一种智能车强制换道汇入点确定方法及装置
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及智能交通控制领域,具体涉及一种智能车强制换道汇入点确定方法及装置。
背景技术
随着计算机、无线通讯、车辆工程等技术的飞速发展,常规汽车已逐渐配备智能设备,逐步往智能车发向发展,包括智能网联汽车、自动驾驶汽车。在“交通强国”战略背景下,互联网公司和传统车企合作,不断推陈出新,完善智能车的性能,不断提高行驶安全性和通行效率。
按行驶方向分类,车辆的行驶分为横向换道和纵向跟驰。横向换道行为往往具有更高的风险,对通行能力,乃至能耗和排放的消极影响相对更大。已有研究中,中国专利CN201810722075.9通过构造行车收益函数与损失函数,进行综合换道收益计算,完成车辆换道的决策任务;中国专利CN201810351811.4通过检测器预测是否会与本车道、目标车道的前后车发生碰撞,控制转向灯;同样的,中国专利CN201810906731.0通过所建碰撞安全模型对超车换道阶段进行安全监控。总体来说,现有研究偏向于宏观控制,均缺乏对换道间隙汇入点的研究,忽略换道行为对目标车辆和目标车道内跟随车辆的影响,鲜有对强制换道汇入点进行微观研究。
发明内容
发明目的:为了克服上述现有技术的不足,本发明目的在于提出一种智能车强制换道汇入点确定方法及装置,以目标车辆、目标车道内跟随车辆和前导车辆的速度、位置为基本信息,计算目标车辆和目标车道内跟随车辆的临界安全间隙,历史自由换道和强制换道的礼貌因子为依据,确定目标车辆当前强制换道的礼貌因子,并计算该强制换道的汇入点,为驾驶员或智能车的判断和决策提供依据,保障了道路交通安全、高效、平稳的状态。
技术方案:为解决上述技术问题,本发明采用的技术方案为:
一种智能车强制换道汇入点确定方法,包括如下步骤:
(1)获取目标车辆的换道微观信息,所述换道微观信息包括目标车辆的速度、位置数据、目标车道内前导车辆的速度、位置数据和目标车道内跟随车辆的速度、位置数据;
(2)计算目标车辆和目标车道内跟随车辆的临界安全间隙,目标车辆的临界安全间隙
(3)分别计算自由换道和强制换道对应的礼貌因子:
当发生自由换道时,考虑目标车辆和目标车道内前导车辆,对目标车辆本身的礼貌因子λ
当发生强制换道时,考虑目标车辆和目标车道内前导车辆,对目标车辆本身的礼貌因子λ
(4)基于目标车辆前N次自由换道和前N次自由换道时的礼貌因子,计算目标车辆当前强制换道汇入点的位置x
其中L
一种智能车强制换道汇入点确定装置,包括:
智能车状态感知模块,包括对本车的自感知单元、对目标车道内跟随车辆的感知单元和对目标车道内前导车辆的感知单元,分别用于获取目标车辆的速度、位置数据、目标车道内前导车辆的速度、位置数据和目标车道内跟随车辆的速度、位置数据;
数据存储模块,包括历史数据单元和实时数据单元,分别用于存储历史和实时换道数据;
临界安全间隙计算模块,包括目标车辆的临界安全间隙计算单元和目标车道内跟随车辆的临界安全间隙计算单元,用于根据如权利要求1中步骤(2)所述的方法分别计算目标车辆和目标车道内跟随车辆的临界安全间隙;
礼貌因子计算模块,包括目标车辆的礼貌因子计算单元和目标车道内跟随车辆的礼貌因子计算单元,用于根据如权利要求1中步骤(3)所述的方法分别计算目标车辆和目标车道内跟随车辆在自由换道和强制换道时的礼貌因子;
目标车辆当前强制换道汇入点确定模块,用于根据如权利要求1中步骤(4)所述的方法计算目标车辆当前强制换道汇入点的位置。
有益效果:本发明提出的一种智能车强制换道汇入点确定方法,基于既有车辆信息数据库和实时感知系统,以目标车辆、目标车道内前导车辆和跟随车辆为对象,以速度和位置信息为基础,计算目标车辆和目标车道内跟随车辆的临界安全间隙,并根据历史四类换道行为数据确定当前智能车强制换道的礼貌因子,以此为依据,确定当前智能车强制换道的汇入点。本发明提供的方法综合考虑换道车辆与目标车道内前后车的相互作用,强制换道汇入点选择更加科学、精准、快捷,进而为驾驶员或智能车提供科学合理的判断和决策依据,为道路交通安全和行驶效率提供保障。
附图说明
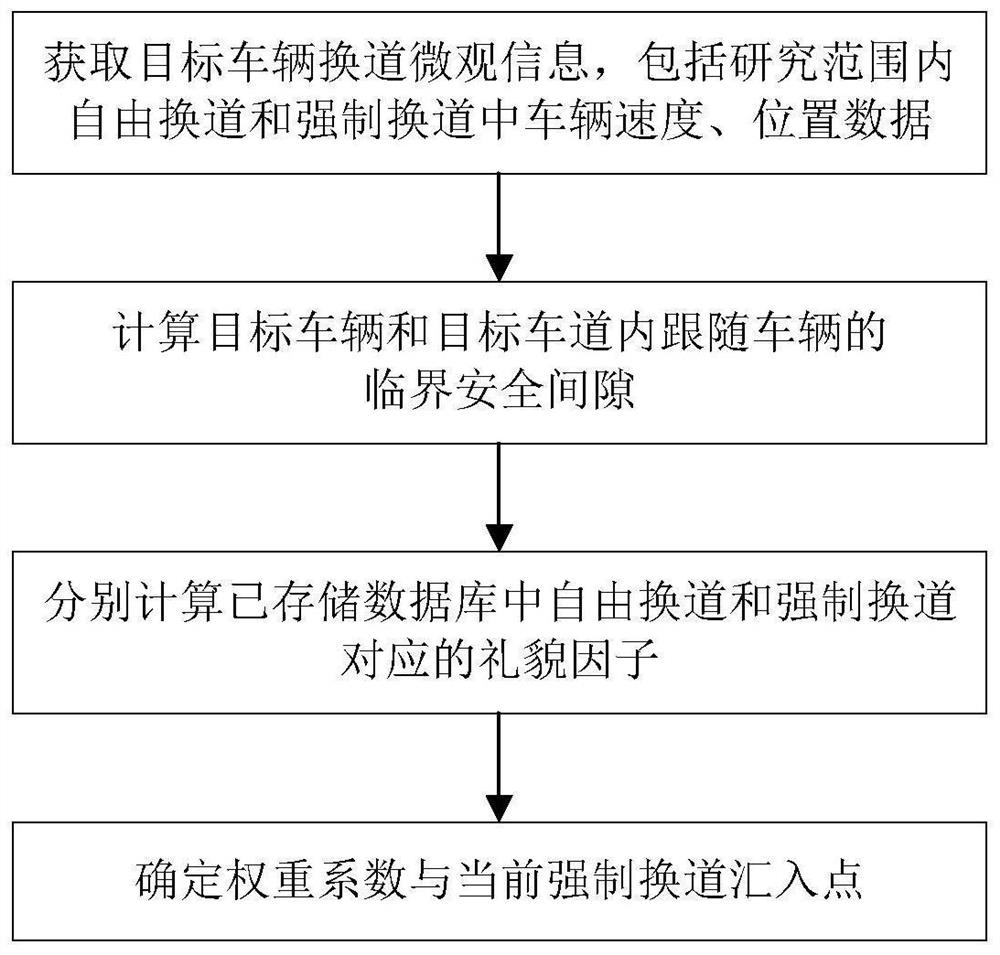
图1是本发明实施例的方法流程图;
图2是本发明实施例的临界安全间隙计算示意图;
图3是本发明实施例的示例中交通状况的示意图;
图4是本发明实施例的示例中强制换道汇入点的示意图;
图5是本发明实施例的装置结构示意图。
具体实施方式
为了使本发明的内容更容易被清楚的理解,下面结合附图和具体实施例对本发明作进一步详细的说明。
如图1所示,本发明实施例公开的一种智能车强制换道汇入点确定方法,包括如下步骤:
(1)获取目标车辆换道微观信息,所述换道微观信息包括目标车辆、目标车道内前导车辆和跟随车辆的速度、位置数据。
具体的,车辆微观数据的获取方式可以通过智能车的环境感知系统自动获取,可以通过车-车或车-路协同控制系统获取,也可以通过物联网、云数据平台获取。测量或分享所得的目标车道内前导车辆和跟随车辆的位置信息可以通过其与目标车辆相对位置而确定。坐标x轴平行于道路中心线,y轴垂直于道路中心线。
(2)计算目标车辆和目标车道内跟随车辆的临界安全间隙。
本实施例中,目标车辆的临界安全间隙
(3)分别计算自由换道和强制换道对应的礼貌因子。
具体的,如图2所示,历史换道数据库中换道对应的四类礼貌因子按如下方法计算:
当发生自由换道时,考虑目标车辆
当发生强制换道时,考虑目标车辆
(4)基于目标车辆前N次自由换道和前N次自由换道时的礼貌因子,计算目标车辆当前强制换道汇入点的位置x
其中L
本发明中N默认取历史数据中最近的100次换道行为,以反映最新的驾驶水平和乘客接受程度。α
下面根据某交通示例对本发明作进一步阐述。
交通示例:某一车辆行驶在一条单向三车道道路上,目标车辆编号
表1某一时刻所有车辆的信息
其他参数中,计算临界安全间隙时的参数k
以下将采用本发明提出的一种智能车强制换道汇入点的确定方法:
(1)从目标车辆的信息数据库提取研究范围内所有车辆微观数据,如上表所示;
(2)计算目标车辆和目标车道内跟随车辆的临界安全间隙:
因此,考虑目标车辆
(3)分别计算已存储数据库中自由换道和强制换道对应的礼貌因子,示例中已给出历史换道数据中四类礼貌因子
(4)根据已存储数据库中有效自由换道和强制换道的礼貌因子均值,以及对应权重系数,计算目标车辆当前强制换道行为的礼貌因子:
进一步计算该强制换道汇入点的位置:
换道汇入点为-0.53m(如图4所示),意味着对比换道前目标车辆、目标车道内跟随车辆和前导车辆的三车位置,目标车辆需要减速后再变道汇入目标车道。此时目标车道内跟随车辆的礼貌因子为:
由此可见,λ
如图5所示,本发明实施例公开的一种智能车强制换道汇入点确定装置,包括:智能车状态感知模块、数据存储模块、临界安全间隙计算模块、礼貌因子计算模块、目标车辆当前强制换道汇入点确定模块;其中,智能车状态感知模块,用于获取目标车辆换道微观信息,所述换道微观信息包括目标车辆、目标车道内前导车辆和跟随车辆的速度、位置数据;数据存储模块,用于存储历史和实时换道数据;临界安全间隙计算模块,用于计算目标车辆和目标车道内跟随车辆的临界安全间隙;礼貌因子计算模块,用于计算目标车辆和目标车道内跟随车辆的礼貌因子;目标车辆当前强制换道汇入点确定模块,用于根据当前车辆和目标车道内前导车辆位置关系,计算确定目标车辆汇入目标车道的位置。
其中,智能车状态感知模块包括:对本车的自感知单元、对目标车道内跟随车辆的感知单元和对目标车道内前导车辆的感知单元,用于采集目标车辆和目标车道内前后车的信息;数据存储模块包括:历史数据单元和实时数据单元,用于存储、读取历史和实时换道数据;临界安全间隙计算模块包括:目标车辆的临界安全间隙计算单元和目标车道内跟随车辆的临界安全间隙计算单元;礼貌因子计算模块包括:目标车辆的礼貌因子计算单元和目标车道内跟随车辆的礼貌因子计算单元。
本实施例公开的一种智能车强制换道汇入点确定装置与一种智能车强制换道汇入点确定方法实施例属于同一构思,具体实现过程详见方法实施例,此处不再赘述。
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
- 一种智能车强制换道汇入点确定方法及装置
- 一种智能车强制换道汇入点确定方法及装置