一种智能汽车车载惯性导航系统标定测试方法
文献发布时间:2023-06-19 10:22:47
技术领域
本发明涉及惯性导航系统测试技术领域,更具体为一种智能汽车车载惯性导航系统标定测试方法。
背景技术
高精度行车定位技术以及高精度地图技术是自动驾驶汽车的两项核心技术,也是自动驾驶破局的关键点。其中,对高精度的定义是误差范围要达到厘米级,这是实现行车安全的客观要求所决定的——如果误差超过几十厘米,两辆车就很可能相撞。
惯性导航是一种完全自主的导航系统,不需要外部参考与支持,这一特点使它自然地不受外界的干扰或欺骗。因此现在飞机,潜艇,导弹和各种航天器上,除了安装有GPS导航系统,也都装备精密的惯性导航系统。
惯性导航系统主要有两个作用,一个是在GPS信号丢失或者很弱的情况下,暂时填补GPS留下的空缺,用积分法取得最接近真实的三维高精度定位。中国大城市高楼林立,即便是北斗加GPS加GLONASS,卫星导航信号还是有很多无法覆盖的地方,特别是以北京为代表的北方高纬度地区。北方卫星导航仰角都不高,如果仰角不超过48度,卫星发出的信号由于受地面高层建筑物的遮挡,实际只能覆盖城市面积的30%。而日本的QZSS系统可以保证任何时候日本上空都有一颗仰角超过70度的卫星,东京地区高达85度,可以覆盖任何高层楼区。所以市区的无人驾驶,惯性导航系统必不可少。
在车辆道路上行驶时,路面的颠簸将会引起车辆发生俯仰、侧倾和横摆的运动,这些角运动与车辆行驶速度和地面的不平度具有密切联系。由于车辆行驶路况的种类较多,而且车速变化范围大,故对于导航系统的标定必须随着车辆行驶路况的随机变化而事实改变。若在实际路面上进行测试标定,会占用大量的资源,而且效率低下,数据的重复性很差,需要针对性的反复标定。因此,需要提供一种新的技术方案给予解决。
发明内容
本发明的目的在于提供一种智能汽车车载惯性导航系统标定测试方法,解决了现有技术中在实际路面上进行测试标定,会占用大量的资源,而且效率低下,数据的重复性很差,需要针对性的反复标定的问题。
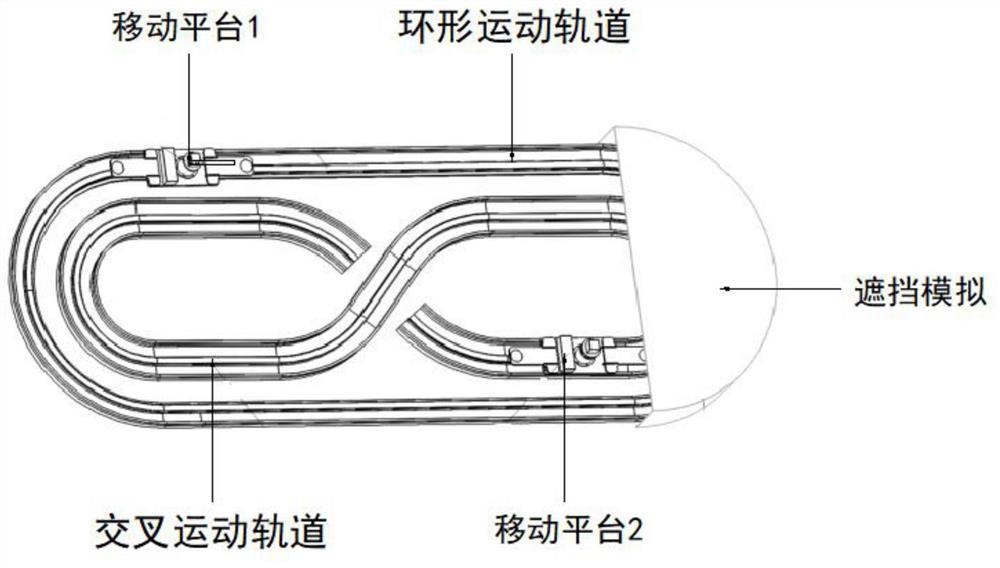
为实现上述目的,本发明提供如下技术方案:一种智能汽车车载惯性导航系统标定测试方法,包括:车载惯性导航系统标定装置,所述车载惯性导航系统标定装置由两组移动平台、环形运动轨道、交叉运动轨道、遮挡模拟以及控制系统组成,其中环形运动轨道和交叉运动轨道采用地下布置,两组移动平台处于地面之上且分别安装在环形运动轨道和交叉运动轨道上,环形运动轨道和交叉运动轨道的形状及轨迹预先精确测量并标定。
作为本发明的一种优选实施方式,车载惯性导航系统的位置及姿态参数,采用设备移动平台自带的磁栅尺进行数据对标,设备自带的磁栅尺一般可以达到微米级精度,远远覆盖惯导系统的测量精度。
作为本发明的一种优选实施方式,车载惯性导航系统的位置及姿态参数的标定方法如下:
步骤1:选择环形运动轨道和交叉运动轨道其中一种,调整惯性导航系统的安装位置及安装姿态;
步骤2:按照路面和车辆要求,导入响应的载荷谱数据,启动垂向振动装置;
步骤3:运动平台按照一定的距离间隔进行定位,同时记录惯性导航系统的定位及姿态测量结果及运动平台的位置测量结果;
步骤4:绘制标定曲线,并按照需要的方法进行数据拟合,重复迭代验证;
步骤5:更换轨道,重复上述试验。
作为本发明的一种优选实施方式,车载惯性导航系统的速度及加速度参数,需要采用设备伺服驱动电机自带的编码器进行测量。
作为本发明的一种优选实施方式,车载惯性导航系统的速度及加速度标定方法如下:
步骤1:选择环形运动轨道和交叉运动轨道其中一种,调整惯性导航系统的安装位置及安装姿态;
步骤2:按照路面和车辆要求,导入响应的载荷谱数据,启动垂向振动装置;
步骤3:设定运动速度及加速度,控制运动平台以设定的参数控制电机进行加减速运动;
步骤4:绘制标定曲线,并按照需要的方法进行数据拟合,重复迭代验证;
步骤5:更换轨道,重复上述试验。
与现有技术相比,本发明的有益效果如下:
本发明采用智能汽车车载惯性导航系统标定装置,对惯性导航系统的主要技术参数进行标定,包括惯导系统的位置、速度、姿态、三向加速度等参数,车载惯性导航系统标定装置,主要由移动平台、环形运动轨道、交叉运动轨道、遮挡模拟以及控制系统等组成,轨道采用地下布置,移动平台处于地面之上,轨道的形状及轨迹预先精确测量标定。
附图说明
图1为本发明惯性导航系统标定装置流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,本发明提供一种技术方案:一种智能汽车车载惯性导航系统标定测试方法,包括:车载惯性导航系统标定装置,所述车载惯性导航系统标定装置由两组移动平台、环形运动轨道、交叉运动轨道、遮挡模拟以及控制系统组成,其中环形运动轨道和交叉运动轨道采用地下布置,两组移动平台处于地面之上且分别安装在环形运动轨道和交叉运动轨道上,环形运动轨道和交叉运动轨道的形状及轨迹预先精确测量并标定。
进一步改进的,如图1所示,车载惯性导航系统的位置及姿态参数,采用设备移动平台自带的磁栅尺进行数据对标,设备自带的磁栅尺一般可以达到微米级精度,远远覆盖惯导系统的测量精度。
进一步改进的,如图1所示,车载惯性导航系统的位置及姿态参数的标定方法如下:
步骤1:选择环形运动轨道和交叉运动轨道其中一种,调整惯性导航系统的安装位置及安装姿态;
步骤2:按照路面和车辆要求,导入响应的载荷谱数据,启动垂向振动装置;
步骤3:运动平台按照一定的距离间隔进行定位,同时记录惯性导航系统的定位及姿态测量结果及运动平台的位置测量结果;
步骤4:绘制标定曲线,并按照需要的方法进行数据拟合,重复迭代验证;
步骤5:更换轨道,重复上述试验。
进一步改进的,如图1所示,车载惯性导航系统的速度及加速度参数,需要采用设备伺服驱动电机自带的编码器进行测量。
进一步改进的,如图1所示,车载惯性导航系统的速度及加速度标定方法如下:
步骤1:选择环形运动轨道和交叉运动轨道其中一种,调整惯性导航系统的安装位置及安装姿态;
步骤2:按照路面和车辆要求,导入响应的载荷谱数据,启动垂向振动装置;
步骤3:设定运动速度及加速度,控制运动平台以设定的参数控制电机进行加减速运动;
步骤4:绘制标定曲线,并按照需要的方法进行数据拟合,重复迭代验证;
步骤5:更换轨道,重复上述试验。
本发明采用智能汽车车载惯性导航系统标定装置,对惯性导航系统的主要技术参数进行标定,包括惯导系统的位置、速度、姿态、三向加速度等参数,车载惯性导航系统标定装置,主要由移动平台、环形运动轨道、交叉运动轨道、遮挡模拟以及控制系统等组成,轨道采用地下布置,移动平台处于地面之上,轨道的形状及轨迹预先精确测量标定。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能汽车车载惯性导航系统标定测试方法
- 一种智能汽车车载惯性导航系统标定装置