一体化激光雷达系统及其检测方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及一种雷达系统,特别是涉及一体化激光雷达系统。
背景技术
随着科技发展,人工智能逐渐普及,而无人驾驶等人工智能技术的发展需要配合雷达实现对路上障碍物的识别。但现有雷达只具有测量物体与雷达之间空间距离的功能,无法识别物体的具体类型,导致雷达的应用受限。
发明内容
本发明提供了一体化激光雷达系统及其检测方法,以至少解决现有技术中对物体的精确识别及距离测定。
本发明提供了一体化激光雷达系统包括检测模组、分析模组,所述检测模组与分析模组相连,所述检测模组包括激光雷达单元、相机单元,所述激光雷达单元、相机单元的检测方向重合。
进一步地,所述一体化激光雷达系统还包括显示屏模组,所述显示屏模组与分析模组相连。
更进一步地,所述一体化激光雷达系统还包括壳体,所述检测模组、分析模组安装在壳体内,所述显示屏模组可采用固定方式安装在壳体上,也可采用转动的方式安装在壳体上。
进一步地,所述一体化激光雷达系统还包括矫正模组,所述矫正模组与分析模组相连,所述矫正模组包括惯性导航模块、陀螺仪中的一种或多种。
本发明还公开一种上述一体化激光雷达系统的检测方法,包括:
S1启动激光雷达单元、相机单元,根据激光雷达单元所采集信息建立世界坐标系,根据相机单元的检测方向建立相机坐标系统,根据相机单元所采集信息建立图像坐标系,并根据相机单元所采集图像建立像素坐标;
S2将世界坐标系向相机坐标系转换拟合;
S3将相机坐标系向图像坐标系转换拟合;
S4将图像坐标系向像素坐标系转换拟合;
S5获得世界坐标系、图像坐标系与像素坐标系的转换关系,实现激光雷达单元所采集信息与相机单元所采集信息的拟合。
进一步地,所述建立世界坐标系包括:
以激光雷达单元为几何中心,设定激光雷达单元的左右为XL轴,设定激光雷达单元的上下为YL轴,设定激光雷达单元的检测深度为ZL轴。
更进一步地,所述建立相机坐标系统包括:
以相机单元的光心为原点,设定水平轴为XC轴,垂直轴为YC轴,相机单元光轴所在直线为ZC轴。
更进一步地,所述S2将世界坐标系向相机坐标系转换拟合包括:
设定3x3旋转矩阵为R、3x1平移矩阵为T,建立世界坐标系向相机坐标系的转换公式如下:
更进一步地,所述S3将相机坐标系向图像坐标系转换拟合包括:
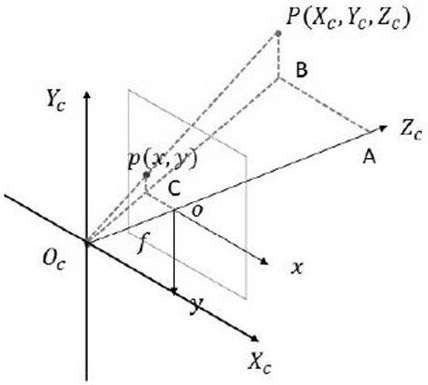
设定相机焦距为f,在相机坐标系下设定实际点p,设定实际点p在图像坐标系中的投影点为p(x,y),建立p与p(x,y)的坐标关
根据p与p(x,y)的坐标关系建立相机坐标系向图像坐标系转换公式如下:
更进一步地,所述建立像素坐标包括:
设定像素坐标系为U轴,V轴,以图像左上角起始点为原点,U轴为水平向右,V轴竖直向下;
所述S4将图像坐标系向像素坐标系转换拟合包括:
设定像素坐标系原点为o1,图像坐标系原点为o,o在像素坐标系下o1的坐标为(Uo,Vo),单个像素在像素坐标系中的长和宽分别为dx、dy,获得变换公式为:
获得激光雷达单元所采集信息与相机单元所采集信息的拟合公式为f(XL,YL,ZL)= U, V。
更进一步地,所述检测方法还包括图像识别:
根据激光雷达单元所采集信息与相机单元所采集信息的拟合公式,将图像中的像素RGB颜色赋值到世界坐标系XL,YL,ZL上,形成立体像素点;
将多个立体像素点组成立体像素点云,通过k-tree算法,筛选出相应点云模型,以确定立体像素点云对应的物体及物体实际距离。
本发明还公开一种上述一体化激光雷达系统的检测方法,所述检测方法包括:
S1启动激光雷达单元、相机单元,根据激光雷达单元所采集信息建立世界坐标系,根据相机单元的检测方向采集样本信息,并要聚类的样本中选取K个样本,得到数据集D ={P1, P2, …, Pn};
S2从数据集D中随机选择k个数据点作为质心,质心集合定义为:Centroid ={Cp1, Cp2, …, Cpk},排除质心以后数据集O={O1, O2, …, Om};
S3对集合O中每一个数据点Oi,计算Oi与Cpj(j=1, 2, …,k)的距离,得到一组距离Si={si1, si2, …, sik},计算Si中距离最小值,则该该数据点Oi就属于该最小距离值对应的质心;
S4根据S3中每个数据点Oi都已经属于其中一个质心,然后根据每个质心所包含的数据点的集合,重新计算得到一个新的质心,其中新计算的质心和原来的质心之间的距离达到T时,筛选出来相应点云。通过K-means算法;筛选出相应点云模型。
本发明还公开一种上述一体化激光雷达系统的检测方法,所述检测方法包括:
S1启动激光雷达单元、相机单元,根据激光雷达单元所采集信息,并将采集信息点云相机视角划分为 左右X,上下Y,前后Z,其中任意角度点云应该旋转贴合该点云三轴;
S2将空间按照1cm的尺寸进行厚度,宽度,高度划分切片;
S3将pointcloud点云放置于空间切换中,点云被划分成 N * N * N 片;
S4抽取N * N *N中点云最密集切块,进行定位切割,并提取出点云密度角度物体,实现物体识别。
本发明相对于现有技术,通过采用激光雷达单元、相机单元,建立一体化激光雷达系统,实现对物品距离测定及物体识别。
本发明相对于现有技术,通过采用激光雷达单元、相机单元,建立一体化激光雷达系统,有效的解决现有激光雷达工作时需要配合一台单独的电脑来进行数据处理,导致其使用范围有效,而且移动极为不方便的问题,本发明高度集成可以在一个铝壳中,无论在什么样的场景均能适合使用(可以进行测量长度,测量距离,测量速度,测量加速度等作业),而且使用极为方便。
本发明相对于现有技术,通过设置可转动的显示屏模组来方便于使用者使用时根据情况进行调节显示屏模组的角度,使其处于一个最佳的使用环境;再者通过设置无效通讯来于外接设备进行交互,进一步提高整个一体化激光雷达系统的实用性。
综上所述本发明相对于现有技术,将传统的具有单一功能的激光雷达全部集成到一体化激光雷达系统,使其具有最小的体积,可进行多种任务使用,又不用携带额外的电脑,使得整个具有体积小、功能全、精度高、方便携带等优点,具有较好的实用前景。
附图说明
图1为本发明实施例p在图像坐标系中的投影点为p(x,y)图;
图2为本发明实施例像素坐标系示意图;
图3为本发明实施例测试物体高度示例示意图;
图4为本发明实施例场景进行测绘/侦测物体速度/加速度示意图;
图5为本发明实施例一体化激光雷达系统示意图。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。
本发明实施例公开一体化激光雷达系统如图5所示,包括检测模组、分析模组,所述检测模组与分析模组相连,所述检测模组包括激光雷达单元、相机单元,所述激光雷达单元、相机单元的检测方向重合。
可选的,所述一体化激光雷达系统还包括显示屏模组,所述显示屏模组与分析模组相连。
特别的,所述一体化激光雷达系统还包括壳体,所述检测模组、分析模组安装在壳体内,所述显示屏模组可采用固定方式安装在壳体上,也可采用转动的方式安装在壳体上。
可选的,所述一体化激光雷达系统还包括矫正模组,所述矫正模组与分析模组相连,所述矫正模组包括惯性导航模块、陀螺仪中的一种或多种。
其中,本发明实施例中可采用惯性导航模块、陀螺仪,通过惯性导航模块、陀螺仪对一体化激光雷达系统的安装角度及运动状态进行分析,从而确定一体化激光雷达系统的机身姿态。
本发明实施例还公开一种上述一体化激光雷达系统的检测方法,包括:
S1启动激光雷达单元、相机单元,根据激光雷达单元所采集信息建立世界坐标系,根据相机单元的检测方向建立相机坐标系统,根据相机单元所采集信息建立图像坐标系,并根据相机单元所采集图像建立像素坐标;
S2将世界坐标系向相机坐标系转换拟合;
S3将相机坐标系向图像坐标系转换拟合;
S4将图像坐标系向像素坐标系转换拟合,具体为图像的像素化;
S5获得世界坐标系、图像坐标系与像素坐标系的转换关系,实现激光雷达单元所采集信息与相机单元所采集信息的拟合。
可选的,所述建立世界坐标系包括:
以激光雷达单元为几何中心,设定激光雷达单元的左右为XL轴,设定激光雷达单元的上下为YL轴,设定激光雷达单元的检测深度为ZL轴。
特别的,所述建立相机坐标系统包括:
以相机单元的光心为原点,设定水平轴为XC轴,垂直轴为YC轴,相机单元光轴所在直线为ZC轴。
特别的,所述S2将世界坐标系向相机坐标系转换拟合包括:
设定3x3旋转矩阵为R、3x1平移矩阵为T,建立世界坐标系向相机坐标系的转换公式如下:
特别的,所述S3将相机坐标系向图像坐标系转换拟合包括:
设定相机焦距为f,在相机坐标系下设定实际点p,如图1所示,设定实际点p在图像坐标系中的投影点为p(x,y),建立p与p(x,y)的坐标关
根据p与p(x,y)的坐标关系建立相机坐标系向图像坐标系转换公式如下:
特别的,所述建立像素坐标包括:
如图2所示,设定像素坐标系为U轴,V轴,以图像左上角起始点为原点,U轴为水平向右,V轴竖直向下;
所述S4将图像坐标系向像素坐标系转换拟合包括:
设定像素坐标系原点为o1,图像坐标系原点为o,o在像素坐标系下o1的坐标为(Uo,Vo),单个像素在像素坐标系中的长和宽分别为dx、dy,获得变换公式为:
获得激光雷达单元所采集信息与相机单元所采集信息的拟合公式为f(XL,YL,ZL)= U, V。
特别的,所述检测方法还包括图像识别:
根据激光雷达单元所采集信息与相机单元所采集信息的拟合公式,将图像中的像素RGB颜色赋值到世界坐标系XL,YL,ZL上,形成立体像素点;
将多个立体像素点组成立体像素点云,通过k-tree算法,筛选出相应点云模型,以确定立体像素点云对应的物体及物体实际距离。
本发明还公开一种上述一体化激光雷达系统的检测方法,所述检测方法包括:
S1启动激光雷达单元、相机单元,根据激光雷达单元所采集信息建立世界坐标系,根据相机单元的检测方向采集样本信息,并要聚类的样本中选取K个样本,得到数据集D ={P1, P2, …, Pn};
S2从数据集D中随机选择k个数据点作为质心,质心集合定义为:Centroid ={Cp1, Cp2, …, Cpk},排除质心以后数据集O={O1, O2, …, Om};
S3对集合O中每一个数据点Oi,计算Oi与Cpj(j=1, 2, …,k)的距离,得到一组距离Si={si1, si2, …, sik},计算Si中距离最小值,则该该数据点Oi就属于该最小距离值对应的质心;
S4根据S3中每个数据点Oi都已经属于其中一个质心,然后根据每个质心所包含的数据点的集合,重新计算得到一个新的质心,其中新计算的质心和原来的质心之间的距离达到T时,筛选出来相应点云。通过K-means算法;筛选出相应点云模型。
具体的,本实施例中采用了K-Means算法是一种常用的聚类算法,因其思想简单、容易实现而收到广泛的运用。从聚类的样本中选取K个样本,然后遍历所有样本,对每个样本计算其与K个样本间的距离(可以为欧氏距离或余弦距离),然后将其类别归为距离最小的样本所属类别,这样的话,所有样本就都找到各自所属的类别;然后分别重新计算K个类别中样本的质心;之后返回第一步继续迭代执行,如此直到K个类别中样本的质心不再移动或移动的非常小。整个过程往往要不了几次就达到收敛。
本发明还公开一种上述一体化激光雷达系统的检测方法,所述检测方法包括:
S1启动激光雷达单元、相机单元,根据激光雷达单元所采集信息,并将采集信息点云相机视角划分为 左右X,上下Y,前后Z,其中任意角度点云应该旋转贴合该点云三轴;
S2将空间按照1cm的尺寸进行厚度,宽度,高度划分切片;
S3将pointcloud点云放置于空间切换中,点云被划分成 N * N * N 片;
S4抽取N * N *N中点云最密集切块,进行定位切割,并提取出点云密度角度物体,实现物体识别。
本发明实施例通过采用激光雷达单元、相机单元,建立一体化激光雷达系统,实现对物品距离测定及物体识别。
最后应当说明的是,以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解,技术人员阅读本申请说明书后依然可以对本发明的具体实施方式进行修改或者等同替换,但这些修改或变更均未脱离本发明申请待批权利要求保护范围之内。
- 一体化激光雷达系统及其检测方法
- 用于激光雷达的光罩脏污检测系统、检测方法及激光雷达