一种红外周视的人工智能检测抽油机运行状态系统、方法、设备及存储介质
文献发布时间:2023-06-19 11:45:49
技术领域
本发明是一种红外周视的人工智能检测抽油机运行状态方法,尤其涉及一种红外周视的人工智能检测抽油机运行状态系统、方法、设备及存储介质,属于油田信息处理领域。
背景技术
由于野外地域辽阔,油田内抽油机的工作状态是需要监控的,如果抽油机长时间因故障停机会影响采油的工作效率,如何判断抽油机是否工作,是目前亟需的一种解决方案。传统上对抽油机的工作状态判别还依赖于巡井工人,这样的方式人工强度大,时间长,发现不及时等问题。单井的视频监控还过于单一,监控范围较小,受设备完好率限制。
发明内容
本发明为了解决现有技术无法同时对多个抽油机的工作状态进行高效判别的问题;提出一种红外周视的人工智能检测抽油机运行状态的分析方法及其系统本发明的技术方案如下:
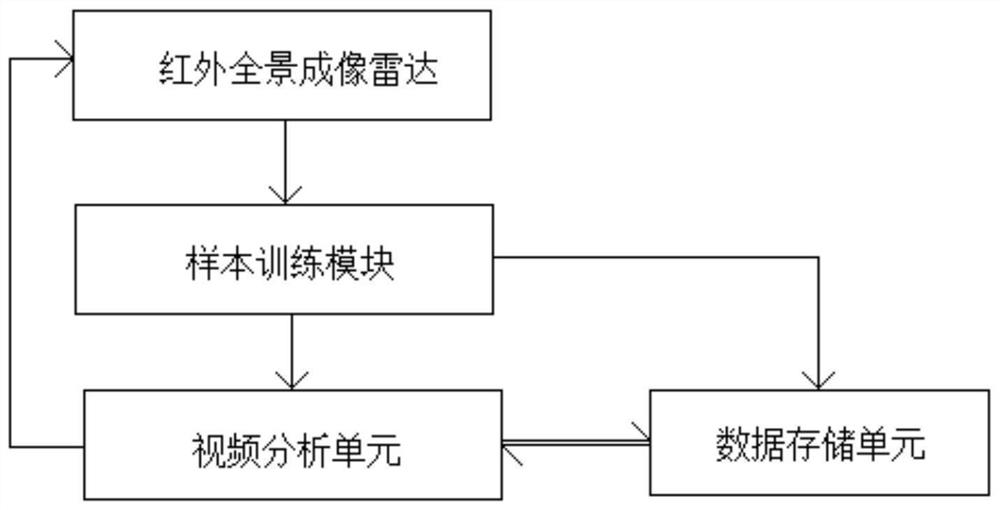
方案一:一种红外周视的人工智能检测抽油机运行状态系统,该系统包括红外全景成像雷达,样本训练模块,视频分析单元和数据存储单元;
红外全景成像雷达为系统核心,负责红外扫描区域全景并形成图像;
红外全景成像雷达连接有样本训练模块,负责将红外全景成像雷达形成的图像的样本集进行标注;
通过样本训练模块连接有视频分析单元和数据存储单元,其中视频分析单元负责对抽油机工作状态进行识别,并将识别结果数据传输返回红外全景成像雷达;
视频分析单元与数据存储单元双向连接,其中数据存储单元负责将样本训练模块和视频分析单元产生的数据进行存储并供其读取。
进一步地,所述红外全景成像雷达,扫描速率是360°/s,型号为ARD-IMR-C;
所述样本训练模块,其中包括由深度学习算法构成的深度学习模型,用于整理图像的样本集。
方案二:一种红外周视的人工智能检测抽油机运行状态方法,是根据方案一所述的系统为基础而实现的,具体方法步骤如下:
步骤a,架设一台频率为1Hz的红外全景成像雷达,对覆盖范围内360°方向扫描油井工作状态并形成图像;
步骤b,对不同距离,不同大小,不同角度的抽油机进行模型训练,并将训练好的样本存入数据存储单元;
步骤c,在红外全景成像雷达上对需要监测的抽油机分别画定检测区域,并标注好抽油机的名称;
步骤d,视频分析单元根据训练的数据模型,在雷达周扫的过程中判断抽油机运动部件是否有运动轨迹,以此识别抽油机的工作状态,对识别出的结果输出到数据存储单元;
步骤e,多次对抽油机工作状态进行识别以及判定结果进行统计,并标注在所述红外全景成像雷达的形成图像当中,完成人工智能检测抽油机运行状态的方法。
进一步地,在步骤b中,具体采集距离为500-3000米范围内,每400-500米范围内的抽油机样本;每个距离范围内采集正侧面,斜侧面的倾斜角度大于15°的抽油机样本。
进一步地,所述的模型训练,指建立关于抽油机样本的深度学习模型,通过深度学习算法训练出至少10000张的抽油机样本,并组建成样本集存储于数据存储单元。
进一步地,对样本集进行模型训练的过程,包括增加噪声、模糊和翻转处理;其中所述增加噪声指使用高斯噪声对图像加噪;所述翻转包括水平翻转和垂直翻转。
进一步地,在步骤d或e中,所述对识别出的结果输出到数据存储单元的过程,所述的抽油机的工作状态包括停止和正常运转,记录抽油机工作正常运转输出为1,停止为0 作为存储结果;
所述对抽油机工作状态的判定方法,包括红外全景成像雷达对检测区域内的抽油机进行样本比对识别,识别出抽油机的相对位置,角度和运动部件朝向;根据每帧数据之间进行对比,检测抽油运动部件的位移量,每隔15s对本周期位移量进行判定。
进一步地,在步骤e中,所述的多次识别以及对抽油机工作状态识别结果进行统计,具体以判定结果次数最多的为准;在雷达上标注抽油机工作状态框,将未工作的抽油机做出报警,并以虚线框形式圈注,工作的抽油机实框圈注并做记录。
方案三:一种红外周视的人工智能检测抽油机运行状态装置,包括存储器和处理器,存储器存储有计算机程序,所述的处理器执行所述计算机程序时实现方案一或二所述的一种红外周视的人工智能检测抽油机运行状态方法的步骤。
方案四:一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现方案一或二或三所述的一种红外周视的人工智能检测抽油机运行状态方法。
本发明相对于现有技术具有以下有益效果:
本发明提供了通过已建的红外全景成像雷达视频监控的方式对广域油井的工作状态进行快速识别,可以通过一套设备在雷达周扫的过程中,同时对多台抽油机进行可视化监控和识别,对工作异常的抽油机进行发现和报警,从而降低能源损耗;
本发明可以最大程度发挥设备应有的功效,大大节约了人力成本,缩短了抽油机故障发现的时间,适应市场应用的多变要求,挽回大量的油田经济损失。
附图说明
图1是一种红外周视的人工智能检测抽油机运行状态系统结构图;
图2是一种红外周视的人工智能检测抽油机运行状态方法逻辑关系图;
图3是一种红外周视的人工智能检测抽油机运行状态雷达效果示意图。
具体实施方式
以下将结合附图对本发明进行详细说明。
具体实施方式一:一种红外周视的人工智能检测抽油机运行状态系统,该系统包括红外全景成像雷达,样本训练模块,视频分析单元和数据存储单元;利用红外全景成像雷达为系统核心,负责红外扫描区域全景并形成图像;红外全景成像雷达连接有样本训练模块,负责将红外全景成像雷达形成的图像的样本集进行标注;通过样本训练模块连接有视频分析单元和数据存储单元,其中视频分析单元负责对抽油机工作状态进行识别,并将识别结果数据传输返回红外全景成像雷达;视频分析单元与数据存储单元双向连接,其中数据存储单元负责将样本训练模块和视频分析单元产生的数据进行存储并供其读取。
具体实施方式二:一种红外周视的人工智能检测抽油机运行状态方法,如图2所示,具体实施步骤如下:
步骤a、架设一台红外全景成像雷达,其可对覆盖范围内360°方向扫描油井工作状态,频率是1Hz;
步骤b、对不同距离,不同大小,不同角度的抽油机进行模型训练,并将训练好的样本存入数据存储单元;
步骤c、在红外全景成像雷达上对需要监测的抽油机分别画定检测区域,并标注好抽油机的名称;
步骤d、视频分析单元根据训练的数据模型,在雷达周扫的过程中判断抽油机运动部件是否有运动轨迹,以此作出抽油机是否工作的识别;
步骤e、多次对抽油机工作状态进行判定,多次判定结果统计后,以状态多的数值为准。同时对抽油机的工作状态进行输出,将未工作的抽油机做出报警,并以虚线框形式圈注,工作的抽油机实框圈注并做记录。
具体地,该方法包括:构建用于识别抽油机的工作状态的识别模型。
具体地,所述抽油机的工作状态包括:停止和正常运转。
具体地,对红外全景成像雷达的重点关注抽油机画定检测区域,区域正好涵盖整个抽油机。
具体地,在训练所述识别模型的过程中,利用数据存储样本模型,先识别出抽油机在图像画面中的相对位置,再对抽油机的运动部件进行识别,每秒1帧进行识别,再根据每帧图像对比,判定抽油机运动部位是否有移动。
具体地,对判定结果进行统计,以判定结果次数多的数据为准。从而对红外全景成像雷达上抽油机做出标注。
具体地,将判定结果再输入数据存储单元。
优选的,所述对红外全景成像雷达输出的抽油机模型制作样本集的方法,包括架设一台红外全景成像雷达,扫描速率是360°/s,型号为:ARD-IMR-C。采集到不同距离,约500-3000米范围内,每400-500米范围内的抽油机样本。每个距离范围内采集正侧面,斜侧面等倾斜角度大于15°的抽油机样本。通过深度学习模型,训练出10000张以上的抽油机样本,并组建成样本集,存储于数据存储单元。
优选的,为了让样本集更丰富,且具有一定的容错性,需要对样本进行一定技术手段处理,可以采用:(1)增加噪声:使用高斯噪声对图像加噪;(2)模糊处理;(3)翻转:包括水平翻转和垂直翻转。
优选的,在红外全景成像雷达上对需要识别的抽油机进行检测区域画定。把需要检测的抽油机都用框体圈画出来,并标出抽油机的名称。
优选的,所述对抽油机工作状态的判定方法,包括红外全景成像雷达对检测区域内的抽油机进行样本比对识别,识别出抽油机的相对位置,角度和运动部件朝向。
每帧数据之间进行对比,检测抽油运动部件的位移量,每隔一定时间(约15秒)对本周期位移量进行判定。经市场调研发现抽油的最大位移量时间出现在15秒左右,即抽油机驴头在最低点移动到最高点约15秒周期内。
多次识别后对抽油机工作状态识别结果进行统计,以判定结果次数多的为准。在雷达上标注抽油机工作状态框,将未工作的抽油机做出报警,并以虚线框形式圈注;工作的抽油机实框圈注。
优选的,对识别出的结果输出到数据存储单元。抽油机工作输出为1;否为0。
具体实施方式三:根据具体实施方式一或二描述的系统及方法,该系统及方法可承载于计算机程序实现,并由数据库存储数据以备调用;
具体地,该系统包括电子设备;可读存储介质;一个或多个处理器;存储器;多个应用程序;以及一个或多个计算机程序;其中所述一个或多个计算机程序被存储在所述存储器中,所述一个或多个计算机程序包括指令。
具体点,所述数据库为SQL Server2005及以上版本。
本领域技术人员应该可以意识到,在上述一个或多个示例中,本发明所描述的功能可以用硬件、软件、固件或它们的任意组合来实现。当使用软件实现时,可以将这些功能存储在计算机可读介质中或者作为计算机可读介质上的一个或多个指令或代码进行传输。计算机可读介质包括计算机存储介质和通信介质,其中通信介质包括便于从一个地方向另一个地方传送计算机程序的任何介质,存储介质可以是通用或专用计算机能够存取的任何可用介质。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的技术方案的基础之上,所做的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。