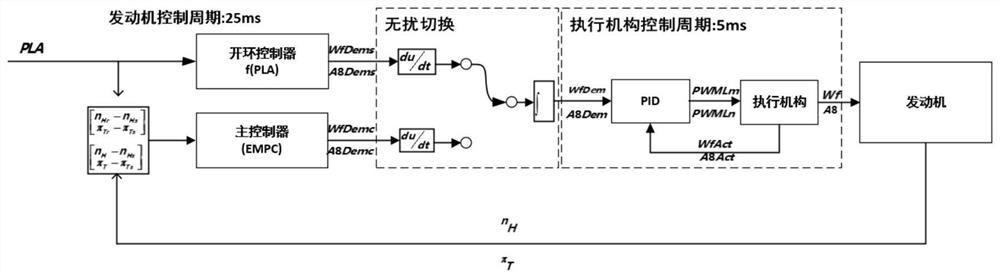
图1是多变量控制架构图。
图2是硬件在环仿真系统结构图。
图3是辨识得到的航空发动机线性模型和非线性模型的阶跃曲线。
图4是航空发动机在H=0km,Ma=0工况下燃油曲线。
图5是是航空发动机在H=0km,Ma=0工况下尾喷管面积曲线。
图6是航空发动机在H=0km,Ma=0工况下高压转子响应曲线。
图7是航空发动机在H=0km,Ma=0工况下压比响应曲线。
图8是航空发动机在H=10km,Ma=1.5工况下燃油曲线。
图9是是航空发动机在H=10km,Ma=1.5工况下尾喷管面积曲线。
图10是航空发动机在H=10km,Ma=1.5工况下高压转子响应曲线。
图11是航空发动机在H=10km,Ma=1.5工况下压比响应曲线。
图12是航空发动机在H=0km,Ma=0工况下硬件在环燃油曲线。
图13是是航空发动机在H=0km,Ma=0工况下硬件在环尾喷管面积曲线。
图14是航空发动机在H=0km,Ma=0工况下硬件在环高压转子响应曲线。
图15是航空发动机在H=0km,Ma=0工况下硬件在环压比响应曲线。
具体实施方式
为了使本发明的目的、技术及优点更加清楚明白,以下结合附图及实例,对本发明进行进一步详细说明。
本发明是一种航空发动机显式模型预测控制器设计方法,具体设计步骤如下:
步骤1.获得航空发动机状态变量模型
在飞行条件一定情况下,设航空发动机的离散型非线性模型为:
式中x∈R
在平衡点(x
式中Δx
由于各变量之间相差多个数量级,为了数值计算的稳定性,需要对该状态变量模型进行归一化处理。引入对角元素分别为向量x
式中,
对发动机的各控制量分别作小阶跃扰动而保持其他控制变量不变,即:
式中,
∈
在式(4)所表示的控制变量作用下,发动机将经历m个不同的过渡过程,其非线性动态响应序列分别为
因此,
式中,K为采样点个数。求解式(5)所示最小二乘问题,反归一化得到系统矩阵:
将状态空间模型(2)作为显式模型预测控制器的预测模型。
步骤2.设计显式模型控制器;
考虑线性时不变系统:
满足状态和控制输入的约束条件:
Ex(t)+Lu(t)≤Mt>0 (7)
式(6)中x(t)∈R
定义二次性能目标函数:
其中,矩阵P≥0,Q≥0,R≥0为对称矩阵,矩阵P通过在假定K≥N约束不起作用时由代数黎卡提方程求得:
K=-(R+B′PB)-
P=-(A+BK)′P(A+BK)+K′RK+Q
考虑约束线性时不变系统的有限时间最优控制问题:
其中x
χ
根据模型预测控制算法的滑动时域控制策略,每一时刻实际作用到被控对象上的控制信号为优化问题(9)的最优决策向量
因而模型预测控制系统每一时刻作用到系统的控制信号为分段线性状态反馈信号,由于系统为时不变的,因而
因而,闭环预测控制系统可以转化为如下形式:
当x(t)∈CR
当系统方程为:
对应闭环预测控制系统的PWA模型为:
为了进一步说明本发明中辨识得到的线性模型和显式模型预测控制器的控制效果,通过几组仿真实验,来验证本发明中方法的有效性。
(1)线性辨识模型阶跃响应
针对某型小涵道比军用涡扇发动机,取u=[Wf,A8]
发动机非线性模型和状态变量模型的主燃油和压比小阶跃响应曲线如说明书附图3所示,由附图3可知,高压转子转速平均拟合精度为99.98%,曲线拟合程度很高,涡轮落压比平均拟合精度为98.84%,曲线拟合程度略低,这是因为压比等于涡轮出口与进口压力之比,使压比输出表现出较强得非线性。综合来看,辨识模型可以用来作为显式模型预测控制器的预测模型
(2)数值仿真
本发明选择H=0km,Ma=0和H=10km,Ma=1.5两个包线点,根据航空发动机控制理论,设计如说明书附图1所示的多变量控制结构,仿真结果如图说明书附图4-11所示,图中实线为目标值,虚线为发动机模型被控输出值。由图可知,航空发动机可实现从起动到慢车、中间等状态的稳态和过渡态控制,同时满足执行机构和输出约束。高压转子转速超调不超过±0.25%,稳态误差不超过±0.1%,落压比稳态控制精度不超过±0.1%。在图10-11中,转速和压比在起动阶段出现执行机构饱和现象,这是因为高度马赫数变化时,发动机模型非线性变强,但是整体上EMPC表现了优异的鲁棒性。
(3)硬件在环仿真
实际环境中存在的延时、噪声等干扰会对航空发动机控制系统产生较大的影响,硬件在环仿真是验证控制系统鲁棒性的重要环节。首先完成EMPC控制器的数值仿真,利用RTW的自动代码生成技术,生成嵌入式处理器可用的C/C++代码,并导入到嵌入式处理器codewarrior工程中,经过编译得到60KB的二进制bin文件,小于MPC55xx处理器512KB的内存限制。
按照说明书附图2所示的架构搭建硬件在环仿真系统,在H=0km,Ma=0状态点进行试验,由于仿真系统噪声容易导致控制系统触碰执行机构饱和限制,将执行机构约束设置为[0,0.42]
- 一种航空发动机显式预测控制器的设计方法
- 一种基于模型预测的航空发动机在线优化及多变量控制设计方法