一种电动舵机
文献发布时间:2023-06-19 10:06:57
技术领域
本发明属于电动舵机技术领域,具体涉及一种小型轻便的电动舵机。
背景技术
电动舵机常作为飞行器控制系统中的执行部件,在航空领域已经广泛应用。目前无人机动力系统发动机节气门的控制多采用节气门底电动机构,体积较大且偏重,节气门阀门控制位置精度不高,影响无人机飞行状态,并且由于系统中空间位置有限,导致拆装困难。
现有电动舵机多采用反馈电位计采集输出位置,电位计是通过旋转改变阻值输出,其内部装有电阻片,电阻片有角度限制,因此旋转角度有限制,另外电位计只能以电阻阻值零点设置为位置“起点”。
发明内容
本发明的目的在于提供一种电动舵机,其特点包括体积小、重量轻、拆装便捷、输出位置精度高(达到±0.05°以内)、可360°旋转无角度限制并任意设定其输出位置“起点”和“终点”,同时输出轴端采用简便一字槽型,能够直接与节气门控制阀连接,省去拉杆装置,能在有限空间满足安装要求。
本发明采用编码器采集输出位置,其原理是通过旋转上方空间的磁体产生周期空间变化磁场信号,转化为电阻值变化,经过信号转换处理实现编码器编码功能采集输出位置。编码器内部采用非接触式磁敏元件,所以采集输出位置可以360°旋转无角度限制。
本发明的技术方案为:
一种电动舵机,包括舵机壳体,所述舵机壳体内设置有输出轴、电机、减速机构、控制板、编码器和圆磁体,所述电机和输出轴通过减速机构相连,所述输出轴尾端连接圆磁体;所述控制板安装在舵机壳体内底部位置,位于电机与输出轴尾端正下方;所述编码器焊接在控制板上,位于圆磁体正下方;所述舵机壳体上设有安装板,所述舵机壳体外连接有连接器;所述连接器与控制板、所述控制板与电机之间通过导线连接。
进一步地,减速机构包括:多个逐级啮合的齿轮组件。
进一步地,齿轮组件包括:小齿轮(齿数少)与大齿轮(齿数多)同轴串联组合。
进一步地,输出轴轴端采用简便一字槽型,输出轴尾端粘接圆磁体。
所述圆磁体旋转时产生周期分布的空间漏磁场,编码器通过磁电阻效应将旋转变化的磁场信号转化为电阻值的变化,经过信号处理,识别出输出轴转动位置信息。
本发明优点在于:
(1)所述电动舵机内部采用集成化形式进行合理布局,将电机和输出轴之间通过减速机构并行联接,编码器集成到控制板上。
(2)外部通过输出轴采用一字槽型便捷的接口形式,可直接与被控部件连接,省去了拉杆装置,提高安装便捷性。
(3)位置反馈装置采用编码器,其有效分辨率可达14位,输出角度位置精度可高达±0.05°,同时编码器可采集360°旋转位置信息无角度限制,并根据需要任意设定其输出位置“起点”和“终点”。
(4)所述电动舵机实现了结构小型化,安装便捷化,输出位置具有可控性、精度高等特点,同时大大提升了电动舵机的应用范围。
附图说明
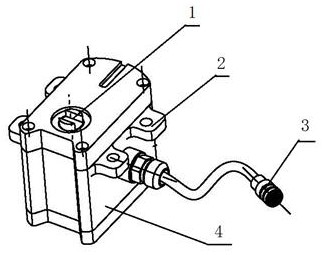
图1为本发明电动舵机的示意图;
图2为电动舵机内部结构剖视图;
图3为编码器原理示意图。
图中:1-输出轴,2-安装板,3-连接器,4-舵机壳体,5-电机,6-减速机构,7-齿轮组件,8-控制板,9-编码器,10-圆磁体。
具体实施方式
下面结合附图和实施例对本发明进行详细说明。
实施例
如图1-2所,本发明公开了一种电动舵机,包括舵机壳体4,所述舵机壳体4内设置有输出轴1、电机5、减速机构6、控制板8、编码器9和圆磁体10,所述电机5和输出轴1通过减速机构6相连,所述输出轴1尾端粘接圆磁体10;所述控制板8安装在舵机壳体4内底部位置,位于电机5与输出轴1尾端正下方;所述编码器9焊接在控制板8上,位于圆磁体10正下方;所述舵机壳4体上设有安装板2,所述舵机壳体外连接有连接器3。
所述连接器3与控制板8、控制板8与电机5之间通过导线连接传递电信号与控制信号。
所述减速机构6包括多个逐级啮合的齿轮组件,将电机5与输出轴1并行联接。
所述输出轴1轴端采用一字槽型接口形式。
将电动舵机通过安装板2上的定位孔固定,将输出轴1轴端的一字槽直接与被控部件连接,控制板8通过连接器3接收舵角偏转目标值(可按需求任意设定),并采集舵角偏转当前值,根据偏差计算控制量输出PWM脉冲指令,该指令控制电机5转动,电机5转动通过减速机构6传递至输出轴1,带动输出轴1转到指令位置。
如图3所示,圆磁体10随输出轴1同步转动,产生周期分布的空间漏磁场,其下方编码器9通过磁电阻效应将旋转变化的磁场信号转化为电阻值的变化,经过信号处理,识别出舵角转动位置信息,反馈上传舵角偏转当前值。编码器9内部采用非接触式磁敏元件,所以采集输出位置可以360°旋转无角度限制。可以任意设至输出 “起点”和“终点”位置。
优选地,在本发明一个实施例中,编码器9采用角度编码器芯片MT6825,其有效分辨率可达14位(4096线),其输出角度精度高达±0.05°以内。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围内,因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 一种电动舵机信号采集系统及电动舵机数字控制器
- 电动舵机、电动舵机零位标定方法、装置和存储介质