一种双导柱调节定位数控智能机床
文献发布时间:2024-01-17 01:18:42
技术领域
本发明涉及智能定位机床技术领域,特别涉及一种双导柱调节定位数控智能机床。
背景技术
传统的数控机床定位精度通常依靠加工中心的机床定位系统实现。这种机床定位系统通常采用机床床身、工作台和夹具等机床部件来实现定位,但是这种方法存在优化空间,机床的定位精度依赖于机床床身等部件的刚性,而这种刚性通常会随着长时间的使用和环境变化而降低,加工中心定位精度受到环境因素的影响较大,比如温度、湿度等因素会影响机床部件的热膨胀系数,从而导致机床定位精度产生变化。给予以上因素,数控智能机床需要具有调节定位的功能以满足机件加工的需求。
公告号为CN107617879B的中国发明专利公开了精密定位的智能化流水线机床,包括流水线框架,流水线框架上固定安装有载具,流水线框架上活动安装有动模,流水线框架上活动安装有传送带,载具和动模形成配合,动模位于传送带的上方;流水线框架上固定安装有限位块,限位块位于动模的上方。该发明通过动模带动工件进行流水线输送,实现了工件的自动化运输和搬运,提高了定位的精准性,但是这样的结构不能实现工件的多种形式的定向移动,对工件的调节定位方式不足,机床的加工形式受限。
发明内容
本发明目的在于提供一种设置双导柱定位结构的智能机床,控制滑动底座进行多种形式的定向移动,实现了对放置机件的调节定位,便于机床的加工。
为解决上述技术问题,本发明采用的技术方案为:一种双导柱调节定位数控智能机床,包括机件放置机构,机件放置机构包括机床底板,机床底板上固定安装有底板滑轨,底板滑轨上滑动安装有放置台,放置台上固定安装有第一电机,第一电机的输出轴上固定安装有第一导柱,放置台上固定安装有第二电机,第二电机上固定安装有第二导柱,放置台上滑动安装有滑动底座,滑动底座同时在放置台上自由转动,滑动底座上固定安装有移动蜗轮,移动蜗轮与第一导柱形成螺纹配合,第二导柱与移动蜗轮形成螺纹配合,滑动底座上固定安装有放置收缩缸,放置收缩缸的伸缩端上放置有机件,机床底板上固定安装有底板电机,机床底板上转动安装有底板丝杆,底板丝杆与底板电机的输出轴固定连接,底板丝杆与放置台形成螺纹配合。
进一步地,智能机床包括夹持机构,夹持机构包括放置板,放置板固定安装在滑动底座上,放置板上固定安装有夹持座,夹持座上滑动安装有夹持滑块,夹持滑块上转动安装有夹持轮杆,夹持轮杆的两端安装有小轮,机件放置在夹持座上;夹持座上转动安装有连接杆,夹持滑块上固定安装有滑块杆,滑块杆与连接杆转动连接,夹持座上固定安装有夹持气缸,夹持气缸的伸缩端与夹持滑块固定连接。
进一步地,智能机床包括操作台机构,操作台机构包括操作台架,操作台架固定安装在机床底板上,操作台架上固定安装有升降滑轨,升降滑轨上滑动安装有升降滑块,操作台架上固定安装有升降电机,升降电机的输出轴上固定安装有升降丝杆,升降丝杆与升降滑块形成螺纹配合。
进一步地,升降滑块上固定安装有固定板,固定板上固定安装有定位支架,定位支架上固定安装有定位电机,定位电机的输出轴上固定安装有定位丝杆,定位支架上滑动安装有定位滑板,定位滑板与定位丝杆形成螺纹配合。
进一步地,定位滑板上固定安装有前移电机,定位滑板上转动安装有打磨丝杆,打磨丝杆与前移电机的输出轴固定连接,定位滑板上滑动安装有多方向刀具机构。
进一步地,多方向刀具机构包括打磨滑块,打磨滑块滑动安装在定位滑板上,打磨滑块与打磨丝杆形成螺纹配合,打磨滑块上转动安装有打磨电机,打磨电机的输出轴上固定安装有转向主杆,打磨电机上固定安装有导向主板,导向主板上固定安装有导向电机,导向电机的输出轴上固定安装有导向副板,导向副板上转动安装有导向副杆,导向副杆上固定安装有球副,导向副杆通过球副与转向主杆转动连接,导向副杆上固定安装有打磨刀具。
进一步地,打磨滑块上滑动安装有调节块,固定板上固定安装有斜面杆,固定板与调节块形成配合,打磨滑块上固定安装有卷簧,卷簧的一端与打磨滑块固定连接,卷簧的另一端与调节块固定连接,打磨电机上固定安装有调节转杆,调节转杆与调节块滑动连接。
进一步地,智能机床包括切换刀具机构,切换刀具机构包括夹持电机,夹持电机固定安装在定位支架上,夹持电机的输出轴上固定安装有夹持丝杆,定位支架上滑动安装有夹持滑座,夹持滑座与夹持丝杆形成螺纹配合,夹持滑座上转动安装有横移丝杆,夹持滑座上滑动安装有夹持组件,夹持组件与横移丝杆形成螺纹配合。
进一步地,定位支架上固定安装有刀具转座,刀具转座上转动安装有刀具转盘,刀具转座上固定安装有转盘电机,转盘电机的输出轴与刀具转盘固定连接,刀具转盘上固定放置有铣刀。
本发明与现有技术相比的有益效果是:(1)本发明通过设置双导柱的结构,控制滑动底座可以进行多种形式的定向移动,实现了对放置机件的调节定位,便于机床的加工;(2)本发明的夹持机构设置夹持轮杆,夹持轮杆移动至夹持轮杆的两端的小轮均与机件接触,完成对机件的固定,连接杆转动带动另一侧的夹持滑块移动,实现对机件的定位组合夹紧:(3)本发明的操作台机构控制多方向刀具机构在多个方向上移动,便于机床的加工定位;(4)本发明的多方向刀具机构可以调节角度,同时可以在不工作时自动收回,保护机床自身。
附图说明
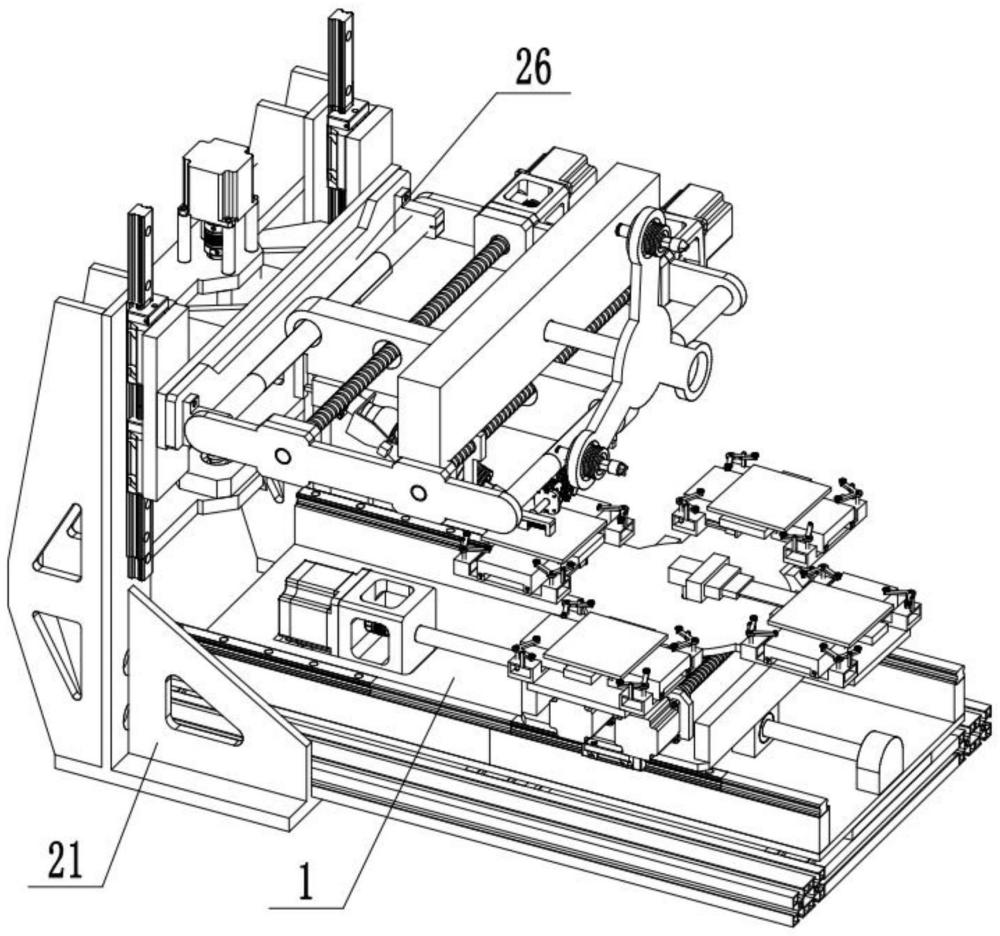
图1为本发明的整体结构示意图。
图2为本发明的机件放置机构示意图。
图3为本发明的机件放置机构内部结构示意图。
图4为本发明的滑动底座示意图。
图5为本发明的夹持机构示意图。
图6为本发明的夹持机构底部示意图。
图7为本发明的操作台机构示意图。
图8为本发明的升降滑轨示意图。
图9为本发明的切换刀具机构示意图。
图10为本发明的夹持组件示意图。
图11为本发明的多方向刀具机构示意图。
图12为本发明的调节块示意图。
图13为本发明的固定板示意图。
附图标号:1-机床底板;2-底板滑轨;3-放置台;4-底板电机;5-底板丝杆;6-第一电机;7-第一导柱;8-第二电机;9-第二导柱;10-滑动底座;11-移动蜗轮;12-放置收缩缸;13-放置板;14-机件;15-夹持座;16-夹持滑块;17-夹持轮杆;18-连接杆;19-滑块杆;20-夹持气缸;21-操作台架;22-升降滑轨;23-升降电机;24-升降丝杆;25-升降滑块;26-固定板;27-定位支架;28-定位电机;29-定位丝杆;30-定位滑板;31-打磨丝杆;32-前移电机;33-打磨滑块;34-调节块;35-卷簧;36-调节转杆;37-打磨电机;38-转向主杆;39-导向主板;40-导向电机;41-导向副板;42-导向副杆;43-球副;44-打磨刀具;45-夹持电机;46-夹持丝杆;47-夹持滑座;48-横移丝杆;49-夹持组件;50-刀具转座;51-刀具转盘;52-转盘电机;53-铣刀。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
实施例:如图1-图13所示的一种双导柱调节定位数控智能机床,包括机件放置机构,机件放置机构包括机床底板1,机床底板1上固定安装有底板滑轨2,底板滑轨2上滑动安装有放置台3,放置台3上固定安装有第一电机6,第一电机6的输出轴上固定安装有第一导柱7,放置台3上固定安装有第二电机8,第二电机8上固定安装有第二导柱9,放置台3上滑动安装有滑动底座10,滑动底座10同时在放置台3上自由转动,滑动底座10上固定安装有移动蜗轮11,移动蜗轮11与第一导柱7形成螺纹配合,第二导柱9与移动蜗轮11形成螺纹配合,滑动底座10上固定安装有放置收缩缸12,放置收缩缸12的伸缩端上放置有机件14,机床底板1上固定安装有底板电机4,机床底板1上转动安装有底板丝杆5,底板丝杆5与底板电机4的输出轴固定连接,底板丝杆5与放置台3形成螺纹配合。底板电机4启动,带动底板丝杆5转动,底板丝杆5带动放置台3在底板滑轨2上滑动,改变放置台3的前后位置;第一电机6和第二电机8分别控制第一导柱7和第二导柱9的正反方向的转动;第一导柱7正转、第二导柱9正转,第一导柱7和第二导柱9给予移动蜗轮11相同方向的力,移动蜗轮11正向移动,带动滑动底座10在放置台3上滑动;第一导柱7正转、第二导柱9反转,第一导柱7和第二导柱9给予移动蜗轮11相反方向的力,移动蜗轮11带动滑动底座10在原地正向转动;第一导柱7反转、第二导柱9正转,移动蜗轮11带动滑动底座10原地反向转动;第一导柱7反转、第二导柱9反转,移动蜗轮11带动滑动底座10在放置台3上反向滑动;此外,还可以控制第一电机6和第二电机8的不同的转动速率,实现滑动底座10的定向移动的同时,伴随着定向转动,实现双导柱调节定位,滑动底座10移动带动放置收缩缸12移动,放置收缩缸12伸长连接机件14,放置收缩缸12缩回将机件14收回,在需要对机件14加工时,放置收缩缸12伸长将机件14放置。
智能机床包括夹持机构,夹持机构包括放置板13,放置板13固定安装在滑动底座10上,放置板13上固定安装有夹持座15,夹持座15上滑动安装有夹持滑块16,夹持滑块16上转动安装有夹持轮杆17,夹持轮杆17的两端安装有小轮,机件14放置在夹持座15上;夹持座15上转动安装有连接杆18,夹持滑块16上固定安装有滑块杆19,滑块杆19与连接杆18转动连接,夹持座15上固定安装有夹持气缸20,夹持气缸20的伸缩端与夹持滑块16固定连接。夹持气缸20启动,带动夹持滑块16在夹持座15上滑动,夹持滑块16移动带动夹持轮杆17移动,夹持轮杆17的其中一端的小轮与机件14的侧面接触,夹持轮杆17移动至夹持轮杆17的两端的小轮均与机件14接触,完成对机件14的固定,夹持座15的另一侧也设置有夹持滑块16,夹持滑块16移动带动滑块杆19移动,滑块杆19移动带动连接杆18转动,连接杆18转动带动另一侧的夹持滑块16移动,实现对机件14的定位组合夹紧。
智能机床包括操作台机构,操作台机构包括操作台架21,操作台架21固定安装在机床底板1上,操作台架21上固定安装有升降滑轨22,升降滑轨22上滑动安装有升降滑块25,操作台架21上固定安装有升降电机23,升降电机23的输出轴上固定安装有升降丝杆24,升降丝杆24与升降滑块25形成螺纹配合。升降电机23启动,带动升降丝杆24转动,升降丝杆24带动升降滑块25上下移动,实现操作台的上下移动定位。
升降滑块25上固定安装有固定板26,固定板26上固定安装有定位支架27,定位支架27上固定安装有定位电机28,定位电机28的输出轴上固定安装有定位丝杆29,定位支架27上滑动安装有定位滑板30,定位滑板30与定位丝杆29形成螺纹配合。定位电机28启动,带动定位丝杆29转动,定位丝杆29带动定位滑板30在定位支架27上移动,定位滑板30移动实现操作台的左右移动定位。
定位滑板30上固定安装有前移电机32,定位滑板30上转动安装有打磨丝杆31,打磨丝杆31与前移电机32的输出轴固定连接,定位滑板30上滑动安装有多方向刀具机构。前移电机32启动带动打磨丝杆31转动,打磨丝杆31带动多方向刀具机构移动,实现操作台的前后移动定位。
多方向刀具机构包括打磨滑块33,打磨滑块33滑动安装在定位滑板30上,打磨滑块33与打磨丝杆31形成螺纹配合,打磨滑块33上转动安装有打磨电机37,打磨电机37的输出轴上固定安装有转向主杆38,打磨电机37上固定安装有导向主板39,导向主板39上固定安装有导向电机40,导向电机40的输出轴上固定安装有导向副板41,导向副板41上转动安装有导向副杆42,导向副杆42上固定安装有球副43,导向副杆42通过球副43与转向主杆38转动连接,导向副杆42上固定安装有打磨刀具44。打磨电机37启动带动转向主杆38转动,转向主杆38转动通过球副43带动导向副杆42转动,导向副杆42带动打磨刀具44转动,打磨刀具44转动对机件14进行打磨加工;导向电机40启动带动导向副板41在导向主板39上转动,导向副板41转动改变导向副杆42的方向,但是由于球副43的作用,转向主杆38依然可以带动导向副杆42转动,导向副杆42带动打磨刀具44转动,改变打磨刀具44的加工角度。
打磨滑块33上滑动安装有调节块34,固定板26上固定安装有斜面杆,固定板26与调节块34形成配合,打磨滑块33上固定安装有卷簧35,卷簧35的一端与打磨滑块33固定连接,卷簧35的另一端与调节块34固定连接,打磨电机37上固定安装有调节转杆36,调节转杆36与调节块34滑动连接。打磨滑块33在定位滑板30滑动期间,当调节块34移动至与固定板26的斜面杆接触,斜面杆压动调节块34在打磨滑块33上向上滑动,调节块34滑动带动调节转杆36转动,调节转杆36转动带动打磨电机37向上转动,实现多方向刀具机构的回收,卷簧35用于控制调节块34的自动回位。
智能机床包括切换刀具机构,切换刀具机构包括夹持电机45,夹持电机45固定安装在定位支架27上,夹持电机45的输出轴上固定安装有夹持丝杆46,定位支架27上滑动安装有夹持滑座47,夹持滑座47与夹持丝杆46形成螺纹配合,夹持滑座47上转动安装有横移丝杆48,夹持滑座47上滑动安装有夹持组件49,夹持组件49与横移丝杆48形成螺纹配合。夹持电机45启动带动夹持丝杆46转动,夹持丝杆46带动夹持滑座47在定位支架27上移动,对夹持组件49进行左右定位,横移丝杆48在夹持滑座47上转动带动夹持组件49移动,对夹持组件49进行前后定位,夹持组件49临时夹取打磨刀具44,便于打磨刀具44的更换。
定位支架27上固定安装有刀具转座50,刀具转座50上转动安装有刀具转盘51,刀具转座50上固定安装有转盘电机52,转盘电机52的输出轴与刀具转盘51固定连接,刀具转盘51上固定放置有铣刀53。转盘电机52启动带动刀具转盘51转动,刀具转盘51上设置有多个槽位,横移丝杆48转动带动夹持组件49前后移动时,夹持组件49将打磨刀具44放置到刀具转盘51的空槽位上,随后刀具转盘51转动,将铣刀53移动至最下方的位置,夹持组件49抓取铣刀53,夹持组件49将铣刀53移动至导向副杆42上,完成铣刀53与导向副杆42的安装,完成了打磨刀具44与铣刀53的切换,机床由打磨工作切换至铣削工作。
- 一种角度可调节的数控机床用工件夹具
- 一种机床数控多角度定位挡尺
- 一种数控机床用自动化高精度定位夹紧装置
- 一种智能数控机床用机床定位夹具
- 一种智能数控机床用机床定位夹具