转向控制方法和转向控制系统
文献发布时间:2023-06-19 10:55:46
技术领域
本申请涉及车辆的转向控制,更具体地涉及基于电机绝对位置的转向控制方法和转向控制系统。
背景技术
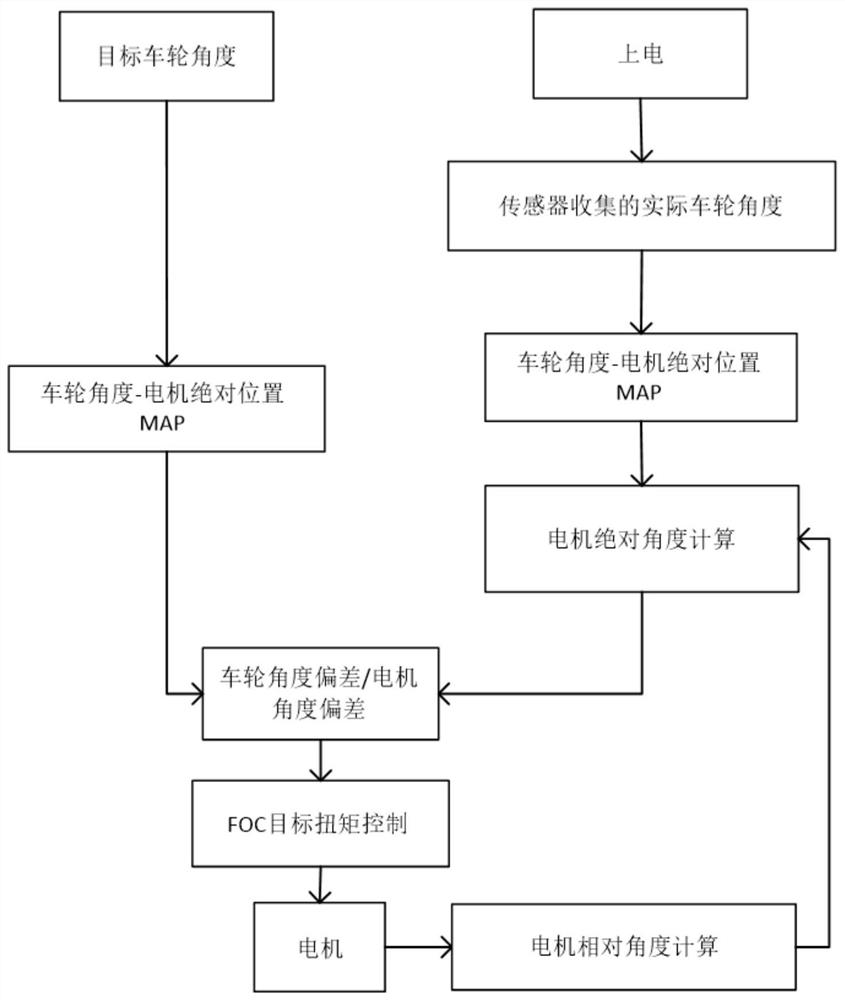
如图1所示,一般而言,例如线控转向系统的车辆转向控制系统通过车轮角度传感器收集实际车轮角度。然后,通过目标车轮角度与实际车轮角度之间的角度偏差对车轮转向电机(或称,转向控制电机,电机)进行闭环控制,以实现转向。例如,可以通过FOC(Field-Oriented Control,即磁场定向控制)目标扭矩控制来将目标电流给到车轮转向电机。
但是,上述转向控制系统在实际使用中可能会遇到以下问题。
(i)当车轮角度传感器收集的车轮角度的分辨率不足时,例如,一些车轮角度传感器能感测到的车轮角度精度为1度,车轮可能会在接近1°(度)的转向偏差角处振荡,从而影响驾驶感觉。
(ii)在车辆行驶过程中,如果车轮角度传感器发生故障,将导致车轮失去控制,从而造成危险。
发明内容
鉴于上述现有技术的状态而做出本申请。本申请的目的在于提供一种基于电机绝对位置的转向控制方法和转向控制系统。
提供一种基于电机绝对位置的转向控制方法,其包括:
标定车轮角度和车轮转向电机绝对位置之间的车轮角度-电机绝对位置映射关系;
获取目标车轮角度,基于该目标车轮角度从所述车轮角度-电机绝对位置映射关系获取目标电机查表角度θ
控制所述车轮转向电机转动到所述目标电机查表角度θ
在至少一个实施方式中,所述转向控制方法还包括:
在车辆转向控制系统上电时获取初始车轮角度,基于该初始车轮角度从所述车轮角度-电机绝对位置映射关系获取初始电机查表角度θ
其中,控制所述车轮转向电机转动到所述目标电机查表角度θ
在至少一个实施方式中,控制所述车轮转向电机包括控制所述车轮转向电机的转动圈数和角度位置,
在车辆转向控制系统上电时通过电机角度传感器来获取所述车轮转向电机的初始角度θ
所述电机绝对位置的至少部分值大于360度。
在至少一个实施方式中,所述转向控制方法还包括:
记录所述车轮转向电机的所述目标电机查表角度θ
在至少一个实施方式中,标定所述车轮角度-电机绝对位置映射关系包括:
使所述车轮以预定的角度梯度转动到所述车轮的转向范围内的多个位置,记录所述车轮转动到每个位置时的电机绝对角度θ
在至少一个实施方式中,在所述车轮角度-电机绝对位置映射关系中,车轮角度和所述电机绝对角度θ
在至少一个实施方式中,在车辆转向控制系统上电时获取所述初始车轮角度一次,直到所述车辆转向控制系统断电。
在至少一个实施方式中,由自动驾驶控制器给出所述目标车轮角度。
提供一种基于电机绝对位置的转向控制系统,其包括:
存储器,其存储着车轮角度和车轮转向电机绝对位置之间的车轮角度-电机绝对位置映射关系;
电机角度传感器,其用于获取车轮转向电机的电机角度;
车轮角度传感器,其用于获取初始车轮角度;
转向控制器,其用于
--基于该初始车轮角度从所述车轮角度-电机绝对位置映射关系获取初始电机查表角度θ
--获取目标车轮角度,基于该目标车轮角度从所述车轮角度-电机绝对位置映射关系获取目标电机查表角度θ
--使所述车轮转向电机转动偏差角度θ
在至少一个实施方式中,所述转向控制系统为自动驾驶车辆的线控转向系统,
所述转向控制器从自动驾驶控制器获得所述目标车轮角度。
在本申请的基于电机绝对位置的转向控制方法和转向控制系统中,可以将车轮角度转换为电机角度,通过对车轮转向电机的控制实现车轮的转向,因为使用电机转向角度对电机转向进行控制的控制精度远大于使用车轮转向角度对电机转向进行控制的控制精度,在本申请中,车轮转向电机的控制更加精确、稳定,可以减少或消除车轮振荡,改善驾驶体验。
附图说明
图1示出了一种转向控制方法的原理框图。
图2示出了根据本申请的一个实施例的转向控制方法的原理框图。
图3示出了根据本申请的一个实施例的转向控制系统的原理框图。
具体实施方式
下面参照附图描述本申请的示例性实施方式。应当理解,这些具体的说明仅用于示教本领域技术人员如何实施本申请,而不用于穷举本申请的所有可行的方式,也不用于限制本申请的范围。
参照图2和图3,本申请提供一种基于电机绝对位置的转向控制方法,其包括:
标定车轮角度和车轮转向电机绝对位置之间的车轮角度-电机绝对位置映射关系(下面,有时将该映射关系称为MAP);
获取目标车轮角度,基于该目标车轮角度从车轮角度-电机绝对位置MAP获取目标电机查表角度θ
控制车轮转向电机转动到目标电机查表角度θ
其中,可以在车辆转向控制系统上电时获取初始车轮角度,基于该初始车轮角度从车轮角度-电机绝对位置映射关系获取初始电机查表角度θ
控制车轮转向电机转动到目标电机查表角度θ
其中,控制车轮转向电机包括控制车轮转向电机的转动圈数和角度位置,这里的角度位置在0到360度的范围。换言之,控制车轮转向电机包括控制车轮转向电机转动小于或等于360度的角度及控制车轮转向电机转动大于360度的角度。
可以在车辆转向控制系统上电时通过电机角度传感器来获取车轮转向电机的初始角度θ
电机绝对位置(或称电机绝对角度)的至少部分值大于360度。
其中,所述转向控制方法可以还包括:记录车轮转向电机的目标电机查表角度θ
其中,标定车轮角度-电机绝对位置MAP可以包括:
使车轮以预定的角度梯度转动到车轮的转向范围内的多个位置,记录车轮转动到每个位置时的表示电机绝对位置的电机绝对角度θ
例如,在车轮的转向范围为-30度至30度时,在以2度为上述预定的角度梯度时,车轮分别转动经过-30度、-28度、-26度......0度……26度、28度、30度。当然,本申请中的车轮转动范围不限于该举例。
所标定的车轮角度-电机绝对位置MAP可以记录于车辆的存储器,供以后查表调用。
在车轮角度-电机绝对位置MAP中,车轮角度和电机绝对角度θ
在例如车轮从-30度转动到30度时,车轮转向电机可能转过了几十圈,车轮转向电机转过的角度可能是几千度甚至上万度或几万度。
可以通过车轮角度传感器来获得车轮角度,通过电机角度传感器来获得电机绝对角度θ
这里,通过电机角度传感器来获得电机绝对角度θ
上述预定的角度梯度可以为例如1度或2度或3度或4度或5度等角度,角度梯度越小,标定的车轮角度-电机绝对位置MAP精度越高。优选地,该预定的角度梯度可以为车轮角度传感器的测量精度(例如1度)。
可以理解,可以采用插值的方法获得非直接测量的车轮角度和电机绝对角度θ
在上述获取车轮转向电机的初始角度(相对角度或相对位置)θ
在上述获取初始车轮角度中,可以在车辆转向控制系统上电(或称“通电”)时,从车轮角度传感器获取初始车轮角度一次,直到车辆转向控制系统断电。
可以由转向控制器基于该车轮角度从存储器中存储的车轮角度-电机绝对位置MAP获取初始电机查表角度θ
在上述获取目标车轮角度中,可以由自动驾驶控制器给出目标车轮角度。因而,上述转向控制器可以包括自动驾驶控制器。当然,可以理解,本申请中的转向控制方法和转向控制系统可以用于、但不限于用于自动驾驶车辆。可以理解,上述转向控制器还可以是自动驾驶控制器,或者上述转向控制器和自动驾驶控制器可以是两个分开的控制器。
可以由转向控制器基于该目标车轮角度从车轮角度-电机绝对位置MAP获取目标电机查表角度θ
本申请还提供一种基于电机绝对位置的转向控制方法,其包括:
在车辆转向控制系统上电时,
--从电机角度传感器获取车轮转向电机的当前位置的初始角度θ
--从车轮角度传感器获取初始车轮角度,基于该车轮角度从车轮角度-电机绝对位置MAP获取初始电机查表角度θ
获取目标车轮角度,基于该目标车轮角度从车轮角度-电机绝对位置MAP获取目标电机查表角度θ
使车轮转向电机从初始角度θ
本申请还提供一种基于电机绝对位置的转向控制方法,其包括:
在车辆转向控制系统上电时,
--从电机角度传感器获取车轮转向电机的当前位置的初始角度θ
--从车轮角度传感器获取初始车轮角度,基于该车轮角度从车轮角度-电机绝对位置MAP获取初始电机查表角度θ
在车轮转向电机转动到不同于θ
θ
通过使车轮转向电机转动到对应于目标车轮角度的电机绝对位置而使车轮转动到目标车轮角度。
下面,结合图2描述本申请的基于电机绝对位置的转向控制方法的一个实施例。在本申请的转向控制方法中,通过在上电(接通电源)时校正车轮转向电机的位置,该方法可以将车轮角度转换成表示车轮转向电机的绝对位置的电机绝对角度,从而实现对车轮转向电机的精确、稳定控制。
在上电后标定车轮角度与车轮转向电机的电机绝对角度(或称“电机绝对位置”)之间的对应关系,即标定上述车轮角度-电机绝对位置MAP。可以将车轮转动到0度,然后以5度的梯度使车轮转动,记录车轮转向电机在每个位置的角度,获得上述车轮角度-电机绝对位置MAP。
可以理解,可以仅在车辆出厂之前一次性地形成上述车轮角度-电机绝对位置MAP。在车辆交付消费者之后的正常行驶时,无需再标定或形成上述车轮角度-电机绝对位置MAP。
当然,出于车辆维护或校准、系统升级等目的,或者在车辆的转向控制系统的软、硬件发生变化之后,可以再次标定或形成上述车轮角度-电机绝对位置MAP。
在车辆的正常使用中,每次车辆(特别是车辆转向控制系统)上电时,都由电机角度传感器读取车轮转向电机当前位置的初始角度(相对位置角度)θ
θ
根据该公式,可以计算出当前行驶周期中的电机绝对角度,可以用电机绝对角度控制车轮转向,直到车辆(特别是车辆转向控制系统)断电时。在下次车辆上电时,再次校正电机绝对位置θ
在本实施例中,根据目标车轮角度和绝对电机角度控制车轮转向电机,从而控制车轮转向。这里,车轮可以是车辆的转向轮或驱动轮。可以理解,可以为每个或者每对车轮配备一套本申请中的转向控制系统。
在图2中,在获得电机角度偏差之后,即获得车轮转向电机需要转动的角度之后,可以经由FOC目标扭矩控制计算出车轮转向所需的扭矩,将目标电流施加给车轮转向电机。
这里,电机相对角度是指在车辆的正常使用中,由电机角度传感器测量的电机角度,电机绝对角度是指对应于车轮角度-电机绝对位置MAP中的表示车轮转向电机的绝对位置的电机绝对角度。
可以理解,本申请中的电机角度可以是电机转子的角度或者电机的输出轴的角度等,只要该角度可以表达电机的转子或输出轴的角度或位置即可。
参照图3,本申请还提供一种基于电机绝对位置的转向控制系统,其包括:
存储器,其存储着车轮角度和车轮转向电机绝对位置之间的车轮角度-电机绝对位置MAP,可以由后述的转向控制器调用该车轮角度-电机绝对位置MAP;
电机角度传感器,其用于获取车轮转向电机的电机角度,电机角度特别地可以包括电机的初始角度θ
车轮角度传感器,其用于获取初始车轮角度,车轮角度传感器可以将检测到的初始车轮角度发送给后述的转向控制器,或者由后述的转向控制器从车轮角度传感器读取该车轮角度;
转向控制器,其用于
--基于该初始车轮角度从车轮角度-电机绝对位置MAP获取初始电机查表角度θ
--获取目标车轮角度,例如从自动驾驶控制器获取该目标车轮角度,基于该目标车轮角度从车轮角度-电机绝对位置MAP获取目标电机查表角度θ
--使车轮转向电机转动偏差角度θ
该转向控制系统可以为自动驾驶车辆的线控转向系统,该转向控制系统可以是EPS(电动助力转向)系统。
可以理解,该转向控制系统可以使用上述转向控制方法。
在本申请中,根据车轮转向电机的高位置(角度)精度,将车轮角度转换为用于转向控制的电机角度,有效地提高了转向控制的精度和稳定性。
与传统的基于车轮角度传感器的EPS转向控制相比,本申请的转向控制方法和系统可以提高车轮的控制精度,避免车轮转向过程中的振荡。
由于本申请的转向控制方法和系统可以仅在上电时使用车轮角度(车轮角度传感器)一次,在后续转向过程中不依赖于车轮角度(车轮角度传感器),而是使用电机角度,因此可以避免由于行驶中车轮角度传感器的故障而导致的车辆失控。
应当理解,上述实施方式仅是示例性的,不用于限制本申请。本领域技术人员可以在本申请的教导下对上述实施方式做出各种变型和改变,而不脱离本申请的范围。
- 转向控制装置、转向控制系统、转向控制方法及转向控制程序
- 转向控制系统、转向控制装置及转向控制方法