复合式移动机器人
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及机器人领域,具体是复合式移动机器人。
背景技术
机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人。现在虽然还没有一个严格而准确的机器人定义,但是我们希望对机器人的本质做些把握:机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、服务业、建筑业甚至军事等领域中均有重要用途。
传统的机器人在进行移动时,整体的移动方式比较简单,都是通过履带式,或者是轮子的方式进行移动,这样的移动效果相对来说比较差,不能够适用于各种不同的环境,在一些非常复杂的环境中,机器人的移动不足以满足现在的使用要求,整个操作者在操作时容易造成机器人倾倒等一些情况的发生,同时在一些比较干净的地面时,如果是通过履带式移动会造成地面的损坏,整体的使用方式不能进行变换,难以满足使用要求。
因此,本领域技术人员提供了复合式移动机器人,以解决上述背景技术中提出的问题。
发明内容
本发明的目的在于提供复合式移动机器人,以解决上述背景技术中提出的传统的机器人在进行移动时,整体的移动方式比较简单,都是通过履带式,或者是轮子的方式进行移动,这样的移动效果相对来说比较差,不能够适用于各种不同的环境,在一些非常复杂的环境中,机器人的移动不足以满足现在的使用要求,整个操作者在操作时容易造成机器人倾倒等一些情况的发生,同时在一些比较干净的地面时,如果是通过履带式移动会造成地面的损坏,整体的使用方式不能进行变换,难以满足使用要求的问题。
为实现上述目的,本发明提供如下技术方案:
复合式移动机器人,包括顶面连接板和支撑柱底框,所述顶面连接板的底面固定连接有固定液压缸,所述顶面连接板的前侧面焊接有挡风板,所述挡风板的另一端焊接有托板支撑柱,所述固定液压缸的底面固定连接有液压支杆,所述液压支杆的底面焊接有电机安装板,所述电机安装板的底面固定安装有驱动电机,所述驱动电机的输出轴套接有连接杆,所述驱动电机的底部设有复合移动机构A和复合移动机构B,所述支撑柱底框的顶面固定连接有托板支撑柱,所述托板支撑柱的顶面固定连接有支撑架托板,所述托板支撑柱的底面固定连接有履带支撑架A和履带支撑架B,所述支撑架托板的顶面固定连接有三角支撑架,所述三角支撑架的顶面焊接有支撑衔接块,所述支撑衔接块的顶面焊接有斜体支撑杆,所述斜体支撑杆的另一端焊接有套接环板,所述套接环板的顶面插接有连接杆,所述连接杆的底面焊接有三角限位板,所述三角限位板的底面焊接有固定支撑杆,所述固定支撑杆的底面设有万向轮安装底板,所述万向轮安装底板的底面设有移动万向轮,所述套接环板的一侧固定连接有伸展板,所述伸展板的底面固定连接有固定支撑板,所述固定支撑板的内侧设有放置条。
作为本发明的一种优选实施方式:所述履带支撑架A的一端固定连接有移动履带A,履带支撑架B的一端固定连接有移动履带B,移动履带A与移动履带B之间平行设置。
作为本发明的一种优选实施方式:所述移动万向轮设置有若干个,且移动万向轮均匀布置在万向轮安装底板的底面,且万向轮安装底板的宽度小于支撑衔接块的最大展开距离。
作为本发明的一种优选实施方式:所述支撑衔接块的顶面固定连接有锁紧控制架,锁紧控制架的中间位置设有锁紧环,锁紧控制架中间的锁紧环与固定支撑杆的外壁套接,锁紧环的外壁设有锁紧螺丝。
作为本发明的一种优选实施方式:所述复合移动机构A和复合移动机构B相对设置,且复合移动机构A和复合移动机构B的结构相同,复合移动机构A和复合移动机构B之间设有套接管和伸缩管,两组伸缩管相互套接。
作为本发明的一种优选实施方式:所述放置条设置有两条,且放置条通过铰链与固定支撑板铰接,两条放置条的展开角度为0-180°,且两条放置条平行设置时,两条放置条之间的距离大于三角限位板的任何一边的距离。
作为本发明的一种优选实施方式:所述三角支撑架远离支撑衔接块的一端焊接有套接管,套接管的另一端套接有伸缩管,套接管和伸缩管分别位于三角支撑架的两侧。
作为本发明的一种优选实施方式:所述固定支撑杆的底面与三角限位板顶面之间的距离小于套接环板的顶面与移动履带A底面的距离,固定支撑杆的底面与三角限位板顶面的距离与连接杆距离之和大于套接环板的顶面与移动履带A底面的距离。
与现有技术相比,本发明的有益效果是:
本发明复合式移动机器人,能够改变传统机器人单一的移动方式,将多种不同的方式结合在一起,进行有序的调节与搭配,能够实现各种方式的移动,可以改变传统的机器人在移动时整体移动方式比较简单的情况,能够通过履带的方式进行移动,也能通过轮子的方式进行移动,两种移动方式相结合,然后进行相互改变,这样的移动效果能够适用于各种不同的环境,在一些极其复杂的环境中,机器人能够满足使用需求,不至于导致机器人倾倒而造成损坏的情况,同时在一些比较干净的地面上能够改变传统的履带式移动而转化为人质的移动,这样能够减少地面的损坏,同时能够满足各种不同的使用需求。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
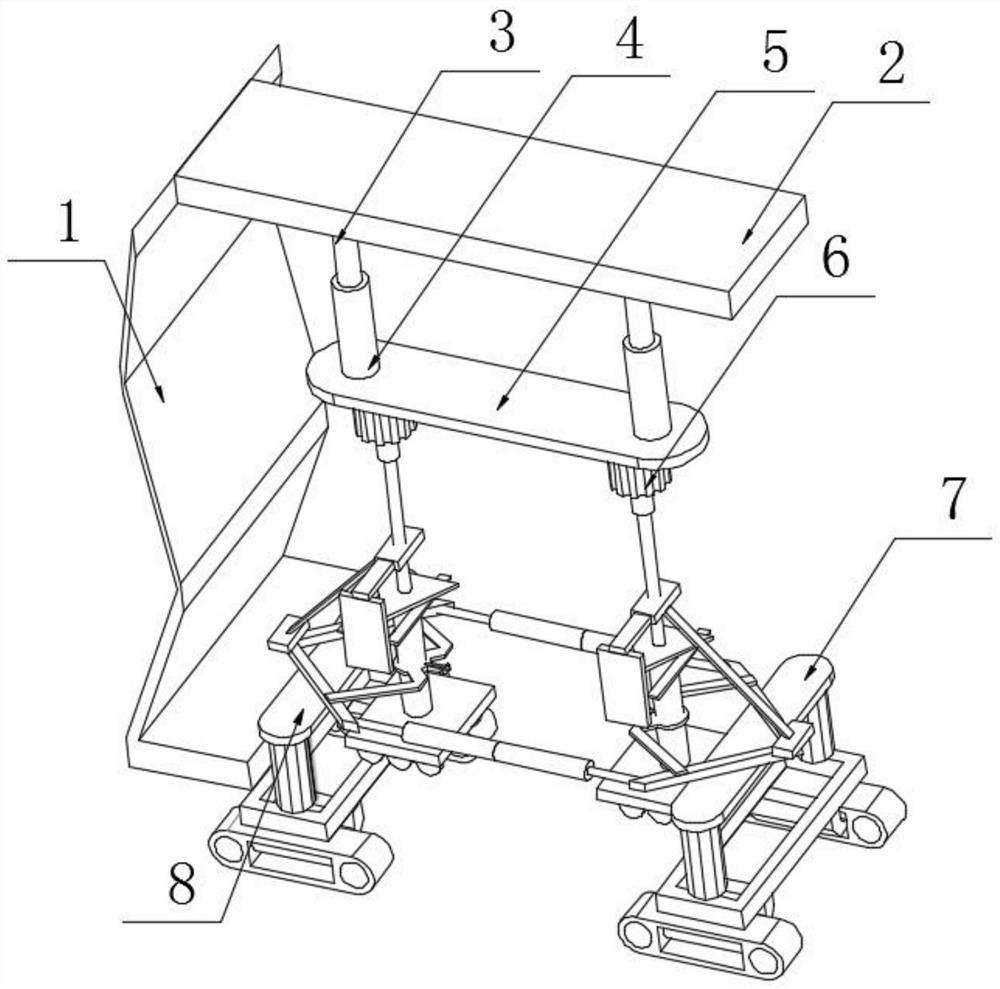
图1为复合式移动机器人的整体的立体的结构示意图;
图2为复合式移动机器人中的整体的等轴侧视的立体的结构示意图;
图3为复合式移动机器人中的复合移动机构的立体的结构示意图;
图4为复合式移动机器人中的复合移动机构的等轴侧视的立体的结构示意图。
图中:1、挡风板;2、顶面连接板;3、固定液压缸;4、液压支杆;5、电机安装板;6、驱动电机;7、复合移动机构A;8、复合移动机构B;9、连接杆;10、套接环板;11、伸展板;12、固定支撑板;13、支撑衔接块;14、斜体支撑杆;15、三角支撑架;16、支撑架托板;17、托板支撑柱;18、支撑柱底框;19、移动履带A;20、履带支撑架A;21、万向轮安装底板;22、移动万向轮;23、固定支撑杆;24、套接管;25、伸缩管;26、锁紧控制架;27、放置条;28、三角限位板;29、移动履带B;30、履带支撑架B。
具体实施方式
请参阅图1-4,本发明实施例中,复合式移动机器人,包括顶面连接板2和支撑柱底框18,顶面连接板2的底面固定连接有固定液压缸3,然后在固定液压缸3和液压支杆4的作用下,进行伸展,能够使得移动万向轮22接触地面,然后将移动履带A19和移动履带B29撑起,顶面连接板2的前侧面焊接有挡风板1,挡风板1的另一端焊接有托板支撑柱17,挡风板1主要是起到挡风的效果,固定液压缸3的底面固定连接有液压支杆4,液压支杆4的底面焊接有电机安装板5,电机安装板5便于整个电机的安装,电机安装板5的底面固定安装有驱动电机6,驱动电机6能够对复合移动机构A7和复合移动机构B8进行有效的驱动,驱动电机6的输出轴套接有连接杆9,驱动电机6的底部设有复合移动机构A7和复合移动机构B8,支撑柱底框18的顶面固定连接有托板支撑柱17,支撑柱底框18主要是起到整体支撑的效果,托板支撑柱17的顶面固定连接有支撑架托板16,支撑架托板16能够起到连接的作用,托板支撑柱17的底面固定连接有履带支撑架A20和履带支撑架B30,履带支撑架A20和履带支撑架B30能更便于移动履带A19和移动履带B29的支撑与连接,支撑架托板16的顶面固定连接有三角支撑架15,三角支撑架15的顶面焊接有支撑衔接块13,支撑衔接块13的顶面焊接有斜体支撑杆14,斜体支撑杆14件斜体支撑,保证套接环板10的稳定安装,斜体支撑杆14的另一端焊接有套接环板10,套接环板10的顶面插接有连接杆9,连接杆9的底面焊接有三角限位板28,三角限位板28的底面焊接有固定支撑杆23,三角限位板28能够在移动履带A19和移动履带B29使用时,直接的将移动万向轮22收起,固定支撑杆23的底面设有万向轮安装底板21,万向轮安装底板21的底面设有移动万向轮22,套接环板10的一侧固定连接有伸展板11,伸展板11的底面固定连接有固定支撑板12,固定支撑板12的内侧设有放置条27,放置条27用于放置三角限位板28,回收起移动万向轮22。
请参阅图1和图4,履带支撑架A20的一端固定连接有移动履带A19,履带支撑架B30的一端固定连接有移动履带B29,移动履带A19与移动履带B29之间平行设置。通过移动履带A19和移动履带B29进行履带移动,这样的移动方式能够适用于各种不同的环境,能够在山地上进行快速机动,这样的移动方式,整体适用性比较强,移动万向轮22设置有若干个,且移动万向轮22均匀布置在万向轮安装底板21的底面,且万向轮安装底板21的宽度小于支撑衔接块13的最大展开距离。转换到平整的地面时,能够通过移动万向轮22进行移动,改变移动履带A19和移动履带B29移动慢的特点,进行整个的滚动移动,减小摩擦,支撑衔接块13的顶面固定连接有锁紧控制架26,锁紧控制架26的中间位置设有锁紧环,锁紧控制架26中间的锁紧环与固定支撑杆23的外壁套接,锁紧环的外壁设有锁紧螺丝。复合移动机构A7和复合移动机构B8相对设置,且复合移动机构A7和复合移动机构B8的结构相同,能够改变传统机器人单一的移动方式,将多种不同的方式结合在一起,进行有序的调节与搭配,能够实现各种方式的移动,可以改变传统的机器人在移动时整体移动方式比较简单的情况,能够通过履带的方式进行移动,复合移动机构A7和复合移动机构B8之间设有套接管24和伸缩管25,两组伸缩管25相互套接。放置条27设置有两条,且放置条27通过铰链与固定支撑板12铰接,两条放置条27的展开角度为0-180°,且两条放置条27平行设置时,能够通过松开放置条27,然后在固定液压缸3和液压支杆4的作用下,进行伸展,能够使得移动万向轮22接触地面,然后将移动履带A19和移动履带B29撑起,两种移动方式相结合,然后进行相互改变,两条放置条27之间的距离大于三角限位板28的任何一边的距离。三角支撑架15远离支撑衔接块13的一端焊接有套接管24,套接管24的另一端套接有伸缩管25,套接管24和伸缩管25分别位于三角支撑架15的两侧。固定支撑杆23的底面与三角限位板28顶面之间的距离小于套接环板10的顶面与移动履带A19底面的距离,固定支撑杆23的底面与三角限位板28顶面的距离与连接杆9距离之和大于套接环板10的顶面与移动履带A19底面的距离,能够更加方便将履带进行移动的方式和轮子进行移动的方式相结合,然后进行相互改变,这样的移动效果能够适用于各种不同的环境。
需要说明的是,本发明为复合式移动机器人,包括1、挡风板;2、顶面连接板;3、固定液压缸;4、液压支杆;5、电机安装板;6、驱动电机;7、复合移动机构A;8、复合移动机构B;9、连接杆;10、套接环板;11、伸展板;12、固定支撑板;13、支撑衔接块;14、斜体支撑杆;15、三角支撑架;16、支撑架托板;17、托板支撑柱;18、支撑柱底框;19、移动履带A;20、履带支撑架A;21、万向轮安装底板;22、移动万向轮;23、固定支撑杆;24、套接管;25、伸缩管;26、锁紧控制架;27、放置条;28、三角限位板;29、移动履带B;30、履带支撑架B,部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
本发明的工作原理是:在进行使用时,能够直接的通过移动履带A19和移动履带B29进行履带移动,这样的移动方式能够适用于各种不同的环境,能够在山地上进行快速机动,这样的移动方式,整体适用性比较强,但是转换到平整的地面时,能够通过移动万向轮22进行移动,改变移动履带A19和移动履带B29移动慢的特点,进行整个的滚动移动,减小摩擦,能够改变传统机器人单一的移动方式,将多种不同的方式结合在一起,进行有序的调节与搭配,能够实现各种方式的移动,可以改变传统的机器人在移动时整体移动方式比较简单的情况,能够通过履带的方式进行移动,也能通过轮子的方式进行移动,这样能够减少地面的损坏,同时能够满足各种不同的使用需求,在进行移动万向轮22的移动时,能够通过松开放置条27,然后在固定液压缸3和液压支杆4的作用下,进行伸展,能够使得移动万向轮22接触地面,然后将移动履带A19和移动履带B29撑起,两种移动方式相结合,然后进行相互改变,这样的移动效果能够适用于各种不同的环境,在一些极其复杂的环境中,机器人能够满足使用需求,不至于导致机器人倾倒而造成损坏的情况,同时在一些比较干净的地面上能够改变传统的履带式移动而转化为人质的移动。
以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 复合式移动机器人
- 一种车-蛇复合式变结构移动机器人