在负载改变时运行至少两个驱动电机的方法和驱动控制器以及具有驱动控制器的机动车
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及一种用于在车辆负载改变时运行至少两个驱动电机的方法以及一种用于运行至少两个驱动电机的驱动控制器。根据本发明还提供一种具有驱动控制器的机动车。
背景技术
在具有电机和独立驱动的车桥或车轮(即每个被驱动的车桥对应一个驱动电机)的车辆中,在两个驱动电机上通常沿相同方向设定推进力矩或回收力矩。也就是说,在加速时两个驱动电机都提供正力矩,在制动时或回收时两个驱动电机都提供负力矩。在从滑行运行/惯性运行(Schubbetrieb)向牵引运行(Zugbetrieb)过渡时,即在所谓的负载变化或负载变换时,驱动构件、总成和齿面发生接触变化。该负载变化例如在行驶期间或在启动时出现。
该过渡通常伴随着急动或明显噪声。该问题在现有技术中是已知的且必须根据构件公差利用消音措施来解决。这些措施通常非常复杂且需要很高成本。此外车辆失去了自发性。由此仅能有限地实现驱动电机的运动型设计,这导致稀少的运动型车辆设计。此外由于昂贵的消音措施,还产生了附加成本。
由文献DE 601 04 247 T2已知一种用于在驱动系统中出现在负载变化时吸收游隙/补偿间隙的方法。该驱动系统具有驱动马达,该驱动马达优选是内燃机,该驱动马达联接至车辆中的动力传动系。驱动系统还具有电机,该电机将驱动力矩或制动力矩作用在驱动马达和动力传动系上,该电机联接至驱动马达并且构成动力传动系的一部分。此外提供了一种根据是否面临负载变化来控制电机的控制系统,该控制系统确定是否需要来自电机的驱动力矩或制动力矩,在发生负载变化时,该控制系统向电机发送单个脉冲,其中在开始驱动马达的力矩级之前,电机的力矩脉冲吸收动力传动系的游隙。
由文献DE 10 2010 053 538 A1已知一种机动车中的动力传动系,该机动车具有内燃机,该内燃机具有能够与变速器的至少一个变速器输入轴连接的曲轴。为了衰减动力传动系振动,在内燃机与变速器的传动轴之间在旋转的构件上设有可切换的涡流制动器。
发明内容
本发明的目的是降低在负载变化时出现的不利影响。
该目的通过独立权利要求的主题实现。本发明有利的改进方案通过从属权利要求、下面的说明以及附图公开。
通过本发明提供了一种用于在车辆的负载变换时运行至少两个驱动电机的方法,其中通过第一驱动电机能够向第一车桥的至少一个车轮传递第一力矩,通过第二驱动电机能够向第二车桥的至少一个车轮传递第二力矩。在此每个力矩都由大小/量值和方向来定义。换句话说,该方法能够在运行车辆时使用,该车辆具有至少两个驱动电机,其中一个驱动电机可以是交流电机,其产生力矩或转矩。在此,可以在车辆的每个车桥上分别设有分别产生力矩的驱动电机,该力矩能够被传递给相应车桥的车轮,其中相应的驱动电机能够将力矩通过轴传递至相应车轮,和/或相应的驱动电机直接安装在车轮处,从而驱动电机能够直接将力矩传递至车轮。可以设置成,对于每个被驱动的车桥,相应的驱动电机彼此独立地布置。但也可以考虑,驱动电机通过动力传动系彼此连接。由每个驱动电机产生的力矩根据矢量表达具有一个量值和一个方向。
该方法包括:步骤a)确定是否即将在可预定的第一时间段内发生负载变化;步骤b)如果在步骤a)中判定为是,则在可预定的第二时间段内调节第二力矩,使该第二力矩的方向与第一力矩的瞬时方向相反。换句话说,该方法确定:是否即将在第一预定时间段内发生负载变化,如果即将发生负载变化,则可以将第二力矩调节为与第一力矩的瞬时方向相反的方向。负载变化在此可以是力矩在启动时的改变和/或驱动电机的力矩在行驶期间的改变。第一预定时间段可以例如是如下的时长,驱动电机需要该时长来在操纵加速踏板后增长力矩。可预定的第二时间段可以是如下的时长,在该时长中发生负载变化,即从滑行运行过渡到牵引运行之间的时长。
通过本发明得出的优点是,能够例如在车辆快速启动时、即在所谓的赛车起步(Race-Start)时选择车辆的更加运动的设置,这时动力传动系能够被预加载。此外能够减弱从现有技术已知的急动,这能够使得在道路交通中或在车辆调整或泊出时更加舒适。此外,可以降低驱动构件的磨损,这是因为在负载变化时驱动构件、例如齿面不再以很大的力被突然反转,而是通过该方法已经反转到所期望的方向。此外,可以减少在负载变化时明显的噪音,由此需要的消音措施较少,这降低了成本。
本发明还包括得出额外优点的实施方案。
一种实施方案提出,在执行步骤a)之前第一力矩的大小不为零,其中,在负载变化时执行负载变换,这时第二力矩改变其方向。换句话说,车辆可以处于行驶运行中,这时两个力矩首先可以都指向同一方向,通过本方法,在负载变化时第二力矩可以改变其方向。在此负载变化可以被称为行驶期间的负载变换。由此得到的优点是,在行驶期间能够实现更加运动的行驶方式,但是需要更少的隔音措施,这是因为通过本发明能够在行驶期间减少在负载变换时明显的噪音。
一种实施方式提出,在执行步骤a)之前第一力矩的大小等于零,其中,在负载变化时,第一力矩的大小不等于零。换句话说,在启动过程中实施本方法,其中,负载变化是:第一力矩的大小从零变化为不为零。也就是说,例如车辆能够通过第一力矩从静止开始启动。该实施方式具有的优点是,能够实现更加运动的行驶方式,由此能够实现快速启动或赛车起步。此外通过在启动时衰减急动,由此可以在走走停停的交通中或在车辆调整和泊车时实现更高的舒适性。
另一实施方案提出,在步骤b)中第二力矩被调节到与第一力矩的瞬时方向相反的方向上并具有规定的大小。也就是说,可以使用规定的大小,以便将第二力矩调节成与第一力矩的瞬时方向相反的方向。优选该规定的大小可以小于第一力矩的大小,从而通过各力矩的总和得到正的总力矩,因此能够实现在一个方向上的加速度。该规定的大小尤其可以是将第二力矩调节至5牛顿米至20牛顿米的值的大小。在此有利的是,调节足够高的大小,以便对驱动系预加载,由此能够吸收负载变化。
一种实施方式提出,步骤b)还包括:在第二预定时间段内同时在第一力矩的方向上使第一力矩增加第二力矩的大小。换言之,在可能发生负载变换或负载变化的第二预定时间段内,为第一力矩增加第二力矩的大小。由此得到的优点是,在第二预定时间段内,两个力矩的总和在执行该方法之前和之后仍保持不变。由此能够减少车辆中的急动。
一种实施方式提出,该方法还包括:步骤c),确定第二预定时间段是否已经结束;步骤d),如果在步骤c)中判定为是,则在接着第二预定时间段之后的第三预定时间段内同时执行:将第二力矩调节成第一力矩的方向以及使第一力矩减小第二力矩的大小。换句话说,可以在例如发生负载变化所需的第二预定时间段之后设置第三预定时间段,在该第三预定时间段中,再次将第二力矩调节回第一力矩的方向,且同时使第一力矩的大小减小第二力矩的大小,从而各力矩的总和在该第三预定时间段内仍保持不变。第三预定时间段可以例如是将第二力矩调节成第一力矩的方向所需的时间。第二力矩的调节和第一力矩的减小可以例如通过合适的预控制/先导控制、例如通过斜坡函数来产生或通过过滤器来滤波,使得产生力矩的均匀过渡。该实施方案的优点是,力矩在负载变化之后重又能够被调节成用一方向,而不会发生突然减速。此外可以通过将两个力矩调节至同一方向来节省能量,这是因为不再需要补偿负力矩。
另一实施方案提出,基于传感器测量来减小第一力矩,在传感器测量中确定第一驱动电机的功率参数和第二驱动电机的功率参数,然后如此调节第一力矩,使得两个功率参数的总和保持恒定。也就是说,如此调节第一力矩,使得两个驱动电机的功率参数的总和保持不变。功率参数在此例如可以是能够由转矩传感器测得的力矩,但也可以是能够借助于电流传感器测得的电流值,从而可以确定相应的驱动电机的功率。例如可以为这两个驱动电机提供总的电功率,其中,在第二驱动电机的电功率增加时,相应地减小第一驱动电机的功率。通过该实施方式得出的优点是,这两个驱动电机能够相互一起地或彼此相关地被调节,而不会产生总力矩的变化。由此能够减少车辆中的急动或明显的噪音。
一种实施方式提出,在第一车桥上设有至少两个车轮,在第二车桥上设有至少两个车轮,每个车轮具有各自的驱动电机,其中,在第一车桥上的车轮的力矩总和得到第一力矩,在第二车桥上的车轮的力矩总和得到第二力矩。换言之,每个车桥的每个车轮都具有各自的驱动电机,第一车桥的力矩共同形成第一力矩,第二车桥的力矩共同形成第二力矩。由此得到的优点是,该方法能够被用于在负载变化时运行车辆,其中车辆的每个车轮都具有各自的驱动电机。
本发明的另一方面涉及一种用于在负载变化时运行至少两个驱动电机的驱动控制器,其中,通过第一驱动电机能够向第一车桥的至少一个车轮传递第一力矩,通过第二驱动电机能够向第二车桥的至少一个车轮传递第二力矩,在此,每个力矩都由大小和方向来定义。驱动控制器被设置用于,确定:是否即将在可预定的第一时间段内发生负载变化,如果即将发生负载变化,则驱控第二驱动电机,使得在可预定的时间段内调节第二力矩,使得第二力矩的方向与第一力矩的瞬时方向相反。由此得到与在该方法中相同的优点和改型方案。
根据本发明还提供一种具有驱动控制器的机动车。机动车在此可以是摩托车、轿车、载重汽车或公共汽车。
本发明还包括根据本发明的驱动控制器的改进方案,其具有如已经结合根据本发明的方法的改进方案所述的特征。因此,在此不再赘述根据本发明的驱动控制器的相应的改进方案。
本发明还包括所述实施方式的特征的组合。
附图说明
下面描述本发明实施例。为此示出:
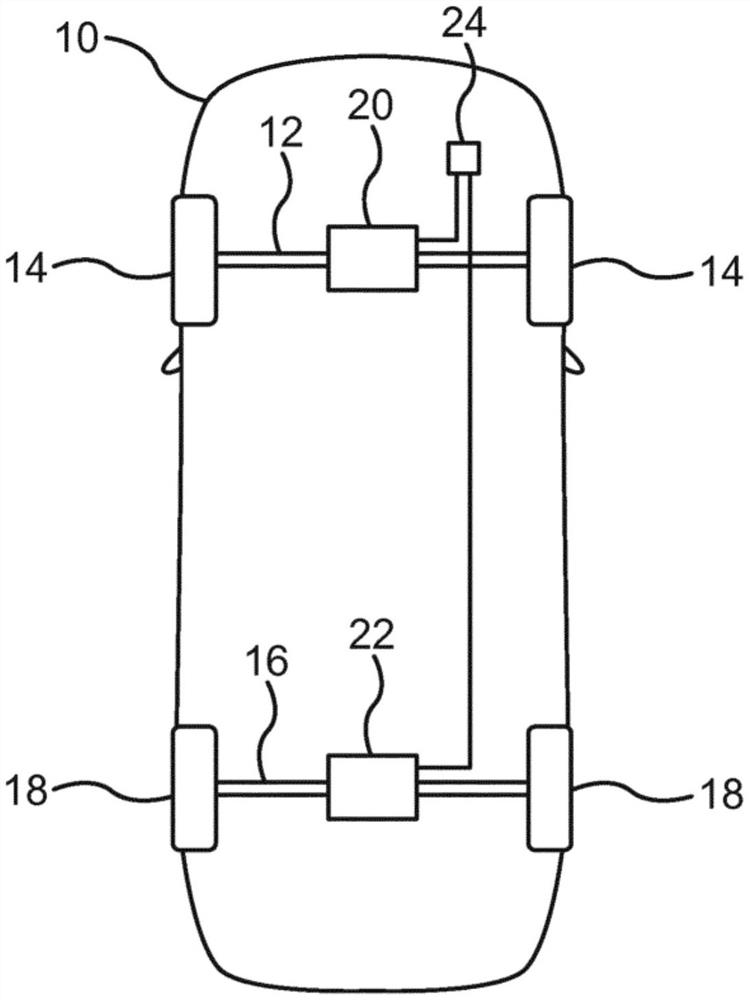
图1以机动车的底侧视角示出机动车的实施方式的示意图;
图2示出方法的实施方式的示意性流程图;
图3a示出在行驶期间在不同时刻的力矩的示意图表;以及
图3b示出在启动过程期间在不同时刻的力矩的示意图表。
下面解释的示例性实施例是本发明的优选实施例。在实施例中,所描述的实施例的各部分分别代表了本发明的各单独的、可视为彼此独立的特征,这些特征分别也彼此独立地改进本发明。因此,本公开还应包括除了实施例特征所示的组合之外的其他组合。此外,所描述的实施例也可以通过本发明的其他已经描述的特征来补充。
在附图中,相同的附图标记表示功能上相同的元件。
具体实施方式
图1示出了从机动车10的底侧的示意图。在该实施例中机动车10是乘用车辆,在其他实施例中可以是例如摩托车,载重汽车或公共汽车。机动车10具有第一车桥12,在该第一车桥上安装有至少一个车轮或者如在该实施例中安装有两个车轮14。另外,机动车10具有第二车桥16,在该示例中,在该第二车桥上安装有两个车轮18。
在该实施例中,第一车桥12是机动车10的前桥,第二车桥16是机动车10的后桥,但是也可以反之。
机动车10具有至少两个驱动电机,其中第一驱动电机20可产生第一力矩,该第一力矩可被传递到第一车桥12的车轮14上。此外可以设置,第一驱动电机20的第一力矩通过车轴传递到车轮14上。但是也可以设置,第一驱动电机20安装在车轮14中并且在那里直接驱动车轮。
与具有第一驱动电机20的第一车桥12类似地,第二驱动电机22可设置在第二车桥16处,第二驱动电机22可将第二力矩传递到第二车桥16的车轮18上。各个车桥产生的力矩例如可以以具有大小和方向的矢量形式表示。
此外,在机动车10中设置有驱动控制器24,该驱动控制器24可以控制第一驱动电机20和第二驱动电机22的运行。特别地,驱动控制器24可以执行用于在机动车10的负载变化时运行至少两个驱动电机的方法。备选地也可以规定,使用多个控制器,所述多个控制器经由车辆总线彼此通信并且执行该方法。负载变化可以是车辆的负载变换,即从驱动电机的滑行运行过渡到牵引运行。
图2中示出了该方法的一个实施方式的示意性流程图,在负载变化的情况下,驱动控制器24可以执行该方法。在步骤S10中确定,是否即将在第一预定时间段内发生负载变化。例如,可能存在这样的情况,由第一驱动电机20产生的第一力矩等于零,并且负载变化是第一力矩的大小变化成不等于零。但是也可以考虑,第一力矩不等于零,也就是说,机动车10可以处于运动中。可以例如借助于所测得的传感器数据来确定是否即将发生负载变化,该传感器数据被发送给驱动控制器24。通过测量可以适当的调整会面临负载变化的第一预定时间段,其例如可以为数秒。
在步骤S12中,如果确定了即将在第一预定时间段内发生负载变化,则在可预定的第二时间段内将例如第二驱动电机22的第二转矩的方向调节为与例如第一驱动电机20的第一力矩的瞬时方向相反。同时可以根据预定的大小来调节第二力矩的大小,该预定的大小优选小于第一力矩的大小,例如为20牛顿米。可预定的第二时间段可以优选被选择成,使得在该时间段内存在负载变化或负载变换的力矩。附加地,在步骤S12中第一力矩增大了预定的大小。也就是说,在确定即将发生负载变化时,设定与第一力矩相反的方向的、大小为例如20牛顿米的第二力矩,同时使第一力矩增加20牛顿米。由此可以补偿总力矩、即第一力矩和第二力矩总和,由此产生恒定的力矩且由此不会产生减速。
在步骤S14中,驱控控制器24确定第二预定时间段是否结束,也就是是否完成了负载变换。
如果在步骤S14中确定了第二预定时间段结束,则在步骤S16中重新将第二力矩调节回第一力矩的方向,同时使第一力矩减少第二力矩的大小。这可以在紧接着第二预定时间段之后的第三预定时间段内进行。第三预定时间段可以例如被选择成,使得第二力矩的调节和第一力矩的减小不是立即进行的,而是由驱动控制装置24通过适当的预控制、例如通过斜坡函数来逐步增加的,和/或用于第一驱动电机20和第二驱动电机22的驱控信号可以通过滤波函数被任意调整。
例如可以设置成,在步骤S16中基于传感器测量使第一力矩减小第二力矩的大小,传感器测量第一驱动电机20的功率参数和第二驱动电机22的功率参数,然后如此调节这两个驱动电机,使得这两个功率参数的总和保持恒定。例如,在此可以测量每个驱动电机所需的电动率,在第二驱动电机22的电功率增加时可以降低第一驱动电机20的电功率,从而在第二力矩向第一力矩的方向变换时使整体消耗的电功率保持恒定。
通过该方法可以例如实现,总力矩总是相当于驾驶员所设定的或期望的推进力矩或制动力矩或回收力矩。
还可以规定,仅当机动车10的速度在阈值内时才执行由驱动控制器24执行的方法。该阈值例如可以是每小时50公里。在高于该阈值时,在负载变换期间产生的噪声例如可以被一般的环境噪声或行驶噪声掩盖,从而不再需要使用该方法在负载变化期间衰减噪声。但是也可以规定,在每次负载变化时都实施所示方法。
在图3a和3b中示意性地示出了机动车10的两个驱动电机在该方法的实施例的不同时刻的力矩。在横坐标M上绘制以牛顿米为单位的力矩大小,在纵坐标a上示出第一驱动电机20的第一力矩M1和第二驱动电机22的第二力矩M2。
在图3a所示的实施例中,机动车10在时刻t
然后,例如可以在方法步骤S10中确定即将发生负载变化,于是在时刻t
在方法步骤S14中确定已经完成负载变化之后,可以在方法步骤S16中重新将第二力矩M2调节成第一力矩M1的方向,例如再次调节至20牛顿米的大小,这在图3a中在时刻t
在图3b中示出的实施例中,机动车10在时刻t
在时刻t
在启动过程中发生负载变化之后,在方法步骤S14中确定已完成负载变化,并且在方法步骤S16中在时刻t
在另一个示例性实施例中,一方面是使各单个驱动电机、即第一驱动电机20和第二驱动电机22的力矩根据需要在相反的方向上起作用。在特别的工作范围内,即当负载发生变化时,驱动一个驱动电机,另一驱动电机调节制动转矩,即与第一方向相反的力矩。由此可以对动力传动系加载,并且两个驱动电机都处于能够使齿面贴靠的限定位置中。
在关键情况下,例如在停止或启动时,可以总是首先通过已经设置在正确的一侧上的驱动电机10来建立所需的力矩。另外的驱动电机则首先充当制动器,然后通过斜坡函数时间延迟地调节预期力矩。可以使用适当的预控制、例如斜坡函数或滤波器任意地表示此力矩调整或力矩分布。
在驱动控制器24中也可以存在不同的行驶程序,即根据速度或转速、驾驶员的要求、行驶等级、行驶程序和/或道路坡度针对两个驱动电机规定力矩。
总体而言,该示例示出了本发明如何能够在两个彼此独立地电驱动的车桥上提供力矩整形。
- 在负载改变时运行至少两个驱动电机的方法和驱动控制器以及具有驱动控制器的机动车
- 用于运行具有至少两个驱动装置的机动车的方法以及具有至少两个驱动装置的机动车