一种多向输送机
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及物流输送设备技术领域,特别是一种多向输送机。
背景技术
输送机是在一定线路上连续输送物料的物料运输机械,输送机的输送路线一般是固定的,现在市面上的很多输送机大多只能单向输送,在实际输送过程中,常常存在需要将一条输送线上物品移载到另一条输送线上的情况,由于传动输送线的结构限制,无法实现两条输送线的交叠设置,影响工作效率。
发明内容
本发明的目的是提供一种多向输送机,以解决背景技术中提出的问题。
本发明的技术解决方案是:一种多向输送机,包括输送架、设在所述输送架上的机架、设在所述机架端部的第一转角架、和所述第一转角架垂直连接的第二转角架、间隔设在所述机架上以及相对的所述第一转角架之间的第一滚筒、间隔设在相对的所述第二转角架之间的第二滚筒、多个可穿过相邻所述第一滚筒间隙的中间输送机构、用于驱动所述中间输送机构升降的升降驱动机构,相对的所述第一转角架之间形成有第一通道,相对的所述第二转角架之间形成有第二通道。
作为优选,所述中间输送机构包括框架、多组镜像设在所述框架上的第一机身板和第二机身板、贯穿所述第一机身板和所述第二机身板的主动辊、固接在所述第一机身板和所述第二机身板上用于支撑所述主动辊两端的附板、用于驱动所述主动辊旋转的旋转驱动部、设在所述第一机身板和所述第二机身板顶部之间的悬挂板、通过安装板连接在所述悬挂板两端的第一改向轮、连接所述第一改向轮以及所述主动辊的片基带。
作为优选,所述第一机身板和所述第二机身板之间对称设有第二改向轮。
作为优选,所述主动辊包括杆体、对应所述第一机身板和所述第二机身板设在所述杆体上的环形凸起,所述片基带和所述环形凸起接触。
作为优选,所述第一机身板和所述第二机身板均开设有用于所述主动辊通过的通孔,所述通孔为U形。
作为优选,所述通孔和所述杆体之间具有间隙。
作为优选,所述升降驱动机构包括固接在所述输送架上的气缸安装板、用于推动所述框架的气缸、用于导向所述框架直线移动的导向杆,所述导向杆和所述气缸安装板滑动连接。
本发明有益效果是:
与现有技术相比,本发明通过设置中间输送机构,实现了多货物的多方向输送,提高工作效率。
附图说明
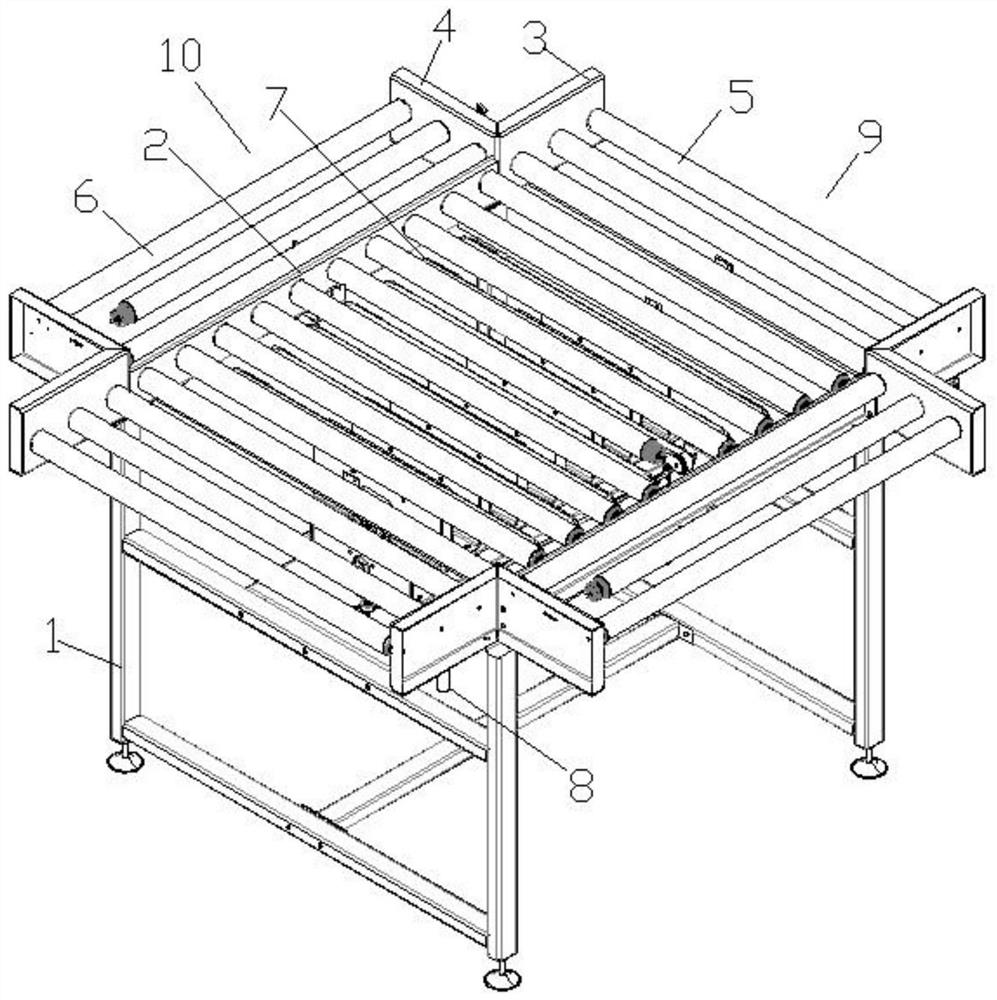
图1为本发明结构示意图;
图2为本发明主视图;
图3为本发明侧视图;
图4为图3中A处放大示意图;
图5为主动辊示意图;
图6为升降驱动机构示意图;
具体实施方式
下面结合附图以实施例对本发明作进一步说明。
本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
实施例,如图1-6所示一种多向输送机,一种多向输送机,包括输送架1、设在所述输送架1上的机架2、设在所述机架2端部的第一转角架3、和所述第一转角架3垂直连接的第二转角架4、间隔设在所述机架2上以及相对的所述第一转角架3之间的第一滚筒5、间隔设在相对的所述第二转角架4之间的第二滚筒6、多个可穿过相邻所述第一滚筒5间隙的中间输送机构7、用于驱动所述中间输送机构7升降的升降驱动机构8,相对的所述第一转角架3之间形成有第一通道9,相对的所述第二转角架4之间形成有第二通道10,优选的,本实施例的第一通道9的水平高度低于第二通道10的水平高度,当货物从第一通道9进入时,可通过中间输送机构7提升货物至和第二通道10相同的高度,将货物送入第二通道10并通过第二滚筒6进行输送,从而改变货物的输送方向,或者货物可保持原来的方向沿第一通道9由第一滚筒5继续输送;当货物从第二通道10进入时,可通过中间输送机构7以及第二滚筒6保持原来的方向沿第二通道10继续输送,或者通过中间输送机构7将货物降低至和第一通道9相同的高度,由第一滚筒5进行输送,从而改变货物的输送方向,本发明通过设置中间输送机构7,实现了多货物的多方向输送,提高工作效率。
进一步的,所述中间输送机构7包括框架701、多组镜像设在所述框架701上的第一机身板702和第二机身板706、贯穿所述第一机身板702和所述第二机身板706的主动辊703、固接在所述第一机身板702和所述第二机身板706上用于支撑所述主动辊703两端的附板704、用于驱动所述主动辊703旋转的旋转驱动部705、设在所述第一机身板702和所述第二机身板706顶部之间的悬挂板707、通过安装板708连接在所述悬挂板707两端的第一改向轮709、连接所述第一改向轮709以及所述主动辊703的片基带710,优选的,本实施例的主动辊703和附板704转动连接,悬挂板707可穿过相邻第一滚筒5之间的间隙,旋转驱动部705包括旋转电机70501、设在所述旋转电机70501输出轴上的主动链轮70502、设在主动辊703上的从动链轮70503、连接主动链轮70502和从动链轮70503的链条70504,通过旋转驱动部705驱动主动辊703旋转,使带动片基带710沿着第一改向轮709以及主动辊703移动,实现对货物的运输。
进一步的,为了使片基带710始终保持绷紧状态,便于对货物的输送,所述第一机身板702和所述第二机身板706之间对称设有第二改向轮711。
进一步的,所述主动辊703包括杆体70301、对应所述第一机身板702和所述第二机身板706设在所述杆体70301上的环形凸起70302,所述片基带710和所述环形凸起70302接触。所述第一机身板702和所述第二机身板706均开设有用于所述主动辊703通过的通孔712,所述通孔712为U形。所述通孔712和所述杆体70301之间具有间隙713。
进一步的,所述升降驱动机构8包括固接在所述输送架1上的气缸安装板801、用于推动所述框架701的气缸802、用于导向所述框架701直线移动的导向杆803,所述导向杆803和所述气缸安装板801滑动连接,优选的,本实施例的气缸802数量为两个,且对称设置在框架701两侧,导向杆803的数量为四根,且分别设置在框架701的四个顶角。
- 一种具有多向离心输送机构的医疗配送机器人
- 一种具有多向离心输送机构的医疗配送机器人