一种基于离散点计算的卫星天线指向角正确性的验证方法
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及一种基于离散点计算的卫星天线指向角正确性的验证方法,尤其涉及一种卫星天线指向控制软件地面测试方法,适用于倾斜地球同步轨道导航卫星反射面天线指向控制功能的验证和评估。
背景技术
北斗三号倾斜地球同步轨道导航卫星反射面天线具备三类目标的指向功能:地面站、地面运动目标、近地轨道目标。在综合测试阶段,为实现天线指向控制功能正确性验证,地面需要进行天线指向全过程仿真,为卫星天线的控制功能算法评测提供可比对数据。目前已有的仿真工具平台存在以下局限性:
1)仿真数据不支持与星上的遥测数据在同一时间系统下比对。例如常用的商业仿真平台卫星工具包(STK),该平台可以实现天线指向计算的连续动态仿真,然而其内部时间系统与北斗时间系统并不一致,并且卫星遥测更新频率与STK内部数据更新频率也存在差异,星地同步仿真验证难以开展。
2)分段验证天线驱动功能,忽略数据驱动下天线实时响应的准确性。卫星天线指向控制功能涉及多个单机。机载计算机实时计算天线指向角度,角度值实时传输至天线伺服控制器,最后由天线伺服控制器输出给驱动电机控制信号。目前缺乏工具将天线指向全过程仿真,包括指向规划计算、信息流传递、天线指向角度生成等,测试时仅能分段验证各功能的正确性,分段验证可能导致测试时未能及时发现数据传递错误,导致卫星在轨损失。
3)输入数据星地不统一,测试用例设计难度大。由于三类指向目标的上注参数信息类型不同,现有的平台功能集成度和工程适应性较低,用例设计时需要不断转换输入、输出参数,不能快速、灵活地适应多类型目标的测试验证需求,进而降低测试效率。
由以上分析可知,有必要提供一种突破星地同步约束,实现天线指向功能全流程计算结果比对、并匹配用例设计需求的测试方法。
发明内容
本发明所要解决的技术问题:克服现有技术的不足,提出一种基于离散点计算的卫星天线指向角正确性的验证方法,该方法以同一参考时刻卫星与目标运动轨迹的离散点位置信息驱动,构建仿真平台对卫星天线指向功能进行全流程模拟,实现天线指向控制过程的星地数据比对,并满足测试用例设计需求。
本发明的技术方案:
一种基于离散点计算的卫星天线指向角正确性的验证方法,该方法的步骤包括:
(1)构建仿真平台;
(2)将卫星天线指向目标参数输入到仿真平台;
当卫星天线指向目标为地面站时,目标参数为大地坐标,同时仿真平台将接收到的地面目标的大地坐标转换成地固系下地面目标坐标;
当卫星天线指向目标为地面运动目标时,目标参数为地面运动目标离散点大地坐标及对应时刻,同时仿真平台将接收到的地面运动目标的大地坐标转换成地固系下地面运动目标坐标,仿真平台根据地面运动目标的离散点大地坐标及对应时刻计算出目标速度,并将速度转换为地固系下三轴速度分量;
当卫星天线指向目标为近地轨道目标时,目标参数为参考时刻的轨道六根数;
(3)将步骤(2)得到的地固系下地面站坐标、地固系下地面运动目标坐标、速度分量和离散点坐标对应时刻或者是近地轨道目标的参考时刻的轨道六根数上注给卫星;
(4)卫星下传参考时刻天线指向角度理论值、参考时刻伺服控制器输出角度、参考时刻卫星轨道六根数和参考时刻卫星姿态信息至数据库中进行存储;
(5)将数据库中存储的参考时刻卫星轨道六根数和参考时刻卫星姿态输入到仿真平台;
(6)仿真平台根据步骤(2)中输入到仿真平台的目标的坐标信息与步骤(5)中输入到仿真平台的参考时刻卫星轨道六根数和参考时刻卫星姿态信息进行计算,输出天线指向角度理论值和伺服控制器输出角度理论值;
(7)将步骤(4)中数据库中存储的卫星下传的参考时刻天线指向角度理论值和参考时刻伺服控制器输出角度与步骤(6)中仿真平台输出的天线指向角度理论值和伺服控制器输出角度理论值进行比对,即将步骤(4)中数据库中存储的卫星下传的参考时刻天线指向角度理论值a1与步骤(6)中仿真平台输出的天线指向角度理论值a2进行比对,当a1与a2的差值的绝对值小于等于设计精度指标时,则卫星天线指向角理论值正确,当a1与a2的差值的绝对值大于设计精度指标时,则卫星天线指向角理论值不正确;
将步骤(4)中数据库中存储的卫星下传的参考时刻伺服控制器输出角度b1与步骤(6)中仿真平台输出的伺服控制器输出角度理论值b2进行比对,当b1与b2的差值的绝对值小于等于设计精度指标时,则伺服控制器输出角正确,当b1与b2的差值的绝对值大于设计精度指标时,则伺服控制器输出角不正确;
当卫星天线指向角度理论值不正确或卫星伺服控制器输出角度不正确,则根据仿真平台输出的天线指向角度理论值、伺服控制器输出角度理论值对卫星天线的指向角规划设计进行指导。
所述的仿真平台包括空间矩阵向量运算模块、时间转换模块、坐标转换模块、姿态运算模块、指向任务规划模块、卫星信息模块和人机交互界面;
所述的空间矩阵向量运算模块用于提供矩阵运算函数和向量运算函数,这些函数作为运算的基础,供坐标转换模块、指向任务规划模块、姿态运算模块、调用;矩阵运算函数包括矩阵与矩阵的乘法、矩阵与矩阵的加法、矩阵与数的乘法、矩阵转置、三维矩阵旋转等;向量运算函数包括求两向量的内积、求两向量的外积、求两向量的和、求两向量的夹角、求向量的模、求向量的单位向量、向量旋转等;
所述的时间转换模块用于接收卫星信息模块传输的目标参考时刻的北斗时,并将接收到的北斗时转换为J2000惯性系历元时,最后将J2000惯性系历元时输出给坐标转换模块,作为坐标转换模块的输入之一;
所述的坐标转换模块用于接收时间转换模块输出的J2000惯性系历元时,并根据接收到的J2000惯性系历元时计算非近地轨道目标的地固系坐标及速度分量,将卫星和目标的坐标统一转换至J2000惯性系下,并将坐标转换结果输出给卫星信息模块,坐标转换模块还用于接收卫星信息模块传输的目标的参数信息以及参考时刻卫星的轨道六根数;
所述的姿态运算模块用于接收卫星信息模块传输的参考时刻卫星姿态信息,卫星姿态信息包括欧拉角和四元数,并将接收到的参考时刻卫星姿态信息转换为姿态矩阵,再输出给卫星信息模块;
所述的指向任务规划模块用于将卫星在J2000惯性系下坐标、目标在J2000惯性系下坐标、卫星的姿态矩阵作为输入,计算天线指向角度。同时依据地球球形特征,计算卫星是否可见目标。指向任务规划模块将计算的天线指向角度理论值、伺服控制器输出角度的仿真结果传输给卫星信息模块;
所述的卫星信息模块用于传输给时间转换模块目标参考时刻的北斗时、用于接收坐标转换模块输出的坐标转换结果、用于接收姿态运算模块输出的姿态矩阵、还用于传输给姿态运算模块参考时刻卫星姿态信息、用于接收指向任务规划模块输出的天线指向角度理论值和伺服控制器输出角度值的仿真结果,还用于接收人机交互界面读取的目标参数信息和遥测数据,并将接收到的天线指向角度理论值和伺服控制器输出角度值输出给人机交互界面;
所述的人机交互界面用于读取目标参数、卫星参考时刻北斗时遥测、卫星参考时刻轨道遥测和卫星参考时刻姿态遥测并传递给卫星信息模块;输出天线指向角度理论值和伺服控制器输出角度的仿真结果,并与卫星下传的参考时刻天线指向角度理论值、参考时刻伺服控制器输出角度进行数据比对,自动生成判读结论。
仿真平台的仿真过程为:
当目标参数为A1,卫星轨道六根数为B1,参考时刻北斗时为C1,卫星姿态信息为D1,卫星天线指向角度理论值为E1、卫星伺服控制器输出角度为F1时。人机交互界面读取A1、B1、C1、D1、E1、F1,传递给卫星信息模块。卫星信息模块传递C1至时间转换模块,时间转换模块将C1转换为J2000惯性系历元时间C2。卫星信息模块传递D1至姿态运算模块,姿态运算模块将D1转换为卫星姿态矩阵D2。卫星信息模块传递C2、A1、B1至坐标转换模块,坐标转换模块分别计算卫星和目标在J2000惯性系下的坐标。
当目标为地面站或地面运动目标时,坐标转换模块根据C2,将A1转换为地固系坐标A2,并输出至人机交互界面,完成预处理。再将A2转换为J2000惯性系坐标A3;当目标为近地轨道目标时,坐标转换模块直接将A1转换为J2000惯性系坐标A3。坐标转换模块将B1转换为J2000惯性系坐标B2。计算结果A3、B2传输至卫星信息模块。
卫星信息模块传递A3、B2、D2至指向任务规划模块,计算得到天线指向角度仿真值E2、伺服控制器输出角度仿真值F2。卫星信息模块输出E2、F2至人机交互界面,并分别与E1、F1做差,得到误差G1、G2,根据G1、G2与设计指标精度的比对结果,给出判读结论。
本发明的有益效果:
(1)本发明以参考时刻的天线指向角度进行卫星、地面数据比对,解决测试与仿真难以实时验证的问题,并以此为思路设计了仿真平台,该平台可基于真实遥测数据模拟卫星天线指向过程,满足综合测试需求,具有较好的工程应用价值。
(2)本发明实现了卫星天线指向算法全流程模拟,解决了多接口数据传输一致性验证问题,如存在软件接口设计错误,能够快速定位。
(3)本发明明确了天线指向测试用例的设计方法,涵盖三类指向目标且匹配卫星运用的数据类型。针对实际测试需求,构建的仿真平台具备数据预处理、测试结果自动比对、自动判读的功能,提高了测试用例设计效率及灵活性。
附图说明
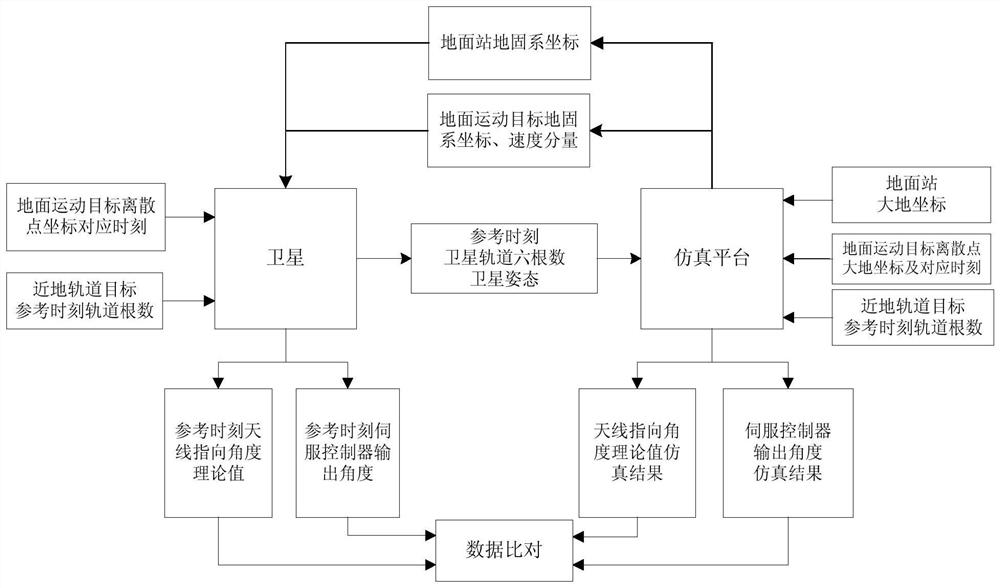
图1本发明的测试方法流程示意图;
图2本发明构建的仿真平台组成框图;
图3赤道惯性坐标系下卫星轨道要素,Υ-春分点,N-卫星轨道的升交点S-卫星位置,P-卫星轨道的近地点,Ω-升交点赤经,ω-近地点幅角,f—真近点角,i-轨道倾角,e-偏心率矢量,从地心指向近地点,长度为e,W-轨道平面法线的单位矢量,r-卫星向径;
图4卫星本体系下天线波束指向角定义;
图5天线坐标系下天线指向角定义。
具体实施方式
一种基于离散点计算的卫星天线指向角正确性的验证方法,步骤包括:
(1)构建仿真平台;
(2)将卫星天线指向目标参数输入到仿真平台;
(3)将步骤(2)得到的地固系下地面站坐标、地固系下地面运动目标坐标、速度分量和离散点坐标对应时刻或者是近地轨道目标的参考时刻的轨道六根数上注给卫星;
(4)卫星下传参考时刻天线指向角度理论值、参考时刻伺服控制器输出角度、参考时刻卫星轨道六根数和参考时刻卫星姿态信息至数据库中进行存储;
(5)将数据库中存储的参考时刻卫星轨道六根数和参考时刻卫星姿态输入到仿真平台;
(6)仿真平台根据步骤(2)中输入到仿真平台的目标的坐标信息与步骤(5)中输入到仿真平台的参考时刻卫星轨道六根数和参考时刻卫星姿态信息进行计算,输出天线指向角度理论值的仿真结果和伺服控制器输出角度的仿真结果;
(7)将步骤(4)中数据库中存储的卫星下传的参考时刻天线指向角度理论值和参考时刻伺服控制器输出角度与步骤(6)中仿真平台输出的天线指向角度理论值的仿真结果和伺服控制器输出角度的仿真结果进行比对;
(8)根据步骤(7)得到的比对结果,当卫星天线指向角度理论值不正确或卫星伺服控制器输出角度不正确,则根据仿真平台输出的天线指向角度理论值的仿真结果、伺服控制器输出角度的仿真结果对卫星天线的指向角规划设计进行指导。
所述的步骤(2)中,当卫星天线指向目标为地面站时,目标参数为大地坐标,同时仿真平台将接收到的地面目标的大地坐标转换成地固系下地面目标坐标;当卫星天线指向目标为地面运动目标时,目标参数为地面运动目标离散点大地坐标及对应时刻,同时仿真平台将接收到的地面运动目标的大地坐标转换成地固系下地面运动目标坐标,仿真平台根据地面运动目标的离散点大地坐标及对应时刻计算出目标速度,并将速度转换为地固系下三轴速度分量;当卫星天线指向目标为近地轨道目标时,目标参数为参考时刻的轨道六根数。
所述的步骤(7)中,将步骤(4)中数据库中存储的卫星下传的参考时刻天线指向角度理论值a1与步骤(6)中仿真平台输出的天线指向角度理论值的仿真结果a2进行比对,当a1与a2的差值的绝对值小于等于设计精度指标时,则卫星天线指向角度理论值正确,当a1与a2的差值的绝对值大于设计精度指标时,则卫星天线指向角度理论值不正确。
所述的步骤(7)中,将步骤(4)中数据库中存储的卫星下传的参考时刻伺服控制器输出角度b1与步骤(6)中仿真平台输出的伺服控制器输出角度的仿真结果b2进行比对,当b1与b2的差值的绝对值小于等于设计精度指标时,则伺服控制器输出角度正确,当b1与b2的差值的绝对值大于设计精度指标时,则伺服控制器输出角度不正确。
所述的步骤(1)中,如图2所示,仿真平台包括空间矩阵向量运算模块、时间转换模块、坐标转换模块、姿态运算模块、指向任务规划模块、卫星信息模块和人机交互界面。
所述的空间矩阵向量运算模块用于提供矩阵运算函数和向量运算函数,这些函数作为运算的基础,供坐标转换模块、指向任务规划模块、姿态运算模块、调用;矩阵运算函数包括矩阵与矩阵的乘法、矩阵与矩阵的加法、矩阵与数的乘法、矩阵转置、三维矩阵旋转等;向量运算函数包括求两向量的内积、求两向量的外积、求两向量的和、求两向量的夹角、求向量的模、求向量的单位向量和向量旋转。
所述的时间转换模块用于接收卫星信息模块传输的卫星参考时刻的北斗时,并将接收到的北斗时转换为J2000惯性系历元时,最后将J2000惯性系历元时输出给坐标转换模块,作为坐标转换模块的输入之一;
所述的坐标转换模块用于接收卫星信息模块传输的非近地轨道目标参数信息,将接收到的非近地轨道目标的大地坐标转换为地固系坐标、计算目标地固系下的速度分量;用于接收时间转换模块输出的J2000惯性系历元时,并根据接收到的J2000惯性系历元时计算非近地轨道目标的惯性系坐标;用于接收卫星信息模块传输的参考时刻卫星轨道六根数和参考时刻近地轨道目标六根数,将卫星和近地轨道目标的坐标统一转换至J2000惯性系下;用于将转换后的目标地固系坐标、目标J2000惯性系坐标、卫星惯性系坐标和计算的目标地固系下速度分量输出给卫星信息模块;
所述的姿态运算模块用于接收卫星信息模块传输的参考时刻卫星姿态信息,卫星姿态信息包括欧拉角和四元数,并将接收到的参考时刻卫星姿态信息转换为姿态矩阵,再输出给卫星信息模块。
所述的指向任务规划模块用于将卫星在J2000惯性系下坐标、目标在J2000惯性系下坐标、卫星的姿态矩阵作为输入,计算天线指向角度;同时依据地球球形特征,计算卫星是否可见目标;指向任务规划模块将计算的天线指向角度理论值的仿真结果、伺服控制器输出角度的仿真结果传输给卫星信息模块;
所述的卫星信息模块用于传输给时间转换模块卫星参考时刻的北斗时、用于接收坐标转换模块输出的目标地固系坐标和地固系下速度分量;用于接收坐标转换模块输出的卫星和目标的J2000惯性系坐标,输出给指向任务规划模块;用于接收姿态运算模块输出的姿态矩阵,输出给指向任务规划模块;还用于传输给姿态运算模块参考时刻卫星姿态信息、用于接收指向任务规划模块输出的天线指向角度理论值的仿真结果和伺服控制器输出角度的仿真结果,还用于接收人机交互界面输入的目标参数信息和卫星遥测数据,并将接收到的目标地固系坐标、地固系下速度分量、天线指向角度理论值的仿真结果和伺服控制器输出角度的仿真结果输出给人机交互界面。
所述的人机交互界面用于读取目标参数信息、卫星参考时刻北斗时遥测、卫星参考时刻轨道六根数遥测和卫星参考时刻姿态遥测并传递给卫星信息模块;输出天线指向角度理论值的仿真结果和伺服控制器输出角度的仿真结果,并与卫星下传的参考时刻天线指向角度理论值、参考时刻伺服控制器输出角度进行数据比对,自动生成判读结论。
仿真平台的仿真过程为:
当目标参数为A1,卫星轨道六根数为B1,参考时刻北斗时为C1,卫星姿态信息为D1,卫星天线指向角度理论值为E1、卫星伺服控制器输出角度为F1时;人机交互界面读取A1、B1、C1、D1、E1、F1,传递给卫星信息模块;卫星信息模块传递C1至时间转换模块,时间转换模块将C1转换为J2000惯性系历元时间C2;卫星信息模块传递D1至姿态运算模块,姿态运算模块将D1转换为卫星姿态矩阵D2;卫星信息模块传递C2、A1、B1至坐标转换模块,坐标转换模块分别计算卫星和目标在J2000惯性系下的坐标;
当目标为地面站或地面运动目标时,坐标转换模块根据C2,将A1转换为地固系坐标A2,并输出至人机交互界面,完成预处理;再将A2转换为J2000惯性系坐标A3;当目标为近地轨道目标时,坐标转换模块直接将A1转换为J2000惯性系坐标A3;坐标转换模块将B1转换为J2000惯性系坐标B2;计算结果A3、B2传输至卫星信息模块;
卫星信息模块传递A3、B2、D2至指向任务规划模块,计算得到天线指向角度仿真值E2、伺服控制器输出角度仿真值F2;卫星信息模块输出E2、F2至人机交互界面,并分别与E1、F1做差,得到误差G1、G2,根据G1、G2与设计指标精度的比对结果,给出判读结论。
下面结合附图和实施例对本发明作进一步说明。
实施例
如图1所示,一种基于离散点计算的卫星天线指向角正确性的验证方法,步骤包括:
(1)地面目标参数预处理
向仿真平台输入地面目标大地坐标
式(1)中
式(2)中,a
对于地面运动目标,仿真平台根据其离散时刻位置,构建链表,计算出地固坐标系下,目标速度分别在三轴的分量(V
开启卫星指向控制功能:上注预处理后的目标信息,并开启卫星指向控制功能,地面数据库同步存储遥测信息。
(2)仿真平台参数配置
卫星天线指向功能结束后,向仿真平台导入地面数据库内存储的遥测信息,包括目标参数、卫星参考时刻北斗时、卫星参考时刻轨道根数、卫星参考时刻姿态信息、卫星参考时刻天线指向角度理论值和参考时刻伺服控制器输出角度。遥测数据文件导入至平台后将自动进行测试参数配置,配置完毕后,开启指向角度仿真计算。
(3)惯性系下地面目标坐标转换
进行天线指向计算前,需要将目标参数转化为J2000惯性系下坐标信息。地固系下p到惯性系p’的表达式为:
p'=(PR)
上式中,EP为极移,ER地球自转方向,NR为章动,PR为岁差,各个矩阵的表达式如下:
EP=R
ER=R
NR=R
PR=R
其中R
由于极移一般不超过0".8,计算时忽略其影响,式(5)中,S
式(8)中Δμ为赤经岁差章动,计算公式如式(13)所示,
岁差模型采用IAU1976,式(7)中,ξ
章动包括黄经章动ΔΨ、赤经章动Δμ、赤纬章动Δθ、交角章动Δε,章动序列采用IAU1980,与日月引力有关的项共106项,其表达式如下:
式(11)序列中,α
其表达式如下:
相应的赤经和赤纬章动Δμ和Δθ为:
Δμ=Δψcosε (13)
Δθ=Δψsinε (14)
其中黄赤交角的计算公式如下:
ε=84381.448”-46.8150”t-0.00059”t
式(9)至式(15)中,t为自标准历元J2000起算的儒略世纪数,其计算公式为:
(4)惯性系下卫星及近地轨道目标坐标转换
卫星及近地轨道信息由参考时刻t
定义地心轨道坐标系Ox
x
上式中,r为卫星的向径长度。进一步可推导出卫星在惯性系下的坐标为:
计算时,真近点角f由t
(5)本体系下天线波束指向矢量计算
已知指向目标某时刻惯性系下坐标为(x‘,y’,z′)
v=(v
式(18)中R
R
设卫星当前滚动角、俯仰角、偏航角分别为
则本体系下天线波束指向矢量为:
(6)天线波束指向角度计算
定义卫星本体系下表征天线波束轴指向矢量的β和α角为天线指向角,如图4所示.其中,β为天线指向中心角,是天线波束轴指向矢量v’与卫星本体系+Z轴的夹角,理论范围为[0°,90°]。
α为天线指向方位角,是天线波束轴指向矢量v’在卫星本体系XOY平面内的投影与卫星本体系+X轴的夹角。按右手螺旋定则规定正方向。理论范围为[-180°,180°)。
天线波束指向角理论值表达式为:
式(21)计算结果可验证星载计算机的计算结果的正确性。
(7)天线伺服控制器输出角度计算
倾斜地球同步轨道导航卫星反射面天线采用X-Y型天线座,具有X、Y两个转轴,两个转轴互相垂直。定义天线坐标系,以X轴电机轴线为坐标系X轴、以Y轴电机轴线为坐标系Y轴、以质心指向反射面为Z轴。天线安装坐标系与星体坐标系三轴方向一致,不需再进行坐标旋转变换,则v’在天线坐标系下的位置如图5所示,其中α’为绕X轴转过的角度、β’为绕Y轴转过的角度。则伺服控制器输出的指向角度α’、β’表达式为:
式(22)计算结果可验证卫星伺服控制器输出角度的正确性。
(8)测试结果自动比对及判读
仿真计算结束后,平台将输出卫星实际转角与仿真转角的误差曲线,通过设置指向精度指标范围,仿真平台将对测试结果进行自动判读。
本发明中未说明部分属于本领域的公知技术。
- 一种基于离散点计算的卫星天线指向角正确性的验证方法
- 一种基于身份的云服务器计算正确性验证方法