物体识别装置
文献发布时间:2023-06-19 09:36:59
技术领域
本发明涉及对车辆周边的物体进行识别的物体识别装置。
背景技术
专利文献1中公开了关于目标物检测装置的技术,该目标物检测装置基于目标物的光流(optical flow),判定目标物为横穿目标物。该技术的目标物检测装置使用毫米波雷达波检测目标物,并计算表示该目标物为从车辆前方横穿的行人横穿目标物的准确度的综合似然。而且,当判定为综合似然在预先设定的阈值以上的情况下,将检测到的目标物判定为行人横穿目标物。
现有技术文献
专利文献1:日本特开2018-147399号公报
发明内容
发明所要解决的问题
在物体检测中,检测物体的类(class)的同时,也检测表示其准确程度(可靠度)的似然。在此,如上述专利文献1的装置那样,在通过对检测出的似然与阈值的比较来进行物体检测的判定的构成中,通过将似然的阈值设定得较低,相比于设定得较高的情况,能够降低未检测到物体的可能性。但是,考虑到安全性,并非将似然的阈值设定得低就好。这是因为,将似然的阈值设定得越低,则物体的误检测的可能性越高。物体的误检测例如会导致使车辆进行原本不需要的减速或者回避动作,可能会妨碍车辆的顺畅行驶。因此,为了高效地检测物体,需要在判断能够在多大程度上容许相对于未检测到物体的风险之后设定似然阈值。
在此,在物体检测中发生未检测到物体时的风险根据该物体的类而不同。例如,当比较行人与静止物时,可以说未检测到行人的风险较高。在上述专利文献1的技术中,检测物体时,没有考虑与按物体的类而不同的风险有关的信息。因此,对于高效地检测物体,上述专利文献1的技术尚留有改善的余地。
本发明是鉴于如上所述的问题而做出的,目的在于提供一种能够进行与物体的类相应的高效物体检测的物体识别装置。
用于解决问题的技术方案
为了解决上述的问题,第1发明应用于对车辆周边的物体进行识别的物体识别装置。车辆具备取得周边信息的传感器装置。物体识别装置具备:存储装置,其保存周边信息和容许度信息,所述容许度信息是按物体的类表示对于未检测到该物体的容许程度的信息;以及处理器,其进行识别车辆周边的物体的物体识别处理。在物体识别处理中,处理器基于周边信息来辨别成为检测对象的物体及其类,并计算表示物体的检测的准确度的参数、即似然,基于容许度信息,计算与物体对应的似然的阈值,并基于对似然与阈值的比较,判定是否输出物体的辨别结果。
第2发明在第1发明中还具有以下特征。
在存储装置中保存有与车辆的自身位置相关联的多个容许度信息。在物体识别处理中,处理器检测自身位置,从多个容许度信息中选择与自身位置对应的容许度信息,基于选择出的容许度信息,计算与物体对应的似然的阈值。
第3发明在第1发明中还具有以下特征。
在存储装置中保存有与车辆的周边环境条件相关联的多个容许度信息。在物体识别处理中,处理器检测车辆周边的周边环境条件,从多个容许度信息中选择与周边环境条件对应的容许度信息,基于选择出的容许度信息,计算与物体对应的似然的阈值。
第4发明在第3发明中还具有以下特征。
周边环境条件是表示车辆周边的降雨量的降雨量条件。在物体识别处理中,处理器检测降雨量作为周边环境条件。
第5发明在第3发明中还具有以下特征。
周边环境条件是表示车辆周边的照度的照度条件。在物体识别处理中,处理器检测照度作为周边环境条件。
第6发明在第1至第5发明中的任一发明中还具有以下特征。
传感器装置是拍摄周边环境的图像的拍摄装置。车辆还具备测量测距数据的测距传感器。处理器构成为还进行:对测距数据进行聚类的聚类(clustering)处理;和将通过聚类处理而被目标物化的测距点群与辨别结果识别为同一物体的融合(fusion)处理。
发明效果
根据本发明涉及的物体识别装置,在存储装置中保存有按物体的类表示对于未检测到该物体的容许程度的容许度信息。基于该容许度信息来算出似然的阈值。由此,对于未检测到物体的容许程度被反映于阈值,因此能够进行与物体的类相应的高效物体检测。
附图说明
图1是用于说明实施方式1涉及的物体识别装置的构成的框图。
图2是表示容许度映射(map)的一例的图。
图3是表示物体识别装置用于进行物体识别处理的功能的框图。
图4是对测距传感器类的各种性能进行比较的比较图。
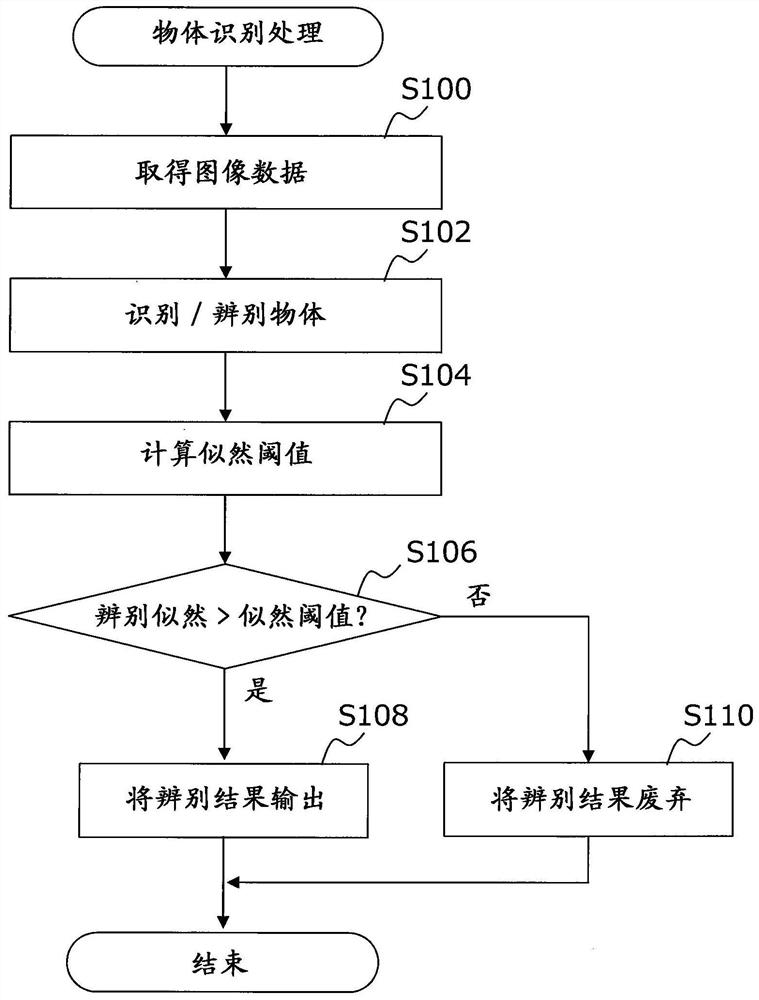
图5是表示实施方式1的物体识别处理的流程的流程图。
图6是表示实施方式1的物体识别处理的流程的流程图。
图7是表示图像数据的辨别结果的示意(image)图像的图。
图8是表示通过聚类将测距点群目标物化得到的结果的示意图像的图。
图9是表示通过融合处理对图像数据的辨别结果重叠了聚类目标物得到的结果的示意图像的图。
图10是用于说明实施方式2涉及的物体识别装置的构成的框图。
图11是表示实施方式2涉及的物体识别装置用于进行容许度映射选定处理的功能的框图。
图12是用于说明实施方式3涉及的物体识别装置的构成的框图。
图13是表示实施方式3涉及的物体识别装置用于进行容许度映射选定处理的功能的框图。
图14是用于说明实施方式4涉及的物体识别装置的构成的框图。
图15是表示实施方式4涉及的物体识别装置用于进行容许度映射选定处理的功能的框图。
标号说明
10物体识别装置;20自立识别传感器类;22摄像头(camera);24测距传感器;30处理器;40存储装置;42传感器信息;44容许度信息;46辨别结果信息;102物体检测/辨别部;104分类阈值计算部;106输出判定部;108聚类运算部;110融合目标物运算部;112车辆行动计划运算部;120车辆自身位置运算部;122容许度映射选定部;130降雨量运算部;132容许度映射选定部;140照度运算部;142容许度映射选定部。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。不过,在以下所示的实施方式中提及了各要素的个数、数量、量、范围等数的情况下,除了特别明示的情况和在原理上明显为该数的情况之外,本发明不限定于该提及的数。另外,在以下所示的实施方式中说明的构造、步骤等,除了特别明示的情况和明显在原理上确定为此的情况之外,对于本发明而言未必是必须的。
1.实施方式1
1-1.物体识别装置的构成
图1是用于说明实施方式1涉及的物体识别装置的构成的框图。物体识别装置10与搭载于车辆的自立识别传感器类20连接。自立识别传感器类20作为取得车辆的周边信息的传感器装置而发挥功能,包括摄像头22和测距传感器24。
摄像头22是拍摄车辆周边的图像的拍摄装置。摄像头22例如以朝向车辆前方的方式设置在车室内的前挡风玻璃的上方。
测距传感器24是能够测定从车辆到对象物体的距离的传感器,例如构成为包括激光雷达(LIDAR:Laser Imaging Detection and Ranging)和/或雷达。测距传感器24例如设置在车辆的车顶上,输出发射波,并接收来自物体的测距点的反射波。根据反射波的接收状态,对到物体的距离和方向进行检测。
物体识别装置10识别车辆的周边的物体。物体识别装置10具备处理器30和存储装置40。存储装置40中保存有各种信息。处理器30通过执行计算机程序来进行各种处理。计算机程序被保存于存储装置40。也可以为在计算机可读取的记录介质中记录有计算机程序。
处理器30进行取得传感器信息42的“传感器信息取得处理”。处理器30将取得的传感器信息42保存于存储装置40。传感器信息42包含由摄像头22得到的图像数据和由测距传感器24得到的测距数据。测距数据中包含与到测距点的距离有关的信息、与测距点的高度有关的信息、以及与测距点的方向有关的信息。
再者,处理器30进行识别车辆周边的物体的“物体识别处理”。如后所述,处理器30基于传感器信息42和容许度信息44,进行物体识别处理。
容许度信息44是按类别表示出在物体识别处理中未检测到物体的风险的高低的信息。换言之,也可以说容许度信息44是表示出对于在物体识别处理中未检测到物体的容许程度的信息。存储装置40将表示按类的容许程度的容许度信息44例如保存为量化得到的映射。以下,将该映射称为“容许度映射”。图2是表示容许度映射的一例的图。如该图所示,在容许度映射中,按车辆、行人、摩托车、自行车这样的类,容许度被量化而被存储。例如对于未检测到物体的容许程度越低、也即是说未检测到物体带来的风险越高,则容许度表示为越小的数值。典型地,如行人或者自行车等、对人的生命影响越大的类,容许度设定得越小。
此外,物体识别装置10例如由搭载于车辆的微型计算机实现。但是,物体识别装置10也可以不一定搭载于车辆。在能够取得物体识别处理所需的信息的范围内,物体识别装置10的设置位置没有限定。以下,进一步详细对物体识别处理进行说明。
1-2.物体识别处理
图3是表示物体识别装置用于进行物体识别处理的功能的框图。物体识别处理由物体识别装置10具备的物体检测/辨别部102、分类阈值计算部104、输出判定部106、聚类运算部108、融合目标物运算部110以及车辆行动计划运算部112来实现。上述各部102、104、106、108、110、112在存储于存储装置40的计算机程序由处理器30执行时以软件的方式来实现。
物体检测/辨别部102将通过传感器信息取得处理所取得的图像数据作为输入,检测图像内的物体。另外,物体检测/辨别部102对检测出的物体的位置、大小、类及其似然进行辨别,将其辨别结果作为辨别结果信息46保存于存储装置40。此处的似然是表示相对于检测出的物体的、类的准确度(可靠度)的程度的参数。以下,将由物体检测/辨别部102辨别的物体、类以及似然分别称为“辨别目标物”、“辨别类”以及“辨别似然”。典型地,辨别似然能够由0到1之间的数值表示。准确度越低,则辨别似然为越接近“0”的值,准确度越高,则辨别似然为越接近“1”的值。在物体检测/辨别部102中辨别出的辨别结果信息46也被输出到分类阈值计算部104以及输出判定部106。
分类阈值计算部104将辨别结果信息46作为输入,计算似然的阈值。分类阈值计算部104使用存储于存储装置40的容许度信息44(容许度映射),确定与辨别结果信息46所包含的辨别类对应的容许度。而且,分类阈值计算部104基于所确定的容许度,计算似然阈值。典型地,容许度越小,则似然阈值被计算为越小的值。将计算出的似然阈值输出到输出判定部106。
输出判定部106将辨别结果信息46所包含的辨别似然、和在分类阈值计算部104中计算出的似然阈值作为输入,判定是否输出辨别结果。输出判定部106在辨别似然比似然阈值大的情况下,将辨别结果信息46输出到融合目标物运算部110。另一方面,输出判定部106在辨别似然在似然阈值以下的情况下,将存储于存储装置40的辨别结果信息46废弃。
聚类运算部108进行将通过传感器信息取得处理所取得的测距数据聚类的“聚类处理”。聚类处理例如基于基准坐标系中的各测距点的位置和高低来进行,该基准坐标系以车辆为中心,沿车辆的前后方向取X轴(纵轴),沿左右方向取Y轴(横轴)。另外,以保持与上次的帧中的聚类处理结果的连续性的方式进行聚类处理。聚类运算部108进行的聚类处理的具体方法没有特别限定。可以使用公知的聚类方法。被施行了聚类处理的测距点群在基准坐标系中例如由长方形的框包围而被作为一个目标物。基准坐标系中的目标物的位置表示检测出的物体的相对于自身车辆的相对位置,目标物的框的范围表示检测出的物体在平面上的范围。以下,将通过聚类处理导出的目标物称为“聚类目标物”。将运算出的聚类目标物输出到融合目标物运算部110。此外,目标物的框的形状不限于长方形,例如也可以设为采用梯形、椭圆等与测距点群所示的形状近似的形状。
融合目标物运算部110进行将在聚类运算部108中运算出的聚类目标物、和在输出判定部106中被辨别的辨别目标物识别为同一物体的“融合处理”。图4是对测距传感器类的各种性能进行比较的比较图。通常,激光雷达和雷达具有如下特征:在测量精度方面优于摄像头,但在分辨率方面劣于摄像头。在物体识别处理中,通过融合处理将这些传感器的特征恰好地组合变得很重要。
在融合处理中,融合目标物运算部110对从聚类运算部108输入的聚类目标物附加从输出判定部106输入的辨别结果信息46。以下,将被施行了融合处理的目标物称为“融合目标物”。将运算出的融合目标物向车辆行动计划运算部112输出。
车辆行动计划运算部112根据接收到的融合目标物运算部110中的运算结果,运算车辆的行动计划。此外,这里的车辆的行动计划是用于利用物体识别处理的结果的驾驶辅助控制或者自动驾驶控制的行动计划。
1-3.在物体识别处理中执行的具体处理
通过上述的各部102、104、106、108、110、112的功能,物体识别装置10作为进行识别车辆周边的物体的物体识别处理的装置而发挥功能。图5以及图6是表示实施方式1的物体识别处理的流程的流程图。物体识别装置10的处理器30按各自预定的周期执行上述流程图所示的处理。
首先,对图5所示的流程图的处理进行说明。在步骤S100中,由摄像头22取得车辆周边的图像数据。另外,在步骤S102中,检测图像数据内的物体,按检测出的每个物体,运算包含辨别目标物、辨别类以及辨别似然的辨别结果信息46。在图7中,表示出图像数据的辨别结果的示意图像。在图7所示的例子中,由物体检测/辨别部102辨别出的辨别目标物由长方形包围而示出。例如,在该示意图像中,在车辆的前方表示有前车的辨别目标物T1和行人的辨别目标物H1等。
在步骤S104中,使用容许度信息44,运算与在步骤S102中辨别出的物体的辨别类对应的似然阈值。在接下来的步骤S106中,判定辨别似然是否大于似然阈值。其结果,在辨别似然比似然阈值大的情况下,处理前进至步骤S108,在辨别似然在似然阈值以下的情况下,处理前进至步骤S110。
在步骤S108中,将在步骤S102中辨别出的辨别结果信息46输出到融合目标物运算部110。另一方面,在步骤S110中,将在步骤S102中辨别出的辨别结果信息46废弃。步骤S108或者步骤S110的处理完成时,则本例程结束。
接着,对图6所示的流程图的处理进行说明。物体识别装置10的处理器30将图6所示的流程图的处理与图5所示的流程图的处理并行地执行。在步骤S200中,由雷达或者激光雷达等测距传感器24取得存在于车辆周边的物体的测距数据。在步骤S202中,对在步骤S200中取得的测距数据施行聚类处理,测距点群被目标物化为聚类目标物。在图8中,表示出通过聚类将测距点群目标物化得到的结果的示意图像。在图8所示的例子中,通过聚类处理而目标物化得到的聚类目标物由长方形包围而表示。例如,在该示意图像中,在车辆的前方表示有前车的聚类目标物T2和行人的聚类目标物H2等。
在步骤S204中,将在聚类运算部108中运算出的聚类目标物与在输出判定部106中被辨别的辨别目标物识别为同一物体。在图9中,表示出通过融合处理对图像数据的辨别结果重叠了聚类目标物得到的结果的示意图像。在步骤S206中,被识别为同一物体的融合目标物被利用于车辆的行动计划的运算。
根据按以上的步骤所进行的物体识别处理,由于能算出按物体的类反映了容许程度的似然阈值,因此能够减少未检测到容许程度低的物体、也即是说未检测到风险高的物体的情况。由此,后续的融合处理中的未分类的目标物减少,因此能够提高车辆的行动计划的安全性。
另外,根据实施方式1的物体识别处理,由于是使容许程度反映于似然阈值的构成,因此无需在物体检测/辨别部102中对运算的辨别结果信息46反映容许程度。由此,能够使物体检测/辨别部102的构成普通化(简易化)。
1-4.实施方式1涉及的物体识别装置的变形例
实施方式1涉及的物体识别装置10能够应用如下进行变形得到的构成。
物体检测/辨别部102不限于将由摄像头22取得的图像数据作为输入来检测图像内的物体的构成,也可以是将由激光雷达、雷达等测距传感器24取得的测距数据作为输入来检测图像内的物体的构成。该变形例也能够在后述的其他实施方式中应用。
2.实施方式2
接着,参照附图,对实施方式2的物体识别装置进行说明。
2-1.实施方式2涉及的物体识别装置的概要
在实施方式1涉及的物体识别装置中,设成了使用存储有按类的容许度的容许度映射来运算按类的似然阈值。在此,未检测到物体的风险根据车辆的自身位置而不同。例如,在车辆位于人行横道附近的情况下,认为存在行人的可能性比其他位置高。因此,在人行横道附近,从安全性的观点来看,可以说优选例如将行人的容许度设定得较低,从而将关于行人的似然阈值设定得较高。另一方面,例如在车辆位于高速道路上的情况下,认为存在行人的可能性比位于普通道路上的情况低。因此,在高速道路上,从车辆的顺畅行驶的观点来看,可以说优选例如将容许度设定得较高,从而将关于行人的似然阈值设定得较高。如此,在考虑将物体识别处理根据车辆的自身位置进行优化的情况下,无法由单一的容许度映射来应对。
于是,实施方式2涉及的物体识别装置10进行从多个容许度映射中选定与车辆的自身位置相应的最佳容许度映射的“容许度映射选定处理”。实施方式2涉及的物体识别装置10保有与地理上的区域划分相关联的多个容许度映射。这里的区域划分例如是高速道路、普通道路、市区、人行横道附近等。在容许度映射选定处理中,处理器30确定车辆的自身位置所属的区域划分,选定对应的容许度映射。而且,处理器30使用所选定的容许度映射,计算与检测出的物体对应的似然阈值。根据这种容许度映射选定处理,能够设定反映了与车辆的自身位置有关的信息的似然阈值,因此,能够提高物体的辨别率而不增加物体的误检测率。
2-2.实施方式2涉及的物体识别装置的构成
图10是用于说明实施方式2涉及的物体识别装置的构成的框图。除一部分构成之外,实施方式2涉及的物体识别装置10与图1所示的实施方式1的物体识别装置10基本相同。因此,在此以与图1所示的实施方式1的物体识别装置10的不同点为中心进行说明,并省略关于共通的要素的详细说明。
对于实施方式2涉及的物体识别装置10,连接有GPS(Global PositioningSystem,全球定位系统)接收机50以及地图数据库52。GPS接收机50搭载于车辆,基于GPS卫星发送的信号来取得表示车辆的位置的位置信息。地图数据库52例如形成在搭载于车辆的HDD、SSD等储存器内。地图数据库52所具有的地图信息中包含道路的位置信息、道路形状的信息、交叉路口以及分岔点的位置信息、道路的车道信息等。地图数据库52也可以保存于物体识别装置的存储装置40。存储装置40所保存的容许度信息44包含有按车辆的自身位置的区域划分相关联的多个容许度映射。
图11是表示实施方式2涉及的物体识别装置用于进行容许度映射选定处理的功能的框图。实施方式2涉及的容许度映射选定处理由车辆自身位置运算部120以及容许度映射选定部122实现。由GPS接收机50取得的位置信息被输入到车辆自身位置运算部120。车辆自身位置运算部120基于所输入的位置信息、和地图数据库52所具有的地图信息,推定车辆的自身位置。将推定出的自身位置输出到容许度映射选定部122。
容许度映射选定部122取得被输入的自身位置所属的区域划分。而且,容许度映射选定部122从容许度信息44所包含的多个容许度映射中选定与该区域划分相关联的容许度映射。在物体识别处理中,在似然阈值的计算中利用容许度映射选定部122中所选定的容许度映射。
根据按以上的步骤所进行的容许度映射选定处理,能够在物体识别处理中使用对应于车辆的自身位置所设定的容许度映射。由此,能够提高物体的辨别率而不增加物体的误检测率。
2-3.实施方式2涉及的物体识别装置的变形例
实施方式2涉及的物体识别装置10能够应用如下进行变形得到的构成。
在车辆自身位置运算部120中执行的自身位置的推定的方法没有限定。即,推定车辆的自身位置的方法已经在很多文献中为公众所知。在车辆自身位置运算部120的处理中,可以适当应用这些公知的方法来推定车辆的自身位置。
3.实施方式3
接着,参照附图,对实施方式3的物体识别装置进行说明。
3-1.实施方式3涉及的物体识别装置的概要
在实施方式2涉及的物体识别装置中,设成了基于车辆的自身位置进行容许度映射选定处理。在此,从摄像头22获得的图像数据也会根据车辆的周边环境条件而变化。例如,由于在下雨时视野会因附着在车辆的挡风玻璃上的雨滴而变得不清楚,因而未检测到行人等物体的情况可能会增加。因此,在考虑将物体识别处理根据车辆周边的天气(降雨量)进行优化的情况下,无法由单一的容许度映射来应对。
实施方式3涉及的物体识别装置10保有与降雨量条件相关联的多个容许度映射。在实施方式3涉及的物体识别装置10的容许度映射选定处理中,基于车辆周边的降雨量选定最佳容许度映射。多个容许度映射例如包括在降雨量在预定的阈值以上的情况下所选择的第一容许度映射、和在降雨量低于阈值的情况下所选择的第二容许度映射。例如,与第二容许度映射相比,第一容许度映射能够将对于同一物体的容许度设定得较低。在容许度映射选定处理中,处理器30根据降雨量选定对应的容许度映射。由此,能够降低与降雨量相应的未检出风险。
3-2.实施方式3涉及的物体识别装置的构成
图12是用于说明实施方式3涉及的物体识别装置的构成的框图。除一部分构成之外,实施方式3涉及的物体识别装置10与图1所示的实施方式1的物体识别装置10基本相同。因此,在此以与图1所示的实施方式1的物体识别装置10的不同点为中心进行说明,并省略关于共通的要素的详细说明。
对于实施方式3涉及的物体识别装置10,连接有雨滴传感器60。雨滴传感器60例如搭载于车辆的挡风玻璃,输出与附着于挡风玻璃的雨滴的量相应的信号。此外,雨滴传感器60的构成没有限定。雨滴传感器60可以使用检测降雨量的公知的传感器。另外,存储装置40所保存的容许度信息44中包含有与降雨量相关联的多个容许度映射。
图13是表示实施方式3涉及的物体识别装置用于进行容许度映射选定处理的功能的框图。实施方式3涉及的容许度映射选定处理由降雨量运算部130以及容许度映射选定部132实现。雨滴传感器的输出信号被输入到降雨量运算部130。降雨量运算部130基于所输入的输出信号,推定车辆周边的降雨量。将推定出的降雨量输出到容许度映射选定部132。
容许度映射选定部132判定所输入的降雨量是否在预定的阈值以上。而且,容许度映射选定部132在所输入的降雨量在预定的阈值以上的情况下,从容许度信息44所包含的多个容许度映射中选定与第一降雨量相关联的容许度映射。另一方面,容许度映射选定部122在所输入的降雨量低于预定的阈值的情况下,从容许度信息44所包含的多个容许度映射中选定与第二降雨量相关联的容许度映射。在物体识别处理中,在似然阈值的计算中利用容许度映射选定部122中所选定的容许度映射。
根据按以上的步骤所进行的容许度映射选定处理,在物体识别处理中,能选择与降雨量对应的容许度映射。由此,能够使降雨的影响反映于物体检测,因此能够提高物体的辨别率而不增加误检测率。
3-3.实施方式3涉及的物体识别装置的变形例
实施方式3涉及的物体识别装置10能够应用如下进行变形得到的构成。
多个容许度映射只要是由与不同的降雨量条件相关联的至少2个以上的容许度映射构成的,其内容没有限定。例如,容许度映射也可以构成为与晴天、小雨、大雨等降雨量不同的3个以上的降雨量条件相关联的多个容许度映射。
4.实施方式4
接着,参照附图,对实施方式4的物体识别装置进行说明。
4-1.实施方式4涉及的物体识别装置的概要
在实施方式3涉及的物体识别装置中,设成了基于作为车辆的周边环境条件的降雨量条件进行容许度映射选定处理。在此,从摄像头22获得的图像数据不仅会根据降雨量而变化,例如还会根据周边的明亮度等而变化。例如,在隧道内和/或夜间等昏暗环境下,未检测到行人等物体的情况可能会增加。因此,在考虑将物体识别处理根据车辆周边的明亮度进行优化的情况下,无法由单一的容许度映射来应对。
实施方式4涉及的物体识别装置10保有与车辆周边的照度条件相关联的多个容许度映射。在实施方式4涉及的物体识别装置10的容许度映射选定处理中,基于车辆周边的照度选定最佳容许度映射。多个容许度映射例如包括在照度在预定的阈值以上的情况下所选择的第一容许度映射、和在照度低于阈值量的情况下所选择的第二容许度映射。例如,与第二容许度映射相比,第一容许度映射能够将对于同一物体的容许度设定得较低。在容许度映射选定处理中,处理器30选定与检测出的照度对应的容许度映射。由此,能够降低与车辆周边的明暗状态相应的未检出风险。
4-2.实施方式4涉及的物体识别装置的构成
图14是用于说明实施方式4涉及的物体识别装置的构成的框图。除一部分构成之外,实施方式4涉及的物体识别装置10与图1所示的实施方式1的物体识别装置10基本相同。因此,在此以与图1所示的实施方式1的物体识别装置10的不同点为中心进行说明,并省略关于共通的要素的详细说明。
对于实施方式4涉及的物体识别装置10,连接有照度传感器70。照度传感器70例如搭载于车辆的挡风玻璃,输出与作为车辆的周边环境条件的照度条件相应的信号。此外,照度传感器70的构造没有限定。照度传感器70能够采用检测照度的各种公知的构造。另外,存储装置40所保存的容许度信息44中包含有与照度条件相关联的多个容许度映射。
图15是表示实施方式4涉及的物体识别装置用于进行容许度映射选定处理的功能的框图。实施方式4涉及的容许度映射选定处理由照度运算部140以及容许度映射选定部142实现。照度传感器70的输出信号被输入到照度运算部140。照度运算部140基于所输入的输出信号,推定车辆周边的照度。将推定出的照度输出到容许度映射选定部142。
容许度映射选定部142判定所输入的照度是否在预定的阈值以上。而且,容许度映射选定部142在所输入的照度在预定的阈值以上的情况下,从容许度信息44所包含的多个容许度映射中选定第一容许度映射。另一方面,容许度映射选定部142在所输入的照度低于预定的阈值的情况下,从容许度信息44所包含的多个容许度映射中选定第二容许度映射。在物体识别处理中,在容许度映射选定部142中选定的容许度映射被利用于计算似然阈值。
根据按以上的步骤所进行的容许度映射选定处理,能够在物体识别处理中使用根据车辆周边的照度所选择的容许度映射。由此,能够使由车辆周围的明亮度带来的影响反映于物体检测,因此,能够提高物体的辨别率而不增加物体的误检测率。
4-3.实施方式4涉及的物体识别装置的变形例
实施方式4涉及的物体识别装置10能够应用如下进行变形得到的构成。
多个容许度映射只要是由与不同的照度条件相关联的至少2个以上的容许度映射构成的,其内容没有限定。例如,容许度映射也可以构成为与昼间、傍晚、夜间等3个以上的不同的照度条件相关联的多个容许度映射。
- 主动式物体识别方法、物体识别装置以及物体识别系统
- 物体识别装置、物体识别方法以及物体识别程序