一种海底底质与水体定时取样系统及方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及海洋调查技术领域,具体涉及一种海底底质与水体定时取样系统及方法。
背景技术
海洋底质沉积物是指因各种海洋沉积作用所形成的海底沉积物的总称,深海底质沉积物及其周围水体样品的采样与研究对于海洋地质学、海洋生物学、古气候学等都具有极其重要的意义。目前,海底底质沉积物的采样通常使用的工具有地质拖网、电视抓斗、柱状取样器和海底钻机等;海水水体采样工具则以各类型船载或者需搭载于潜器进行作业的设备为主。以上这些底质和水体采样装备基本上都具有体积大、重量大、成本高、布放要求高的特点,在海上取样作业时需要全程连接钢缆,并借助调查船上的A型架和绞车系统进行布放和回收操作。我国目前所进行的大洋调查任务中,取样作业区域一般位于远离大陆的西南印度洋、大西洋、太平洋等较远海域,在深海大洋的海底进行底质沉积物取样是一项十分昂贵的科研与调查活动。此外,当在大范围海底沉积物目标区域内进行多站位取样任务时,利用单艘调查船无法实现站位之间布放和回收的并行工作模式,因此需要耗费大量昂贵的船时来完成整体取样任务。
发明内容
针对海底沉积物取样成本高、布放难度大、占据船时多等问题,本发明提供了一种海底底质与水体定时取样系统与方法。
为实现上述目的,一方面,本发明提供一种海底底质与水体定时取样系统,该系统基于模块化设计思想,具体包括释放回收模块、底质收集模块、系统控制模块以及机械框架平台模块;所述释放回收模块包括浮力单元、定时释放器、载重块和卫星定位信标;所述浮力单元和卫星定位信标安装在机械框架平台模块顶部位置,所述定时释放器安装在机械框架平台模块底部位置,所述载重块连接在定时释放器上;所述底质收集模块和系统控制模块安装在机械框架平台模块上,底质收集模块通过样品吸取齿轮泵以及采样管吸取固体沉积物及水体样品,并且样品吸取齿轮泵安装在系统控制模块内,系统控制模块用于控制样品吸取齿轮泵工作并设定定时释放器的工作时间,当达到设定时间时,定时释放器与载重块断开连接,在浮力单元的作用下,系统上浮至海面,通过卫星定位信标获得系统回收时所处水面位置信息。
进一步地,所述浮力单元用于提供系统的正浮力;所述载重块通过凯夫拉绳与所述释放器为可拆卸连接,用于提供系统下沉的重力。
进一步地,所述底质收集模块包括金属采样管、塑料软管、固体沉积物收集盒、活塞定量取样腔体和样品吸取齿轮泵;所述金属采样管末端呈弧线状,用于支撑系统平衡并可插入海底沉积物覆盖层内部;所述固体沉积物收集盒用于贮存取样系统吸取到的符合粒径要求的沉积物样品;所述活塞定量取样腔体用于贮存系统吸取到的水体样品;所述样品吸取齿轮泵用于吸取固体沉积物及水体样品的混合物,吸取的混合物先经过固体沉积物收集盒,过滤后留下一定粒径的沉积物样品,剩下的水体样品被输送到活塞定量取样腔体内;所述塑料软管用于所述样品吸取齿轮泵与所述金属采样管、固体沉积物收集盒、活塞定量取样腔体之间的相互连接及样品传输。
进一步地,所述系统控制模块包括泵阀充油腔体、控制电路板、锂电池;所述控制电路板、锂电池及样品吸取齿轮泵均置于泵阀充油腔体内部;泵阀充油腔体通过外置水密接插件与控制计算机连接,用于获取或设置用户配置的系统参数;所述控制电路板用于控制样品吸取齿轮泵电机的运转工作;所述锂电池用于提供系统控制模块及样品吸取齿轮泵电机运转工作的能量。
进一步地,所述机械框架平台模块包括铝合金主体框架和顶部吊环;所述铝合金主体框架用于固定集成取样系统中其他模块各部件,并为进一步搭载其他外置传感器预留了空间,以提高本取样系统的扩展性;所述顶部吊环用于取样系统布放回收时提供吊点支撑。
进一步地,所述释放回收模块在实际使用过程中,加装信号旗和深水耐压光标,与卫星定位信标配合使用,用于进一步提高取样系统的全天候回收成功率。
进一步地,所述底质收集模块的金属采样管管口安装有滤网罩;所述底质收集模块的固体沉积物收集盒中放入双圈定性滤纸,用于获取符合粒径要求的沉积物样品。
另一方面,本发明还提供了一种海底底质与水体定时取样方法,包括以下步骤:
(1)系统参数配置:根据取样系统总质量和浮力单元浮力参数,计算并设置样品吸取齿轮泵启动时间T
(2)系统布放:检查取样系统参数配置无误后,开启卫星定位信标,然后将船上侧舷吊车与系统顶部吊环相连并吊离甲板,待取样系统底部接触海面时投放,确保其以正常姿态入水;
(3)样品采集:取样系统根据配置参数吸取海底固体沉积物及上覆海水样品,并将符合粒径要求的沉积物样品贮存于固体沉积物收集盒,上覆海水样品贮存于活塞定量取样腔体内;
(4)系统回收:定时释放器在到达设定的释放延时时间T
(5)样品取样:关闭定时释放器;打开固体沉积物收集盒,并从滤纸上取出沉积物样品;打开活塞定量取样腔体,取出水体样品;对固体沉积物收集盒、活塞定量取样腔体、金属采样管、塑料软管用淡水进行清洗。
进一步地,所述步骤(1)具体包括如下步骤:
(1-1)设取样系统不含载重块在水中重力为G、取样系统浮力单元采用浮球,其浮力为F,令取样系统在水下总重力与其净浮力大小相等,根据下式计算得到取样系统对应的载重块数量N
其中,G
(1-2)设工作海区水深值为D、取样系统包含载重块时总重力为G
其中,ρ表示工作海区海水密度值,S表示浮球表面积;根据下式估算得到取样系统从海底上浮至海面所需时间T
其中,F
(1-3)为确保样品吸取齿轮泵在取样系统完全插入海底沉积物覆盖层之后才开始工作,样品吸取齿轮泵启动时间T
T
其中T
(1-4)根据实际海底沉积物样品吸取需求选定样品吸取齿轮泵运行时间T
(1-5)为确保取样系统在样品吸取齿轮泵工作结束后才开始释放载重块并上浮,定时释放器延时时间T
T
(1-6)检测释放器工作电压状态,并设置定时释放器延时时间T
本发明的有益效果:
(1)采用模块化设计思想,取样系统整体体积小、重量轻、成本低、布放回收方式简单、作业效率高,并可进一步集成搭载自容式传感器开展同步水体观测;
(2)采用可配置时间参数来自由控制系统吸取样品的工作时长和抛载上浮时间,提高了系统作业过程的灵活性;
(3)可根据工作区域海底沉积物底质情况预先调节载重块重量,提高了系统对不同海底底质的适应能力;
(4)支持同时对海底沉积物及其上覆海水进行取样作业,提高了吸取样品的多样性和完整性;
(5)可通过多套系统阵列化布放的方式,实现大范围海底沉积物目标区域高效率取样调查。
附图说明
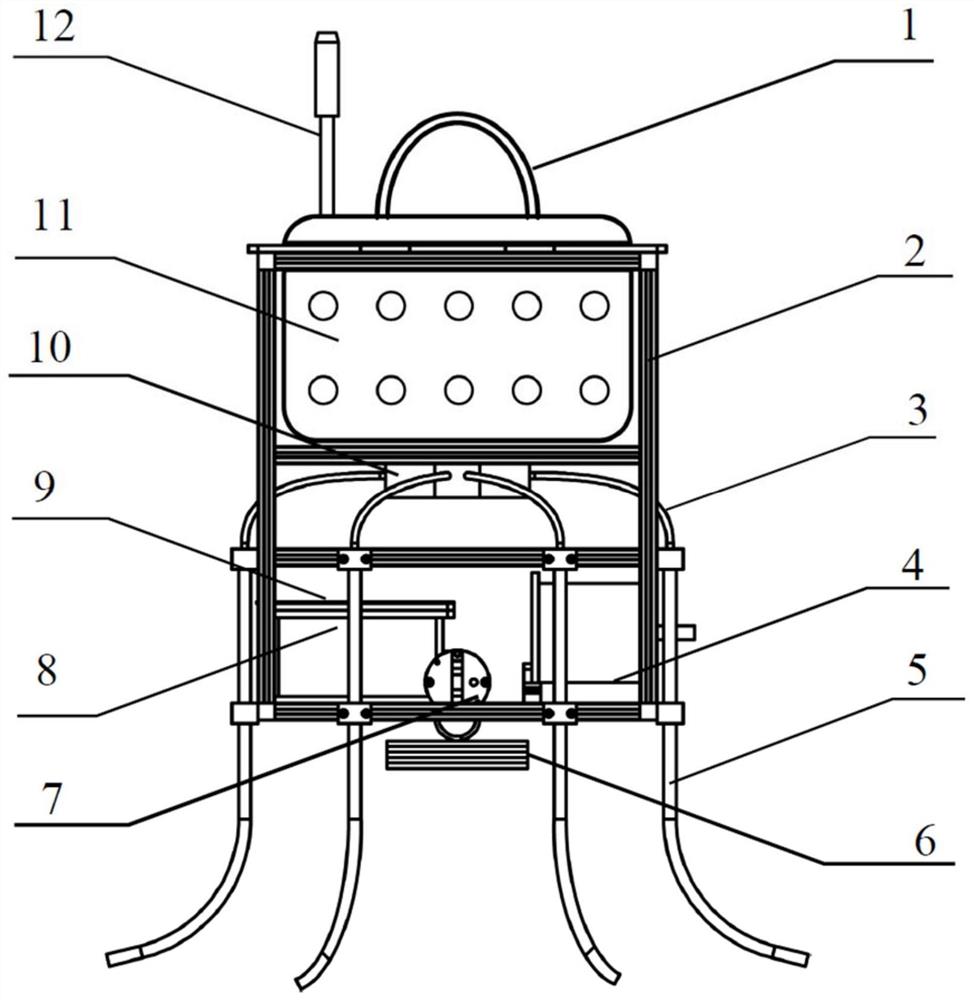
图1为本发明系统整体结构示意图。
图2为本发明方法流程图。
图1中:1顶部吊环、2铝合金主体框架、3塑料软管、4活塞定量取样腔体、5采样管、6载重块、7定时释放器、8样品吸取齿轮泵、9泵阀充油腔体、10固体沉积物收集盒,11浮力单元、12卫星定位信标。
具体实施方式
为了更为具体地描述本发明,下面结合附图及具体实施方式对本发明的技术方案进行详细说明。
本发明实施例提供了一种海底底质与水体定时取样系统及方法。
在本发明的第一方面,提供了一种海底底质与水体定时取样系统。
如图1所示,该系统基于模块化设计思想,包括释放回收模块、底质收集模块、系统控制模块以及机械框架平台模块;
其中,释放回收模块包括浮力单元11、定时释放器7、载重块6、卫星定位信标12;浮力单元11用于提供系统的正浮力;所述浮力单元11和卫星定位信标12安装在机械框架平台模块顶部位置,所述定时释放器7安装在机械框架平台模块底部位置,载重块6与定时释放器7通过凯夫拉绳可拆卸连接,用于提供系统下沉的重力;定时释放器7在到达设定时间后与载重块断开连接,促使系统满足上条件;卫星定位信标12在系统布放时即开启,用于提供系统回收时所处水面位置信息;加装信号旗和深水耐压光标,与卫星定位信标12配合使用,用于进一步提高取样系统的全天候回收成功率。
底质收集模块安装在机械框架平台模块上,包括金属采样管5、塑料软管3、固体沉积物收集盒10、活塞定量取样腔体4、样品吸取齿轮泵8;金属采样管5数量为四至八根,其末端呈弧线状,用于支撑系统平衡并可插入海底沉积物覆盖层内部;固体沉积物收集盒10用于贮存取样系统吸取到的符合粒径要求的沉积物样品;活塞定量取样腔体4用于贮存系统吸取到的水体样品;样品吸取齿轮泵8用于吸取固体沉积物及水体样品的混合物,吸取的混合物先经过固体沉积物收集盒10,过滤后留下一定粒径的沉积物样品,剩下的水体样品被输送到活塞定量取样腔体4内;塑料软管3用于述样品吸取齿轮泵8与金属采样管5、固体沉积物收集盒10、活塞定量取样腔体4之间的相互连接及样品传输。
系统控制模块安装在机械框架平台模块上,包括泵阀充油腔体9,其内部放置吸取齿轮泵8以及相关控制电路板、锂电池等部件;所述控制电路板、锂电池及样品吸取齿轮泵均置于泵阀充油腔体内部;泵阀充油腔体9通过外置水密接插件与控制计算机连接,用于获取或设置用户配置的系统参数。所述控制电路板用于控制样品吸取齿轮泵8电机的运转工作;所述锂电池用于提供系统控制模块及样品吸取齿轮泵8电机运转工作的能量。
机械框架平台模块包括铝合金主体框架2和顶部吊环1;铝合金主体框架2用于固定集成本取样系统中其他模块各部件,并为进一步搭载其他外置传感器预留了空间,以提高本取样系统的扩展性;顶部吊环1用于取样系统布放回收时提供吊点支撑。
底质收集模块中金属采样管5的管口选取合适孔径的滤网罩,以防吸取齿轮泵工作时将碎石等硬物吸进金属采样管内部;固体沉积物收集盒10中放入双圈定性滤纸,用于获取粒径大于等于50um的沉积物固体颗粒样品。
在本发明的第二方面,提供了一种海底底质与水体定时取样方法,如图2所示,具体包括以下步骤:
步骤1:系统参数配置
(1-1)取样系统不含载重块在水中重量为20kg,取样系统浮力单元采用浮球,其浮力为25kg,单个载重块对应重量大小为2kg,根据如下公式可计算得到取样系统对应载重块数量为5块。
其中,G
(1-2)工作海区水深值为2000米、取样系统包含载重块时总重力为30kg,浮球直径为530mm,根据下面公式可估算得到取样系统从海面下沉至海底所需时间为75分钟;
其中,ρ表示工作海区海水密度值,S表示浮球表面积;D为工作海区水深值,G
其中,F′表示取样系统净浮力;
(1-3)取样系统从甲板到实际布放入水预估所需时间为20分钟,为确保吸取齿轮泵在取样系统完全插入海底沉积物覆盖层之后才开始工作,根据下式计算,吸取齿轮泵启动时间T
T
其中T
(1-4)选定吸取齿轮泵运行时间30分钟,通过USB转RS485串口数据线将控制计算机与控制仓进行连接,分别设置齿轮泵启动时间和运行时间。
(1-5)为确保取样系统在样品吸取齿轮泵工作结束后才开始释放载重块并上浮,根据下式计算,定时释放器延时时间设置为120分钟。
T
其中,T
(1-6)将定时释放器开关旋转到“ON”状态,通过USB转RS485串口数据线将控制计算机与定时释放器进行连接,利用释放器专用软件检测其工作电压状态,并设置定时释放器延时时间,本发明中使用杭州鸥影科技有限公司开发的深海释放器控制系统专用软件进行设置,但本发明中不限于使用某一型号定时释放器及配套专用软件。
步骤2:系统布放:
检查取样系统参数配置无误后,开启卫星定位信标,然后将船上侧舷吊车与系统顶部吊环相连并吊离甲板,待取样系统底部接触海面时投放,确保其以正常姿态入水。
步骤3:样品采集:
样品吸取齿轮泵在设定的启动时间到达时开启,取样系统开始吸取海底沉积物及上覆海水样品,其中符合粒径要求的沉积物样品贮存于固体沉积物收集盒,上覆海水样品贮存于活塞定量取样腔体内;样品吸取齿轮泵在运行时间后关闭,取样系统停止吸取海底沉积物及上覆海水样品。
步骤4:系统回收:
定时释放器在设定的释放延时时间到达时,自动旋转至释放状态后抛弃载重块,使得取样系统以正浮力自主上浮;当取样系统浮出水面后,其搭载的卫星定位信标将自身位置信息发送至船基手持接收单元;根据位置信息搜寻取样系统并回收。
步骤5:样品取样:
将定时释放器开关旋转到“OFF”状态进行关闭;打开固体沉积物收集盒,并从滤纸上取出沉积物样品;打开活塞定量取样腔体,取出水体样品;对固体沉积物收集盒、活塞定量取样腔体、金属采样管、塑料软管用淡水进行清洗。
以上所述的具体实施方式对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的最优选实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充、等同替换和改进等,均应包含在本发明的保护范围之内。