一种基于激光扫描堤岸测量水位的方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明属于水文监测设备的技术领域,具体一种基于激光扫描堤岸测量水位的方法与装置。
背景技术
水位是反映水体、水流变化的重要标志,水位观测可直接用于水文情报预报,为防汛抗旱、灌溉、航运及水利工程的建设、运用和管理等及时提供水情信息。长期积累的水位资料是水利水电、桥梁、航道、港口、城市给排水等的建设规划设计的基本依据。目前常用的水位在线传感器分为两类,一类为接触式测量主要为感压式和浮子式,压力式一般受水体中含沙量影响,在含沙量较多的河道误差较大,浮子水位需要建立静井工程量巨大耗费较高。另一类是非接触式水位计,一般为雷达和超声波式水位计此类水位计必须垂直发射到水面具有安装困难、发射路径单一容易被遮挡以及在枯水位底部不平的情况下数据测量不准的缺点,目前水文行业依旧在使用几十年前的浮子水位,设备和技术都较为陈旧落后,不利于水文现代化建设。
发明内容
本发明的目的是在于针对现有技术存在的上述问题,提供一种基于激光扫描堤岸测量水位的方法与装置,解决目前非接触式水位计安装困难、发射路径单一容易被遮挡以及在枯水位底部不平的情况下数据测量不准等问题。
本发明的上述目的通过以下技术方案实现:
一种基于激光扫描堤岸测量水位的方法,包括以下步骤:
步骤1、设置激光雷达沿堤岸坡面上的扫描线进行扫描,扫描线垂直于堤岸横向延伸方向,扫描线自坡顶至坡底延伸,激光雷达沿扫描线从上往下扫描,当激光雷达未收到扫描点的反射激光后,激光雷达转到下一条扫描线重复本步骤直至扫描完所有的扫描线;
步骤2、计算扫描点与激光雷达的距离;
步骤3、根据激光雷达发射出激光与竖直方向的角度获得扫描点到激光雷达的高程差,计算扫描点相对黄海的高程为激光雷达的高程减去扫描点到激光雷达的高程差;
步骤4、每条扫描线对应的最后一个获得有效距离的扫描点即为扫描线对应的水位扫描点,计算各个水位扫描点对应的水位高度。
如上所述的步骤3还包括以下步骤:
根据各个扫描点相对于黄海的高程以及各个扫描点对应的激光雷达的激光角度的发射方向,建立堤坝模型。
如上所述的步骤3还包括以下步骤:
根据多次对堤岸坡面的扫描获得的各个扫描点相对于黄海的高程,获得堤坝变形。
如上所述的步骤4还包括以下步骤:
根据下式剔除异常水位数据,
式中,h
一种基于激光扫描堤岸测量水位的方法,还包括以下步骤:
步骤5、将认定为异常数据的水位高度剔除后,剩下的水位高度计算算术平均值作为真实水位高度。
本发明与现有技术相比,具有以下优点:
1、激光雷达穿透力强、发射角度小、强测量距离远;
2、不受反射面影响,底部不平不影响数据准确性;
3、安装方便无需垂直对准水面,可以任意角度扫描;
4、扫描途径多样化避免遮挡;
5、测量范围大,精度高;
6、具有自我判断,校正,学习功能,避免数据误差;
7、具有水位和堤坝安全监测双功能。
附图说明
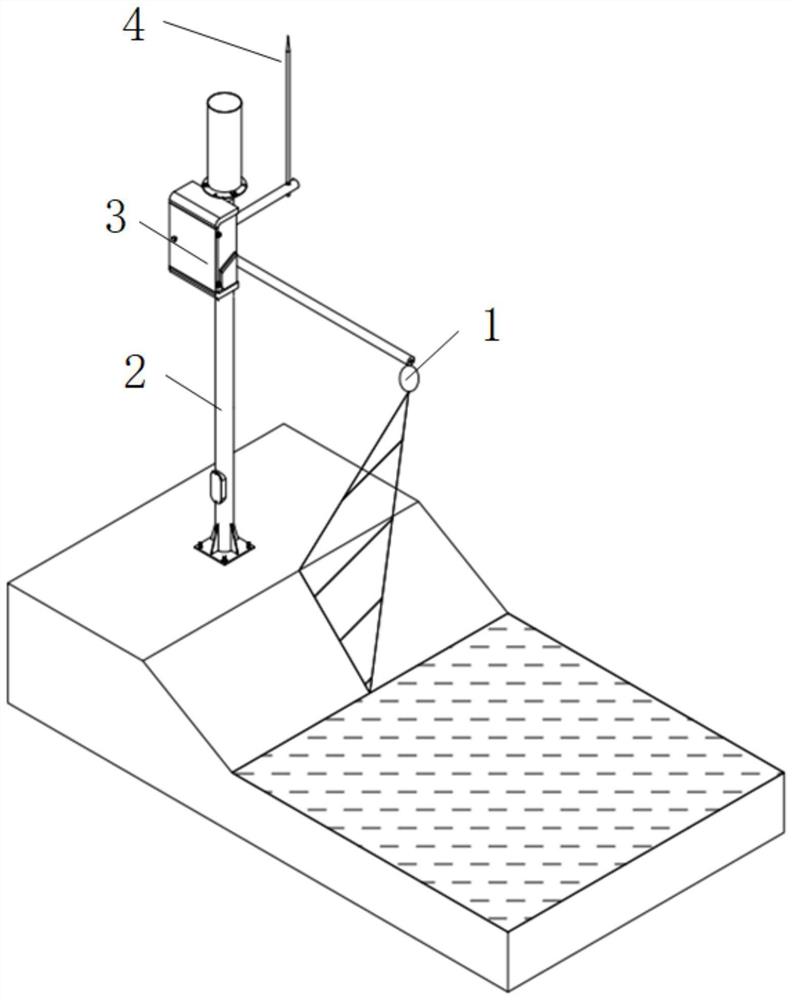
图1为本发明的结构图。
图中:1-激光雷达;2-立杆;3-设备控制箱。
具有实施方式
为了便于本领域普通技术人员理解和实施本发明,下面结合实施例对本发明作进一步的详细描述,应当理解,此处所描述的实施示例仅用于说明和解释本发明,并不用于限定本发明。
如图1所示,一种基于激光扫描堤岸测量水位的装置,包括设置激光雷达1、立杆2、设备控制箱3和发射天线4,立杆2设置在坝顶,设备控制箱3和发射天线4均设置在立杆2上,设备控制箱3分别和发射天线4和激光雷达1连接,横杆与立杆2连接,激光雷达1设置在横杆上。
激光雷达1相对黄海高程为H(即探头安装点海拔),设定激光雷达1的坐标为XYZ轴坐标原点,垂直方向为Y轴方向,X轴和Y轴垂直且均位于水平面,激光雷达1可根据现场需要设置扫描方向,设置激光雷达1沿堤岸坡面上的扫描线进行扫描,扫描线垂直于堤岸横向延伸方向,扫描线自坡顶至坡底延伸,确保需要测量的区域S均在扫描范围内。
一种基于激光扫描堤岸测量水位的方法,包括以下步骤:
步骤1、设置激光雷达1沿堤岸坡面上的扫描线进行扫描,扫描线垂直于堤岸横向延伸方向,扫描线自坡顶至坡底延伸,激光雷达1沿扫描线从上往下扫描,当扫描带水岸分界点时,激光无法被反射回,当激光雷达1未收到扫描点的反射激光后,激光雷达1转到下一条扫描线重复本步骤直至扫描完所有的扫描线;
步骤2、激光雷达1发射出激光在扫描线的扫描点反射回来后,计算扫描点与激光雷达的距离
步骤3、根据激光雷达1发射出激光与竖直方向的角度θ可知扫描点到激光雷达1的高程差为cosθ。扫描点相对黄海的高程为激光雷达的高程减去扫描点到激光雷达1的高程差。
记第i条扫描线上从上至下的各个扫描点相对于黄海的高程依次为h
设备控制箱3根据各个扫描点相对于黄海的高程以及各个扫描点对应的激光雷达1的激光角度的发射方向,建立堤坝模型,
设备控制箱3根据多次对堤岸坡面的扫描获得的各个扫描点相对于黄海的高程,可分析堤坝变形趋势,对堤坝存在或已发生的安全隐患进行预防和报警。
步骤4、由于水体无法反射激光,每条扫描线对应的最后一个获得有效距离的扫描点即为扫描线对应的水位扫描点,计算各个水位扫描点对应的水位高度,记沿堤岸延伸方向分布的各个扫描线对应的水位高度构成水位高度数组[h
式中,h
步骤5、将认定为异常数据的水位高度剔除后,剩下的水位高度的算术平均值即为真实水位高度,设备控制箱3将获得的真实水位高度、各个扫描点相对于黄海的高程、各个扫描点对应的激光雷达1的激光角度、以及堤坝模型通过发射天线4对外发送。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
- 一种基于激光扫描堤岸测量水位的方法
- 一种基于激光扫描仪的掘进机位姿测量装置及其测量方法