具有人机界面的机器人臂
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及一种机器人臂,具有多个关节和多个节肢,这些节肢分别将两个相邻的关节相互连接,其中至少一个节肢具有人机界面,该人机界面包括至少一个显示装置,该显示装置被构造为显示机器人臂的和/或与机器人臂控制技术连接的控制装置的至少一个系统状态,并且该人机界面包括至少一个输入装置,该输入装置被构造为将至少一个手动输入通过人机界面供应给机器人臂和/或与机器人臂控制技术连接的控制装置。
背景技术
由专利文献EP1566246A1已知一种机器人,其具有显示装置,该显示装置使操作者能够获取检查等所需的信息,而不必使用印刷手册或示教设备的显示屏幕。该显示装置具有柔性屏幕,该柔性屏幕具有有机发光二极管、控制单元和插头。该显示装置插头被插入到设置在机器人臂上合适部位的连接件中,其中显示单元被轻轻地压在机器人臂的表面上。在此,机器人臂的表面可以是弯曲的或平坦的。
发明内容
本发明的目的是提供一种具有人机界面的机器人臂,其能够以特别符合人体工程学的方式进行操作,特别是被手动地操控。
本发明的目的通过一种机器人臂来实现,该机器人臂具有多个关节和多个节肢,这些节肢分别将两个相邻的关节相互连接,其中至少一个节肢具有人机界面,该人机界面包括至少一个显示装置,该显示装置被构造为显示机器人臂的和/或与机器人臂控制技术连接的控制装置的至少一个系统状态,并且该人机界面包括至少一个输入装置,该输入装置被构造为将至少一个手动输入通过人机界面供应给机器人臂和/或与机器人臂控制技术连接的控制装置,其中,所述至少一个输入装置包括布置在节肢的外部罩壁上的触觉型的传感器面,所述至少一个显示装置包括与该触觉型传感器面重叠的显示面,并且人机界面具有操控所述显示装置和所述输入装置的配置装置,该配置装置被设计为,通过利用显示装置照亮输入装置的触觉型传感器面的特定局部面区段,基于显示面和触觉型传感器面的重叠布置而光学地突出触觉型传感器面的该局部面区段,并且控制技术地单独激活触觉型传感器面的该被光学地突出的局部面区段,使得通过在触觉型传感器面的被激活的局部面区段上施加压力而产生由配置装置控制技术地对应于该局部面区段的信号,并将该信号发送到人机界面的分析装置。
通常,机器人包括机器人臂(即,所谓的运动学)和控制机器人臂的控制装置(即,机器人控制器)。除了用于操控机器人臂运动的功能之外,机器人控制器还可以具有其它补充性的控制组件或控制功能。这些其他的补充性控制组件或控制功能可以是根据本发明的人机界面的配置装置和/或根据本发明的人机界面的分析装置。然而,根据本发明的配置装置和/或根据本发明的分析装置可以与机器人控制器分开地设计。根据本发明的配置装置和/或根据本发明的分析装置可以特别是人机界面的结构单元的一部分。根据本发明的配置装置和/或根据本发明的分析装置可以相应地例如布置在机器人臂外部或者是机器人臂的一部分,即,特别是布置在机器人臂的内部。
人机界面代表了一个操作者界面,人员可以利用该界面与机器人或其机器人控制器进行通信。这样的通信可以是单向的或双向的。在一个方向上的通信可以包括:机器人或机器人控制器通知人员机器人或其机器人控制器的某种状态。这可以通过至少一个显示装置来进行。在最简单的情况下,该显示装置可以是发光装置,一旦出现某种对应的状态,该发光装置就会被点亮。在另一个方向上的通信可以包括:人员进行输入,以便向机器人或机器人控制器传达指令或者所期望的机器人或机器人控制器的状态变化。这可以通过至少一个输入装置来进行。在最简单的情况下,该输入装置可以是按键或开关,在其被手动操作时,机器人或机器人控制器执行某种状态切换。该状态切换可以例如是机器人的打开或关闭。
在本发明的情况下,可以提供各种显示装置。可以根据现有技术设计特定的显示装置并且仅显示特定的系统状态。具体地,根据本发明,至少一个显示装置被用于光学地突出机器人臂的触觉型传感器面的一局部面区段,以便向人员光学地展示,正好将触觉型传感器面的该局部面区段作为输入装置被激活,从而可以通过对触觉型传感器面的该局部面区段的操作来进行输入。所期望的、也就是作为输入装置被激活的触觉型传感器面的局部面区段可以通过根据本发明的显示装置被直接或间接地照亮。
在人机界面上的手动输入可以由人员通过例如用人的手指按压输入装置的方式来进行,其中,该手动施加在输入装置上的压力例如被转换为电信号,该电信号被发送给分析装置或机器人控制器,其中,分析装置或机器人控制器被设计为,基于该信号产生某种对应的系统状态。
一个代表性的过程例如是:通过第一输入装置来选择和激活机器人臂的特定轴,即机器人臂的特定关节,该轴应该是被手动地控制,但是被电动驱动地运动。然后,可以通过至少一个第二输入装置以下述的方式使机器人臂的该被选择和激活的关节运动,即,例如由人手动地按压加号键(Plus-Taste)或由人手动地按压减号键(Minus-Taste),以便使机器人臂的该关节(该关节可以特别是转动关节)被电动驱动但是却被手动控制地沿顺时针或逆时针方向运动。
相关的具有根据本发明的人机界面的节肢的外部罩壁可以是该相关节肢的外壳
触觉型传感器面可以被构造为,仅在机器人臂的相关节肢的整个表面的一部分上延伸。然而,触觉型传感器面也可以被构造为,至少基本上或者完全在机器人臂的相关节肢的整个表面上延伸。触觉型传感器面除了根据本发明的功能之外,还可以特别是在用于识别机器人臂与另一对象的碰撞的功能中被设计为、也就是配置为人机界面的一部分。这意味着,在特定的实施方式中,根据本发明的触觉型传感器面可以选择性地不仅是用作人机界面的一部分,还可以用作碰撞识别系统的一部分。
根据本发明,该触觉型传感器面至少被构造并设计为,能够在相应配置的部位上,也就是在局部面区段上,采集、即自动地感知例如人的手、手指或其它身体部位与机器人臂发生接触。例如,触觉型传感器面可以由许多平面分布设置的压力传感器构成。压力传感器在此被构造为采集作用的力,必要时还可以测量其大小。
然而,替代地,例如当触觉型传感器面是由多个平面分布设置的电容式传感器构成时,该触觉型传感器面必要时也能够无压力地或者说几乎无压力地工作。在这种情况下,当例如人的手、手指或其它身体部位并不是施加值得一提的压力而仅是轻微地接触触觉型传感器面时,就已经能够感知到电容传感器的电容的相应变化。尽管如此,在本发明的框架下,“压力”即使是可以几乎或完全为“零”也可以说是压力。
在本发明的框架下,例如可以根据专利文献EP2528234B1来构造可使用的触觉型传感器面。
将显示面和触觉型传感器面重叠布置的技术特征可以优选地以下述方式实现:将显示面构造为薄的层体
照亮触觉型传感器面通常是指显示装置被构造和设计为,光学地突出触觉型传感器面的所期望的局部面区段。这主要意味着显示装置照亮了触觉型传感器面的局部面区段。然而在特定的变型中,光学地突出例如也可以通过以下方式实现:即,触觉型传感器面的所期望的局部面区段不是被直接照亮,而是例如通过利用显示装置照亮该局部面区段形成框架式加边的方式来光学地突出该局部面区段。反过来也是可能的,即,利用显示装置照亮几乎整个触觉型传感器面,只有触觉型传感器面的所期望的和被激活的局部面区段没有被照亮。
配置装置可以被构造为,选择性地动态地照亮触觉型传感器面的第一局部面区段或触觉型传感器面的与该第一局部面区段不同的第二局部面区段。
通过将配置装置构造为选择性地动态地照亮触觉型传感器面的第一局部面区段或触觉型传感器面的与第一局部面区段不同的第二局部面区段,可以选择性地在机器人臂的相关节肢的表面的不同部位上有效地显示特定输入装置。如果机器人臂的多个节肢均具有触觉型传感器面和显示装置,则可以选择性地在一个节肢上或另一个节肢上有效地显示该特定的输入装置。
相应地,配置装置可以被构造为以类似的图示来照亮触觉型传感器面的可选的第一局部面区段或触觉型传感器面的可选的第二局部面区段,通过接触它们而控制技术地产生相同的信号,以便在两个动态配置中激活相同的功能。
但是,通过将配置装置构造为选择性地动态地照亮触觉型传感器面的第一局部面区段或触觉型传感器面的与第一局部面区段不同的第二局部面区段,也可以规定,在节肢的同一部位上,即在相同的第一局部面区段上,例如在不同的时刻有效地显示不同类型的输入装置。以此方式,可以在节肢的准确部位上分别指示和有效地显示特定的输入装置,该输入装置在同一部位上被另一个特定的输入装置取代。具体显示哪个输入装置可以例如由机器人臂的系统状态或者特别是机器人控制器的编程状态得出。例如,可以始终显示预计最合适的输入装置。
配置装置可以例如被构造为,根据机器人臂的当前关节位置(Gelenkstellungen),选择性地动态地照亮触觉型传感器面的第一局部面区段或者触觉型传感器面的与第一局部面区段不同的第二局部面区段。
因此,输入装置可以例如在第一关节位置上有效地显示在节肢的上侧上;而在该节肢枢转180度的情况下,该输入装置被有效地显示在同一节肢上,但是是在该节肢的与目前相比相对置的局部面区段上,因此即使是在节肢的方向枢转180度的情况下,该输入装置仍然是有效地显示在上侧。
相应地,配置装置可以被构造为,保持触觉型传感器面的被光学地突出的局部面区段的形状,并且在机器人臂的具有人机界面的节肢的瞬时位置和/或方向发生改变时,关于触觉型传感器面的位置和/或方向动态地调整该被光学地突出的局部面区段,使得通过触觉型传感器面的被光学地突出的局部面区段所产生的虚拟的输入装置保持其在空间中的位置和/或方向。
配置装置可以被构造为,根据操作人机界面的人员相对于机器人臂的位置,选择性地、动态地照亮触觉型传感器面的第一局部面区段或触觉型传感器面的与该第一局部面区段不同的第二局部面区段。
因此,当人员、即例如机器人编程者将其位置从机器人臂的一侧变换到机器人臂的另一侧时,例如即使是在机器人臂的关节位置保持不变的情况下,也可以适宜地使输入装置从相应节肢的一侧移动到该节肢的相对置的一侧。
机器人臂的至少一个具有人机界面的节肢的触觉型传感器面可以被构造并设计为,检测节肢与其它对象的意外碰撞,但是在此为了检测意外的碰撞,触觉型传感器面的下述局部面区段被停用:这些局部面区段被激活以形成输入装置,使得在接触到触觉型传感器面的被激活的局部面区段时,产生由配置装置控制技术地对应于该局部面区段的信号。
由此可以避免将通过按键在人机界面上的有意手动输入在控制技术上错误地视为意外碰撞。
机器人臂的至少一个具有人机界面的节肢的触觉型传感器面可以被构造和设计为,检测节肢与其它对象的意外碰撞,并且在发生碰撞事件时,只有在碰撞力超过预定的压力边界值时才会产生表征意外碰撞的第一信号,其中,触觉型传感器面的局部面区段,该局部面区段被激活以形成输入装置,使得在接触到触觉型传感器面的该被激活的局部面区段时,产生由配置装置控制技术地对应于该局部面区段的信号,只有在输入力低于预定的压力边界值时,才会产生表征输入的第二信号。
由此也可以避免将通过按键在人机界面上的手动输入在控制技术上错误地视为意外碰撞。
替代地或附加地,机器人臂的至少一个具有人机界面的节肢的触觉型传感器面被构造和设计为,形成使能开关装置(Zustimmschaltmittel),其中,触觉型传感器面的被激活以形成该使能开关装置的局部面区段,在触觉型传感器面的该被激活的局部面区段被接触时,只有在输入力低于预定的最大压力边界值并且高于预定的最小压力边界值时,才会产生由配置装置控制技术地对应于该局部面区段的使能信号。
这样的机械式使能开关装置通常在单独的机器人操作手持设备中是已知的,并且有时也出于安全技术原因来设定。这种使能开关装置通常具有“紧急功能(Panikfunktion)”,即,一方面,只有当使能开关装置是以一定的手指力被手动操作时,才能通过机器人操作手持设备来操控机器人臂的运动。如果使能开关装置未被操作,则机器人臂不会运动。然而,如果以一定的手指力操作的使能开关装置被挤压超过最大力,例如在惊吓情况下,此时操作者会下意识地用手指抓紧,则使能开关装置可以说是被“过度按压”,并且使机器人臂能够运动的能力被立即撤回,即,关闭了使能开关装置。就此而言,在根据本发明的实施发生变型中,利用触觉型传感器面是通过可编程的力感测式触摸使能开关装置代替了已知的机械使能开关装置。在此特别有利的是,最大压力边界值和/或最小压力边界值可以被控制技术地、特别是编程技术地、即软件配置地单独调整和/或设定。
所述对触觉型传感器面的局部面区段的光学突出和/或对触觉型传感器面的光学突出的局部面区段的激活可以被构造为,能够通过配置装置关闭。
所述对触觉型传感器面的局部面区段的光学突出和/或对触觉型传感器面的光学突出的局部面区段的激活可以由配置装置在预定时间之后自动地关闭。
配置装置可以关于触觉型传感器面的被光学突出的局部面区段的位置、方向和/或形状以及在接触触觉型传感器面的局部面区段时所产生的对应信号的相应类型是可编程的。
配置装置可以被构造和设计为,借助于与配置装置分开的控制装置、特别是借助于机器人臂的机器人控制器或者便携式平板电脑,进行其编程。
除了用于照亮输入装置的触觉型传感器面的特定局部面区段的至少一个显示装置之外,配置装置还可以具有至少一个另外的显示装置,该另外的显示装置被构造为仅用于显示其它的信息,而不需要对应于触觉型传感器面的特定局部面区段。
相应地,根据本发明的人机界面的至少一个显示装置也可以被构造为简单的没有输入功能的显示装置,从而使得根据本发明的人机界面也能够与形成输入装置无关地示出附加的显示。这样的显示也可以是在不形成输入装置的情况下具有说明性或指示性功能的例如文本、图像或符号。
触觉型传感器面可以包括压敏式皮肤和/或电容式接近传感器。触觉型传感器面可以例如根据专利文献EP2528234B1来构造。
显示装置可以具有柔性的LED显示屏。
下面再次概括性地描述本发明,有时会使用不同的表达方式。
通过操作单元的,也就是被激活的机器人皮肤、即机器人节肢的表面中的输入装置的可变的渐显(variable Einblenden),可以为机器人臂的局部区域分配输入功能。在此,这些局部区域始终可以被选择为,使得它们对于使用者而言具有良好的可及性。由此将始终确保操作元件的可访问性。
以光学方式示出的操作元件或输入装置可以例如是能够被编程的按键或滑块。这可以是例如用于示教的按键、用于输入数字的整个数字面板(Nummernfeld)。滑块可以例如被编程为,能够通过从机器人臂的另一部位上的按键,利用机器人臂的特别是另一节肢上的输入装置进行操控地,使例如难以用手接近以进行手动调节的轴,即关节,运动。
被编程的操作元件的可变渐显功能可以与触觉型机器人皮肤传感器,即触觉型传感器面,结合使用。在此,机器人皮肤的区域为了识别意外的碰撞而被渐隐,并替代于此地分配了具体的功能。然而,在这种情况下不能识别机器人的意外碰撞。
因此,也可以停用机器人皮肤中的操作元件的可变渐显功能。由此能够确保机器人皮肤的所有被激活的区域都能够识别意外碰撞。
可变操作面板的编程可以通过例如“App”形式的软件来进行。
平板电脑可以用于被编程的操作面板的渐显。
必要时,可以为渐显的操作面板设定时间延迟,使得其在编程的时间段之后被自动地停用。
在使用电容式皮肤传感器时,也可以使用操作元件的渐显。
例如,可以将能够被编程的LED集成在被激活的皮肤中,该皮肤可以是触觉式的或电容式的皮肤。编程一方面是指能够打开和接通LED,从而能够示出任意的符号,另一方面是指为皮肤的有LED示出符号的区域定义一种功能,该功能可以在手动按压在该皮肤区域上时被执行。在此,可以对一力阈值进行编程,必须超过该力阈值才能进行输入识别。
通过本发明,解除了之前对输入装置的固定位置绑定,有利于输入装置的动态布置,即,LED能够可变地集成、即“显现”在皮肤中的多个部位上。LED能够以任何颜色示出任意的符号(例如,按键、滑块、按键面板等)。所示出的符号可以链接到可编程的功能。可以对力阈值进行编程以识别输入和/或激活功能。皮肤操作功能的激活可以通过操作元件来实现,例如在机器人足上通过移动操作设备来实现。
皮肤的柔软性在该部位上不受干扰。可以为皮肤的被激活用于已编程输入的区域的提供碰撞识别的停用。可编程的“超时(Timeout)”可用于停用渐显的符号和/或功能。
实现的示例性选项为:
根据本发明的人机界面的基础可以用硬壳形成。在该硬壳上可以安装活性的皮肤(触觉的或电容式的)。例如,特别合适的具有集成的可编程LED的材料可以沿该活性皮肤被拖拉并固定。
附图说明
下面将参照附图详细阐述本发明的具体实施例。这些示例性实施例的具体特征可以根据需要被单独地或组合地考虑来表示本发明的一般性特征,而与它们具体在本文中哪里被提到无关。其中,
图1为示例性机器人臂,其具有多个关节和连接这些关节的节肢,
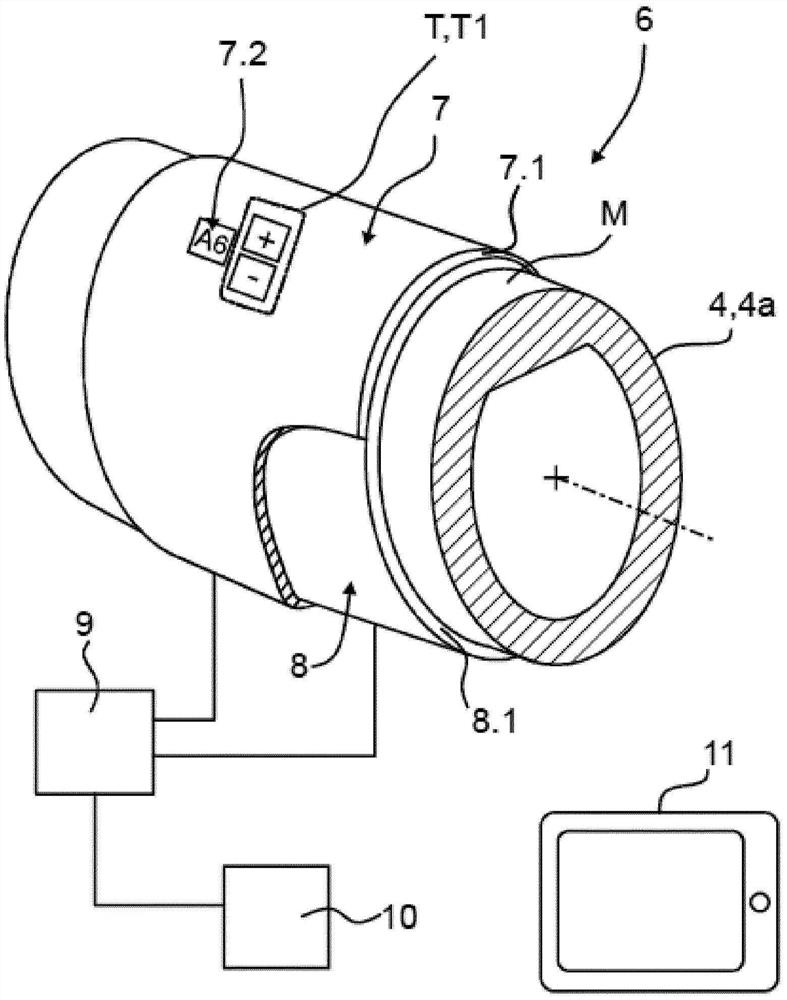
图2示出了机器人臂的代表性节肢处于第一节肢位置的示意性剖视图,其具有根据本发明的人机界面,和
图3示出了根据图2的节肢处于第二节肢位置的示意性剖视图。
具体实施方式
在图1中示出了机器人1的一种代表性实施例,其具有机器人臂2和相关的机器人控制器3。机器人臂2具有多个节肢4和使这些节肢4相对于彼此调节的关节5。每个关节5由机器人臂2的关节马达来驱动。机器人控制器3被构造和设计为操控关节马达,以便通过对关节5的自动调节使机器人臂2的节肢4运动。
相应的,机器人臂2具有多个电动驱动的关节5和多个节肢4,这些节肢分别将这些被驱动的关节5中的两个相邻的关节5相互连接,其中,至少一个节肢4具有承载结构部件,该承载结构部件被构造为将力和/或力矩从一个相邻的关节5.1传递到另一个相邻的关节5.2。在本实施例中,所述多个节肢4中的一个节肢4a配备有人机界面6。然而,通常是机器人臂2的两个、更多个甚或是所有的节肢4均可以具有自己的人机界面6。
如图2和图3中示意性示出的,人机界面6具有至少一个显示装置7,该显示装置被构造为显示机器人臂2和/或与机器人臂2控制技术连接的控制装置3的至少一个系统状态。此外,人机界面6还具有至少一个输入装置8,该输入装置被构造为,将至少一个手动输入通过人机界面6输送给机器人臂2和/或与机器人臂2控制技术连接的控制装置3。
根据本发明,所述至少一个输入装置8包括布置在节肢4、4a的外部罩壁M上的触觉型传感器面8.1,并且所述至少一个显示装置7包括与触觉型传感器面8.1重叠的显示面7.1。人机界面6具有操控显示装置7和输入装置8的配置装置9,该配置装置被设计为,通过利用显示装置7照亮输入装置8的触觉型传感器面8.1的特定局部面区段T,基于显示面7.1和触觉型传感器面8.1的重叠布置而光学地突出触觉型传感器面8.1的该局部面区段T,并且控制技术地单独激活触觉型传感器面8.1的该被光学突出的局部面区段T,使得通过在触觉型传感器面8.1的被激活的局部面区段T上施加压力而产生由配置装置9控制技术地对应于该局部面区段T的信号,并将该信号发送到人机界面6的分析装置10。
在本实施例中,配置装置9被构造为,选择性地、动态地照亮触觉型传感器面8.1的第一局部面区段T1(图2)或触觉型传感器面的与该第一局部面区段T1不同的第二局部面区段T2(图3)。
配置装置9特别是被构造为,以类似的图示来照亮触觉型传感器面8.1的可选的第一局部面区段T1或触觉型传感器面8.1的可选的第二局部面区段T2,在触摸它们时会控制技术地产生相同的信号,以便在两个动态配置中激活相同的功能,如图2和图3中所示。
配置装置9特别是被构造为,根据机器人臂2的当前关节位置,选择性地、动态地照亮触觉型传感器面8.1的第一局部面区段T1或者触觉型传感器面8.1的与该第一局部面区段T1不同的第二局部面区段T2。
配置装置9可以特别是被构造为,保持触觉型传感器面8.1的被光学突出的局部面区段T、T1、T2的形状,并且在机器人臂2的具有人机界面6的节肢4a的瞬时位置和/或方向发生改变时,关于触觉型传感器面8.1的位置和/或方向动态地调整被光学突出的局部面区段T、T1、T2,使得通过触觉型传感器面8.1的被光学突出的局部面区段T、T1、T2所产生的虚拟的输入装置8保持其在空间中的位置和/或方向。
机器人臂2的至少一个具有人机界面6的节肢4a的触觉型传感器面8.1还可以特别是被构造和设计为,检测该节肢4a与其它对象的意外碰撞,但是在此为了检测意外碰撞,需要使触觉型传感器面8.1的下述的局部面区段T、T1、T2停用:这些局部面区段被激活以形成输入装置8,使得在接触到触觉型传感器面8.1的该被激活的局部面区段T、T1、T2时,产生由配置装置9控制技术地对应于该局部面区段T、T1、T2的信号。
替代地,机器人臂2的至少一个具有人机界面6的节肢4a的触觉型传感器面8.1可以被构造和设计为,检测节肢4a与其它对象的意外碰撞,并且在发生碰撞事件时,只有在碰撞力超过预定的压力边界值时才会产生表征意外碰撞的第一信号,其中,触觉型传感器面8.1的局部面区段T、T1、T2,这些局部面区段被激活以形成输入装置8,使得在接触到触觉型传感器面8.1的该被激活的局部面区段T、T1、T2时,产生由配置装置9控制技术地对应于该局部面区段T、T1、T2的信号,只有在输入力低于预定的压力边界值时,才会产生表征输入的第二信号。
对触觉型传感器面8.1的局部面区段T、T1、T2的光学突出和/或对触觉型传感器面8.1的光学突出的局部面区段T、T1、T2的激活可以被构造为,能够通过配置装置9关闭。
对触觉型传感器面8.1的局部面区段T、T1、T2的光学突出和/或对触觉型传感器面8.1的光学突出的局部面区段T、T1、T2的激活可以通过配置装置9在预定时间之后自动地关闭。
配置装置9可以关于触觉型传感器面8.1的光学突出的局部面区段T、T1、T2的位置、方向和/或形状以及关于在接触到触觉型传感器面8.1的局部面区段T、T1、T2时所产生的对应信号的相应类型是可编程的。
配置装置9特别是被构造和设计为,借助于与配置装置9分开的控制装置,特别是借助于机器人臂2的机器人控制器3或便携式平板电脑11,进行其编程。
除了用于照亮输入装置8的触觉型传感器面8.1的特定局部面区段T、T1、T2的至少一个显示装置7之外,配置装置9还可以具有至少一个另外的显示装置7.2,该另外的显示装置被构造为仅用于显示其它的信息,而不需要对应于触觉型传感器面8.1的特定局部面区段T、T1、T2。
在本实施例中,触觉型传感器面8.1是压敏式皮肤并且可以额外地具有电容式的接近传感器。在本实施例中,显示装置7具有柔性LED显示屏。
- 具有人机界面的机器人臂
- 机器人臂驱动装置以及具有该驱动装置的机器人臂