车辆PID参数的调试方法及车辆
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及车辆技术领域,具体涉及一种车辆PID参数的调试方法及车辆。
背景技术
随着互联网技术的发展和工业技术的进步,无人驾驶车辆越来越普及,其中,对车辆的控制算法的精度需求也随之增加,控制算法也变得越复杂,从而增加了算法参数的调试难度。
多数无人驾驶车辆在纵向控制方面都是采用PID算法进行控制,为了保证车辆的驾驶安全和用户体验感,调试工程师需要对PID算法进行合理科学地调试。传统调试方法是需要调试工程师根据组合好的PID参数对PID架构进行调试,由于需要人工组合PID参数和人工输入PID参数,调试工作比较繁重。另外,人工选中哪组PID参数需要依赖调试工程师在无人驾驶车辆上的体感进行确认,缺乏一个明确的量化指标来指导调试工程师可靠高效地进行调试,因此,传统调试结果不可量化。
发明内容
本发明实施例的一个目的旨在提供一种车辆PID参数的调试方法及车辆,用于解决上述现有技术存在的技术缺陷。
在第一方面,本发明实施例提供一种车辆PID参数的调试方法,包括:
获取速度PID架构在每组速度PID参数下运行的速度响应曲线;
根据多组所述速度响应曲线,选择目标速度响应曲线,并记录所述目标速度响应曲线对应的PID参数为最优速度PID参数,所述目标速度响应曲线的自车车速与目标车速的速度误差收敛在速度稳态误差范围;
当所述速度误差收敛在速度稳态误差范围时,获取距离PID架构在每组距离PID参数下运行的距离响应曲线;
根据多组所述距离响应曲线,选择目标距离响应曲线,并记录所述目标距离响应曲线对应的PID参数为最优距离PID参数,所述目标距离响应曲线的自车距离与目标距离的距离误差收敛在距离稳态误差范围。
可选地,所述获取速度PID架构在每组速度PID参数下运行的速度响应曲线包括:
配置所述距离PID架构输出指定速度补偿值;
以所述指定速度补偿值与所述速度误差作为输入,控制所述速度PID架构在每组所述速度PID参数下运行,以调整车速;
根据调整后的车速与目标车速,生成速度响应曲线。
可选地,所述指定速度补偿值为0。
可选地,所述根据多组所述速度响应曲线,选择目标速度响应曲线包括:
确定每组所述速度响应曲线的速度峰值、速度峰值响应时间及速度稳定时间;
分别对每组所述速度峰值、速度峰值响应时间及速度稳定时间作归一化处理,依次得到第一归一值、第二归一值及第三归一值;
根据所述第一归一值与第一权重系数、所述第二归一值与第二权重系数及所述第三归一值与第三权重系数,计算所述速度响应曲线的速度加权和;
根据多个所述速度加权和,选择目标速度响应曲线。
可选地,对每组所述速度峰值作归一化处理,得到第一归一值包括:
确定所述速度峰值与所述目标车速的峰速差值及所述峰速差值的绝对值;
根据双曲正切函数,对所述峰速差值的绝对值作归一化处理,得到第一归一值,所述第一归一值与所述峰速差值的绝对值呈负相关关系。
可选地,所述根据多个所述速度加权和,选择目标速度响应曲线包括:
在多个所述速度加权和中搜索出最大速度加权和;
选择所述最大速度加权和对应的速度响应曲线作为目标速度响应曲线。
可选地,所述获取距离PID架构在每组距离PID参数下运行的距离响应曲线包括:
确定安全距离,并将所述距离误差与所述安全距离进行相加,得到距离输入值;
以所述距离输入值作为输入,控制所述距离PID架构在每组所述距离PID参数下运行,以使所述距离PID架构输出速度补偿值;
以所述速度补偿值与所述速度误差作为输入,控制所述速度PID架构在所述最优速度PID参数下运行,以调整自车距离;
根据调整后的自车距离与目标距离,生成距离响应曲线。
可选地,所述根据多组所述距离响应曲线,选择目标距离响应曲线包括:
确定每组所述距离响应曲线的距离峰值、距离峰值响应时间及距离稳定时间;
分别对每组所述距离峰值、距离峰值响应时间及距离稳定时间作归一化处理,依次得到第四归一值、第五归一值及第六归一值;
根据每组所述第四归一值与第四权重系数、所述第五归一值与第五权重系数及所述第六归一值与第六权重系数,计算每组所述距离响应曲线的距离加权和;
根据多个所述距离加权和,选择目标距离响应曲线。
可选地,所述根据多个所述加距离权和,选择目标距离响应曲线包括:
在多个所述距离加权和中搜索出最大距离加权和;
选择所述最大距离加权和对应的距离响应曲线作为目标距离响应曲线。
在第二方面,本发明实施例提供一种车辆,包括:
至少一个处理器;以及,
与所述至少一个处理器通信连接的存储器;其中,
所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的车辆PID参数的调试方法。
在本发明实施例提供的车辆PID参数的调试方法中,获取速度PID架构在每组速度PID参数下运行的速度响应曲线,根据多组速度响应曲线,选择目标速度响应曲线,并记录目标速度响应曲线对应的PID参数为最优速度PID参数,目标速度响应曲线的自车车速与目标车速的速度误差收敛在速度稳态误差范围,当速度误差收敛在速度稳态误差范围时,获取距离PID架构在每组距离PID参数下运行的距离响应曲线,根据多组距离响应曲线,选择目标距离响应曲线,并记录目标距离响应曲线对应的PID参数为最优距离PID参数,目标距离响应曲线的自车距离与目标距离的距离误差收敛在距离稳态误差范围,一方面,本实施例无需人工手动组合和输入PID参数,便可在给定的多组PID参数下自动输入,依据速度/距离响应曲线进行评估每组PID参数下的调试结果,并依据调试结果自动选中和记录最优PID参数,因此,在调试过程中全程自动化,无需人工参与,有利于提高调试效率。另一方面,本实施例可依据速度/距离响应曲线来量化表示PID架构在每组PID参数下的调试结果,有利于提高PID算法的可靠性和精确性。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
图1为本发明实施例提供的一种PID调试系统的架构示意图;
图2为本发明实施例提供的应用如图1所示的PID调试系统的应用场景示意图;
图3为本发明实施例提供的一种车辆PID参数的调试方法的流程示意图;
图4为图3所示的S31的流程示意图;
图5为图3所示的S32的流程示意图;
图6为图3所示的S33的流程示意图;
图7为图3所示的S34的流程示意图;
图8为本发明实施例提供的一种车辆的电路结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,如果不冲突,本发明实施例中的各个特征可以相互结合,均在本发明的保护范围之内。另外,虽然在装置示意图中进行了功能模块划分,在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于装置中的模块划分,或流程图中的顺序执行所示出或描述的步骤。再者,本发明所采用的“第一”、“第二”、“第三”等字样并不对数据和执行次序进行限定,仅是对功能和作用基本相同的相同项或相似项进行区分。
本发明实施例提供的车辆可适用任意合适驾驶场景,诸如无人驾驶场景或者自适应巡航场景等,其中,车辆可被配置任意合适PID调试系统以执行下文涉及的车辆PID参数的调试方法。
请参阅图1,PID调试系统100用于调试自车车辆200与前车车辆300之间的速度与距离,在一些实施例中,PID调试系统100可调试自车车辆200的自车车速V1与前车车辆300的前车车速V2相同,另外,在自车车速V1与前车车速V2同步时,PID调试系统100还可调试自车车辆200与前车车辆300始终保持安全距离。
请参阅图2,PID调试系统100包括距离PID架构11、速度PID架构12及执行机构13。
距离PID架构11用于促使自车车辆200相对前车车辆300保持在安全距离之处,其中,距离PID架构11以距离误差ΔSw与安全距离ΔSa作为输入,其中,将距离误差ΔSw与安全距离ΔSa进行相加,得到距离输入值ΔSz,以距离输入值ΔSz输入距离PID架构11,距离PID架构11根据给定的距离PID参数,输出速度补偿值ΔVb。其中,所述距离误差ΔSw=S
速度PID架构12用于促使自车车辆200的自车车速V1与前车车辆300的前车车速V2相同,其中,速度PID架构12以速度补偿值ΔVb与速度误差ΔVw作为输入,其中,将速度补偿值ΔVb与速度误差ΔVw进行相加,得到速度输入值ΔVz,以速度输入值ΔVz输入速度PID架构12,速度PID架构12根据给定的速度PID参数,输出加速度补偿值Δa,速度误差ΔVw为自车车速减去目标车速,其中,在一些实施例中,目标车速可以被视为前车车辆的前车车速。
执行机构13用于根据加速度补偿值Δa,调整自车车辆的自车车速,例如,增加油门或者进行刹车等动作。
本实施例提供的PID调试系统100的工作原理如下:
为了使得上述两车同速和保持安全距离,本实施例可先调试自车车辆200与前车车辆300保持同速后,再调试自车车辆200与前车车辆300保持安全距离,亦即,本实施例先调试速度PID架构12,再调试距离PID架构11。
在调试速度PID架构12之前,先配置距离PID架构11输出的速度补偿值ΔVb为0,接着,依序向速度PID架构12输入给定的多组速度PID参数,得到多组速度响应曲线。然后,根据速度峰值、速度峰值响应时间及速度稳定时间,在多组速度响应曲线中挑选目标速度响应曲线,并将目标速度响应曲线对应的速度PID参数进行记录,从而完成速度PID架构的调试工作。
举例而言,假设自车车速V1=5m/s,前车车速V2=10m/s,安全距离ΔSa=5m。采用上述方式调试速度PID架构12,会最终将V2-V1=ΔVw收敛至0,亦即V1约等于V2。在将V1调整等于V2时,自车车辆200已距离前车车辆300有20米远了,接着再调试距离PID架构。
调试距离PID架构时,本实施例依序向距离PID架构11输入给定的多组距离PID参数,得到多组距离响应曲线。然后,根据距离峰值、距离峰值响应时间及距离稳定时间,在多组距离响应曲线中挑选目标距离响应曲线,并将目标距离响应曲线对应的距离PID参数进行记录,从而完成距离PID架构的调试工作。
举例而言,如前所述,本实施例为速度PID架构12配置目标速度响应曲线对应的速度PID参数。并且,在距离PID架构11与速度PID架构12的共同作用下,当自车车辆200的自车车速由10m/s加速到15m/s时,此加速过程会补偿自车车辆200与前车车辆300的距离,使得自车车辆200不断地逼近安全距离之处。
接着,在距离PID架构11与速度PID架构12的共同作用下,自车车辆200开始从15m/s降速到10m/s,同理,在降速过程中也会补偿自车车辆200与前车车辆300的距离。
再接着,在距离PID架构11与速度PID架构12的共同作用下,当自车车辆200的自车车速由10m/s加速到15m/s时,此加速过程会补偿自车车辆200与前车车辆300的距离。
至此,自车车辆不断地遵循“10m/s--15m/s--10m/s--15m/s……”进行来回波动,在各个波动过程中,自车车辆200会不断地缩短与前车车辆300的距离,最终,自车车辆200与前车车辆300以相同车速,保持相距安全距离ΔSa。如图1所示,自车车辆200与前车车辆300在t1时刻和t2时刻都是以相同车速,始终保持相距安全距离ΔSa。
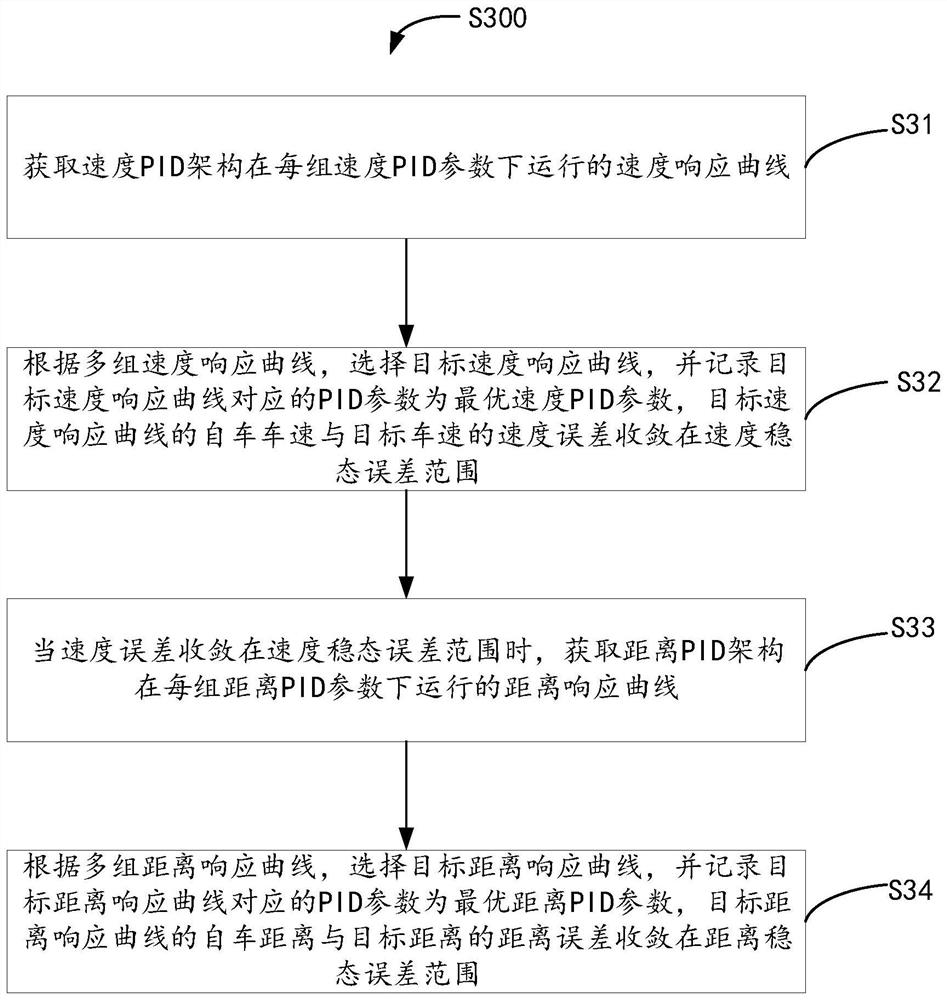
作为本发明实施例另一方面,本发明实施例提供一种车辆PID参数的调试方法。请参阅图3,车辆PID参数的调试方法S300包括:
S31、获取速度PID架构在每组速度PID参数下运行的速度响应曲线;
作为示例但非限定的是,速度响应曲线用于表示自车车速随着时间相对目标车速的变化,其中,目标车速可为前车的前车车速或者用户自定义的车速。
速度PID架构在每组速度PID参数下进行运行时,PID调试系统根据运行结果,都会生成相应的速度响应曲线,举例而言,给定以下四组速度PID参数,分别为[PV1,IV1,DV1]、[PV2,IV2,DV2]、[PV3,IV3,DV3]及[PV4,IV4,DV4],速度PID架构在速度PID参数[PV1,IV1,DV1]、[PV2,IV2,DV2]、[PV3,IV3,DV3]及[PV4,IV4,DV4]下进行运行时,分别得到速度响应曲线LV1、速度响应曲线LV2、速度响应曲线LV3及速度响应曲线LV4。
S32、根据多组速度响应曲线,选择目标速度响应曲线,并记录目标速度响应曲线对应的PID参数为最优速度PID参数,目标速度响应曲线的自车车速与目标车速的速度误差收敛在速度稳态误差范围;
在本实施例中,速度误差为目标车速减去自车车速的差值,速度稳态误差范围可由用户自定义,例如,速度稳态误差范围为0或者[-1,1]等,速度误差落在速度稳态误差范围内时,则可视自车车速等于目标车速,从而满足调试目的。
通常,不同速度响应曲线在速度峰值、速度峰值响应时间及速度稳定时间都可能存在差异,设计者可以根据业务需求,为上述速度峰值、速度峰值响应时间及速度稳定时间配置不同权值,以便能够在多组速度响应曲线中,选择出更加可靠精准和满足业务需求的目标速度响应曲线。举例而言,如前所述,假设速度PID架构在第三组速度PID参数运行下的速度响应曲线LV3是目标速度响应曲线,则速度PID参数[PV3,IV3,DV3]为最优速度PID参数。
S33、当速度误差收敛在速度稳态误差范围时,获取距离PID架构在每组距离PID参数下运行的距离响应曲线;
如前所述,本实施例可先调试自车车辆与前车车辆两者的车速同步,后再调试距离PID架构。当速度误差收敛在速度稳态误差范围时,则说明自车车辆与前车车辆两者的车速已同步,于是,PID调试系统便给距离PID架构依序配置每组距离PID参数,使得距离PID架构在每组距离PID参数下进行运行,PID调试系统根据运行结果,都会生成相应的距离响应曲线。
举例而言,给定以下四组距离PID参数,分别为[PS1,IS1,DS1]、[PS2,IS2,DS2]、[PS3,IS3,DS3]及[PS4,IS4,DS4],速度PID架构在速度PID参数[PS1,IS1,DS1]、[PS2,IS2,DS2]、[PS3,IS3,DS3]及[PS4,IS4,DS4]下进行运行时,分别得到速度响应曲线LS1、速度响应曲线LS2、速度响应曲线LS3及速度响应曲线LS4。
S34、根据多组距离响应曲线,选择目标距离响应曲线,并记录目标距离响应曲线对应的PID参数为最优距离PID参数,目标距离响应曲线的自车距离与目标距离的距离误差收敛在距离稳态误差范围。
在本实施例中,距离误差为目标距离减去自车距离的差值,距离稳态误差范围可由用户自定义,例如,距离稳态误差范围为0或者[-1,1]等,距离误差落在距离稳态误差范围内时,则可视自车车辆与前车车辆的距离保持为安全距离,从而满足调试目的。
通常,不同距离响应曲线在距离峰值、距离峰值响应时间及距离稳定时间都可能存在差异,设计者可以根据业务需求,为上述距离峰值、距离峰值响应时间及距离稳定时间配置不同权值,以便能够在多组距离响应曲线中,选择出更加可靠精准和满足业务需求的目标距离响应曲线。举例而言,如前所述,假设距离PID架构在第三组距离PID参数运行下的距离响应曲线LS3是目标距离响应曲线,则距离PID参数[PS3,IS3,DS3]为最优距离PID参数。
总体而言,一方面,本实施例无需人工手动组合和输入PID参数,便可在给定的多组PID参数下自动输入,依据速度/距离响应曲线进行评估每组PID参数下的调试结果,并依据调试结果自动选中和记录最优PID参数,因此,在调试过程中全程自动化,无需人工参与,有利于提高调试效率。另一方面,本实施例可依据速度/距离响应曲线来量化表示PID架构在每组PID参数下的调试结果,有利于提高PID算法的可靠性和精确性。
在一些实施例中,请参阅图4,S31包括:
S311、配置距离PID架构输出指定速度补偿值;
S312、以指定速度补偿值与速度误差作为输入,控制速度PID架构在每组速度PID参数下运行,以调整车速;
S313、根据调整后的车速与目标车速,生成速度响应曲线。
在一些实施例中,指定速度补偿值为0,举例而言,请结合图2,在调试速度PID架构时,PID调试系统配置距离PID架构输出的指定速度补偿值为0,于是,速度PID架构可以不断地以指定速度补偿值0与速度误差ΔVw作为输入,在每组速度PID参数下运行,以调整车速,因此,本实施例能够有效和快速地调节速度PID架构。
在一些实施例中,请参阅图5,S32包括:
S321、确定每组速度响应曲线的速度峰值、速度峰值响应时间及速度稳定时间;
S322、分别对每组速度峰值、速度峰值响应时间及速度稳定时间作归一化处理,依次得到第一归一值、第二归一值及第三归一值;
S323、根据第一归一值与第一权重系数、第二归一值与第二权重系数及第三归一值与第三权重系数,计算速度响应曲线的速度加权和;
S324、根据多个速度加权和,选择目标速度响应曲线。
作为示例但非限定的是,速度峰值为速度PID架构在每组速度PID参数下运行时位于最高车速点时的自车车速,速度峰值响应时间为达到速度峰值的时间,速度稳定时间为速度误差首次收敛在速度稳态误差范围的时间。
在S321中,PID调试系统逐点比对每个时间点的自车车速,从而遍历出速度峰值Vf,并且记录所述速度峰值Vf的时间作为速度峰值响应时间Vt。另外,PID调试系统将每个时间点的自车车速与目标车速进行相减,得到速度误差,并判断速度误差是否落在速度稳态误差范围,若落在,则记录此时的自车车速对应的时间点Vh。
在S322中,为了囊括速度峰值、速度峰值响应时间及速度稳定时间三者作为评价要素,以选择目标速度响应曲线,本实施例需要分别对每组速度峰值、速度峰值响应时间及速度稳定时间作归一化处理,可分别得到第一归一值η1、第二归一值η2及第三归一值η3。
在S323中,为了能够选择出更加可靠和精准地速度PID参数,本实施例可以根据权重算法,选择目标速度响应曲线,举例而言,PID调试系统根据以下式子,计算每个速度响应曲线的速度加权和:
φ=α*η1+β*η2+γ*η3
1=α+β+γ
其中,α为第一权重系数,β为第二权重系数,γ为第三权重系数,φ为速度加权和。
在S324中,PID调试系统依序执行S323,可得到多个速度加权和[φ1,φ2,φ3,φ4],PID调试系统在多个速度加权和[φ1,φ2,φ3,φ4]中搜索出最大速度加权和,选择最大速度加权和对应的速度响应曲线作为目标速度响应曲线,举例而言,假设速度加权和φ3为最大速度加权和,则选择速度加权和φ3对应的速度响应曲线LV3作为目标速度响应曲线。
由于速度峰值、速度峰值响应时间及速度稳定时间都对车速调节起到相应的作用,例如,速度峰值可影响到自车车速是否能够有效地逼近目标车速,速度峰值响应时间可影响到自车车速逼近目标车速的快慢,速度稳定时间可影响到自车车速收敛至目标车速所需的时间,本实施例能够充分考虑到速度峰值、速度峰值响应时间及速度稳定时间,并根据业务需求给上述三个要素分别匹配相应权重系数,以便PID调试系统能够可靠高效精准地得到最优速度PID参数。
在一些实施例中,对每组速度峰值作归一化处理,得到第一归一值时,PID调试系统确定速度峰值与目标车速的峰速差值及峰速差值的绝对值,根据双曲正切函数,对峰速差值的绝对值作归一化处理,得到第一归一值,第一归一值与峰速差值的绝对值呈负相关关系。
由于速度峰值减去目标车速所得到的峰速差值越大,其对应的速度响应曲线越不符合期望,峰速差值越小,其对应的速度响应曲线越符合期望,因此,本实施例希望峰速差值越大,第一归一值就越小,峰速差值越小,第一归一值就越大,因此,在一些实施例,PID调试系统根据以下式子,对峰速差值的绝对值作归一化处理:
ρ=Vf-Vm
η1=tanh(-|ρ|)+1
其中,Vm为目标车速,ρ为峰速差值。
在一些实施例中,分别对每组速度峰值响应时间及速度稳定时间作归一化处理时,PID调试系统根据双曲正切函数,对每组速度峰值响应时间及速度稳定时间作归一化处理,依次得到第二归一值及第三归一值,第二归一值与速度峰值响应时间呈正相关关系,第三归一值与速度稳定时间呈正相关关系,举例而言,
η2=tanh(Vt)
η3=tanh(Vh)
采用上述作法,本实施例能够有效地得到第一归一值、第二归一值及第三归一值。
在一些实施例中,获取距离PID架构在每组距离PID参数下运行的距离响应曲线时,请参阅图6,S33包括:
S331、确定安全距离,并将距离误差与安全距离进行相加,得到距离输入值;
S332、以距离输入值作为输入,控制距离PID架构在每组距离PID参数下运行,以使距离PID架构输出速度补偿值;
S333、以速度补偿值与速度误差作为输入,控制速度PID架构在最优速度PID参数下运行,以调整自车距离;
S334、根据调整后的自车距离与目标距离,生成距离响应曲线。
采用此种作法,本实施例能够有效地得到距离响应曲线。
在一些实施例中,根据多组距离响应曲线,选择目标距离响应曲线时,请参阅图7,S34包括:
S341、确定每组距离响应曲线的距离峰值、距离峰值响应时间及距离稳定时间;
S342、分别对每组距离峰值、距离峰值响应时间及距离稳定时间作归一化处理,依次得到第四归一值、第五归一值及第六归一值;
S343、根据每组第四归一值与第四权重系数、第五归一值与第五权重系数及第六归一值与第六权重系数,计算每组距离响应曲线的距离加权和;
S344、根据多个距离加权和,选择目标距离响应曲线。
作为示例但非限定的是,距离峰值为距离PID架构在每组距离PID参数下运行时与安全距离的差值最小时的自车距离,距离峰值响应时间为达到距离峰值的时间,距离稳定时间为距离误差首次收敛在距离稳态误差范围的时间。
在S341中,PID调试系统逐点比对每个时间点的自车距离,从而遍历出距离峰值Sf,并且记录所述距离峰值Sf的时间作为距离峰值响应时间St。另外,PID调试系统将每个时间点的自车距离与目标距离进行相减,得到距离误差,并判断距离误差是否落在距离稳态误差范围,若落在,则记录此时的自车距离对应的时间点Sh。
在S342中,为了囊括距离峰值、距离峰值响应时间及距离稳定时间三者作为评价要素,以选择目标距离响应曲线,本实施例需要分别对每组距离峰值、距离峰值响应时间及距离稳定时间作归一化处理,可分别得到第四归一值η4、第五归一值η5及第六归一值η6。
在S343中,为了能够选择出更加可靠和精准地距离PID参数,本实施例可以根据权重算法,选择目标距离响应曲线,举例而言,PID调试系统根据以下式子,计算每个距离响应曲线的距离加权和:
λ=δ*η4+ψ*η5+τ*η6
1=δ+ψ+τ
其中,δ为第四权重系数,ψ为第五权重系数,τ为第六权重系数,λ为距离加权和。
在S344中,PID调试系统依序执行S343,可得到多个距离加权和[λ1,λ2,λ3,λ4],PID调试系统在多个距离加权和[λ1,λ2,λ3,λ4]中搜索出最大距离加权和,选择最大距离加权和对应的距离响应曲线作为目标距离响应曲线,举例而言,假设距离加权和λ3为最大距离加权和,则选择距离加权和λ3对应的距离响应曲线LS3作为目标距离响应曲线。
由于距离峰值、距离峰值响应时间及距离稳定时间都对车距调节起到相应的作用,例如,距离峰值可影响到自车距离是否能够有效地逼近安全距离,距离峰值响应时间可影响到自车距离逼近安全距离的快慢,距离稳定时间可影响到自车距离收敛至安全距离所需的时间,本实施例能够充分考虑到距离峰值、距离峰值响应时间及距离稳定时间,并根据业务需求给上述三个要素分别匹配相应权重系数,以便PID调试系统能够可靠高效精准地得到最优距离PID参数。
在一些实施例中,对每组距离峰值作归一化处理,得到第四归一值时,PID调试系统确定距离峰值与安全距离的距离峰差及距离峰差的绝对值,根据双曲正切函数,对距离峰差的绝对值作归一化处理,得到第一归一值,第一归一值与距离峰差的绝对值呈负相关关系。
由于距离峰值减去安全距离所得到的距离峰差越大,其对应的距离响应曲线越不符合期望,距离峰差越小,其对应的距离响应曲线越符合期望,因此,本实施例希望距离峰差越大,第四归一值就越小,距离峰差越小,第四归一值就越大,因此,在一些实施例,PID调试系统根据以下式子,对距离峰差的绝对值作归一化处理:
χ=Sf-ΔSa
η4=tanh(-|χ|)+1
其中,χ为距离峰差。
在一些实施例中,分别对每组距离峰值响应时间及速度稳定时间作归一化处理时,PI调试系统根据双曲正切函数,对每组距离峰值响应时间及距离稳定时间作归一化处理,依次得到第五归一值及第六归一值,第五归一值与距离峰值响应时间呈正相关关系,第六归一值与距离稳定时间呈正相关关系,举例而言,
η5=tanh(St)
η6=tanh(Sh)
采用上述作法,本实施例能够有效地得到第五归一值、第六归一值及第三归一值。
需要说明的是,在上述各个实施方式中,上述各步骤之间并不必然存在一定的先后顺序,本领域普通技术人员,根据本发明实施方式的描述可以理解,不同实施方式中,上述各步骤可以有不同的执行顺序,亦即,可以并行执行,亦可以交换执行等等。
请参阅图8,图8为本发明实施例提供的一种车辆的电路结构示意图。如图8所示,车辆800包括一个或多个处理器81以及存储器82。其中,图8中以一个处理器81为例。
处理器81和存储器82可以通过总线或者其他方式连接,图8中以通过总线连接为例。
存储器82作为一种非易失性计算机可读存储介质,可用于存储非易失性软件程序、非易失性计算机可执行程序以及模块,如本发明实施例中的车辆PID参数的调试方法对应的程序指令/模块。处理器81通过运行存储在存储器82中的非易失性软件程序、指令以及模块,从而实现上述方法实施例提供的车辆PID参数的调试方法的功能。
存储器82可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。在一些实施例中,存储器82可选包括相对于处理器81远程设置的存储器,这些远程存储器可以通过网络连接至处理器81。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
所述程序指令/模块存储在所述存储器82中,当被所述一个或者多个处理器81执行时,执行上述任意方法实施例中的车辆PID参数的调试方法。
本发明实施例还提供了一种非易失性计算机存储介质,所述计算机存储介质存储有计算机可执行指令,该计算机可执行指令被一个或多个处理器执行,例如图8中的一个处理器81,可使得上述一个或多个处理器可执行上述任意方法实施例中的车辆PID参数的调试方法。
本发明实施例还提供了一种计算机程序产品,所述计算机程序产品包括存储在非易失性计算机可读存储介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被车辆执行时,使所述车辆执行任一项所述的车辆PID参数的调试方法。
以上所描述的装置或设备实施例仅仅是示意性的,其中所述作为分离部件说明的单元模块可以是或者也可以不是物理上分开的,作为模块单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络模块单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对相关技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如ROM/RAM、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所述的方法。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;在本发明的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本发明的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 车辆PID参数的调试方法及车辆
- 轨道车辆调试系统、轨道车辆以及轨道车辆调试方法