关节机器人的线缆引导装置
文献发布时间:2023-06-19 10:22:47
技术领域
本公开的各种实施方式涉及保护设置在嵌有线缆的多关节机器人中在基座中的线缆的引导装置。
背景技术
各种类型的工业6轴多关节机器人已针对自动化/无人操作工厂被开发,并已迅速安装在各种制造场所。
根据布线类型,工业6轴多关节机器人可以分为具有暴露于外部的各种线缆的外部布线机器人和具有嵌入在机器人主体中的线缆的内部布线机器人。
发明内容
技术问题
然而,因为外部安装的线缆增大了操作半径,从而需要确保更大的操作空间,所以外部布线机器人具有关于操作空间的利用度降低的问题。
此外,在内部布线机器人的情况下,可以容易地确保操作空间,但是集成在机器人的狭窄主体中的线缆在机器人关节操作期间引起与主体的摩擦。因此,没有用于减轻摩擦的结构/机械装置的内部布线机器人相对于外部布线机器人可能在线缆寿命方面是非常不利的。
本公开的各种实施方式可以提供与内部布线的多关节机器人相结合的具有安装在单轴基座(最大数量的线缆延伸穿过该单轴基座)中的可移动摩擦减小机构的线缆引导装置,从而降低线缆断开的风险并最大程度延长机器人线缆的使用寿命。
本公开的各种实施方式可以提供采用普通线缆保护管代替高刚性保护管的线缆引导装置,从而降低成本并减小基座尺寸。
技术方案
根据本公开的各种实施方式的一种线缆引导装置可以包括:基座;一个或更多个旋转臂,以关节形式可旋转地联接到基座;一个或更多个线缆,经由基座连接到旋转臂;线缆引导块,联接到基座中的驱动器;滑动槽,设置在线缆引导块的外周表面上;以及线缆摩擦减小机构,联接到容纳在基座中的线缆的部分,并配置为随着旋转臂旋转而在滑动槽中与线缆的所述部分一起旋转。
有益效果
本公开可以降低与嵌有线缆的多关节机器人相关的线缆断开的风险。
此外,本公开采用与嵌有线缆的多关节机器人相结合的摩擦减小机构,使得可以使用便宜的线缆保护管,从而降低成本。
附图说明
图1是示出根据本公开的各种实施方式的多关节机器人的透视图。
图2是示出根据本公开的各种实施方式的基座的内部构造的剖视图。
图3a是示出根据本公开的各种实施方式的设置在基座中的线缆的状态的透视图。
图3b和图3c是示出根据本公开的各种实施方式的其中线缆受到摩擦减小机构保护的状态并且基座被省略的透视图。
图3d和图3e是示出根据本公开的各种实施方式的其中线缆受到摩擦减小机构保护的状态并且基座的内壁被省略的透视图。
图3f是示出根据本公开的各种实施方式的处于容纳受到摩擦减小机构保护的线缆的状态的基座的透视图。
图4a是示出根据本公开的各种实施方式的第一线缆保护构件的透视图。
图4b是示出根据本公开的各种实施方式的可移动线缆引导件的透视图。
图4c是示出根据本公开的各种实施方式的第二线缆保护构件的透视图。
图4d是示出根据本公开的各种实施方式的线缆引导块的透视图。
图5是示出根据本公开的各种实施方式的可移动线缆引导件的安装状态的剖视图。
图6是示出根据本公开的各种实施方式的第一线缆保护构件的安装状态的透视图。
具体实施方式
在下文中,将参照附图描述本公开的各种实施方式。因此,本领域普通技术人员将认识到,在不背离本公开的范围和精神的情况下,可以对在这里描述的各种实施方式进行修改、等同和/或替换。关于附图的描述,相似的部件可以由相似的附图标记标识。
图1是示出根据本公开的各种实施方式的多关节机器人的透视图。
参照图1,根据各种实施方式的多关节机器人10是6轴多关节机器人,并且可以安装多个多关节机器人10以用于工厂自动化或各种制造领域的无人操作过程。多关节机器人可以根据线缆布线方式而分为各种线缆暴露于外部的外部布线机器人和线缆嵌入机器人主体中的内部布线机器人,根据各种实施方式的多关节机器人10可以是内部布线机器人。多关节机器人10的电源可以通过被布线的线缆电连接到多个旋转臂12至14的驱动器(未示出)和操作装置16。所提及的线缆(例如,图3a的线缆30)可以是提供在线缆保护管中的线缆。
根据各种实施方式的多关节机器人10可以包括基座11以及可旋转地连接到基座11的一个或更多个旋转臂12至15。操作装置16可以联接到旋转臂12至15之中最后的旋转臂15以执行期望的操作。例如,多关节机器人10可以包括根据旋转臂的数量具有四个轴或六个轴或更多轴的多关节机器人。
根据各种实施方式的旋转臂可以包括:第一旋转臂12,相对于基座11绕第一铰链轴h1旋转;第二旋转臂13,相对于第一旋转臂12绕第二铰链轴h2旋转;第三旋转臂14,相对于第二旋转臂13绕第三铰链轴h3旋转;第四旋转臂15,相对于第三旋转臂14绕第四铰链轴h4旋转;以及操作装置16,相对于第四旋转臂15绕第五铰链轴h5旋转。未示出的驱动马达被安装在基座11上,并且该驱动马达通过减速齿轮113连接到第一旋转臂12,使得基座11以预定角度或更小角度旋转。例如,第一旋转臂12可以相对于基座11以(-)175度至(+)175度旋转。
图2是示出根据本公开的各种实施方式的基座的内部构造的剖视图。
参照图2,在根据各种实施方式的多关节机器人(例如,图1的多关节机器人10)中,未示出的从外部连接器引出的线缆(例如,图3a的线缆30)在插入到基座11中之后应被朝向第一旋转臂(例如,图1的第一旋转臂12)引出。基座11是固定主体,第一旋转臂是旋转主体,从而可以在多关节机器人中安装用于保护容纳在基座11中的线缆(例如,图3a所示的线缆30)的一个或更多个线缆保护机构。
根据各种实施方式的基座11可以分为三个区域。例如,基座11可以包括上端区域110、下端区域114以及在上端区域110与下端区域114之间的中间区域112。基座11的下端区域114可以是固定部分,基座11的上端区域可以是旋转且第一旋转臂(例如,图1的第一旋转臂12)所联接的部分,基座11的中间区域112可以是随着上端区域110旋转而被施加线缆的拉伸的区域。
根据各种实施方式,可保护设置在三个区域110、112和114中的线缆30的一个或更多个机构可以被安装在多关节机器人10中。例如,该机构可以是用于保护线缆30免受第一旋转臂12的旋转影响的保护装置。
根据各种实施方式,驱动马达M、减速齿轮113、线缆(例如,图3a的线缆30)、可移动线缆引导件22(图3a的可移动线缆引导件22)、线缆引导块111、以及一个或更多个线缆保护构件21和23可以被容纳在基座11中。沿着第一铰链轴h1,基座11可以包括驱动马达M、线缆引导块111和减速齿轮113。
驱动马达M、线缆引导块111和减速齿轮113可以设置在同一轴上,并且可以设置为被堆叠。
第一线缆保护构件21可以根据各种实施方式设置在基座11的上端区域110中,第二线缆保护构件23可以设置在下端区域114中,并且可移动线缆引导件22可以在中间区域112中设置在基座11的内壁与引导块111之间。减速齿轮113可以通过多个接合构件与引导块111接合。附图标记1110可以表示设置在线缆引导块111的外周表面的至少一部分处的滑动槽。
根据各种实施方式,减速齿轮113可以联接到线缆引导块(例如,图2的线缆引导块111)的上端,并且线缆引导块的下端可以联接到基座11。根据线缆引导块111的联接结构,线缆引导块11可以用作适配器。例如,基座11的与线缆引导块111联接的部分可以是驱动马达M。
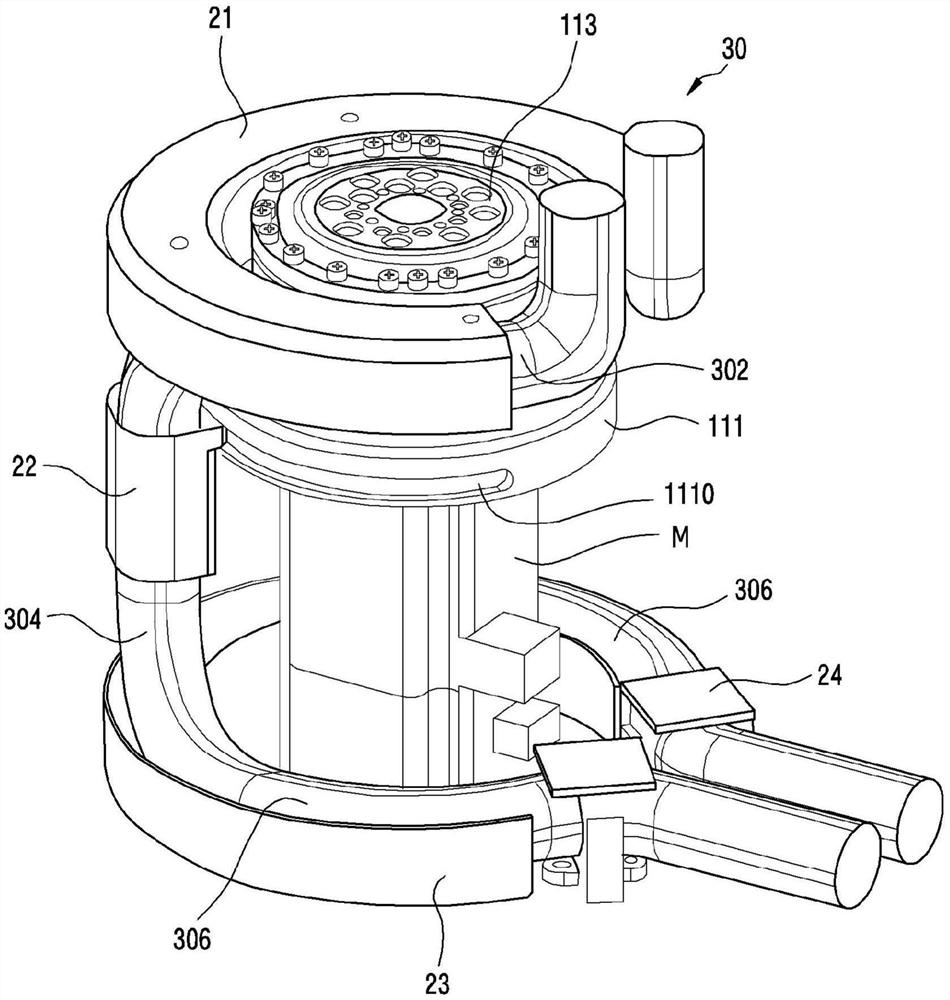
图3a是示出根据本公开的各种实施方式的设置在基座中的线缆的状态的透视图。图3b和图3c是示出根据本公开的各种实施方式的其中线缆受到摩擦减小机构保护的状态并且基座被省略的透视图。图3d和图3e是示出根据本公开的各种实施方式的其中线缆受到摩擦减小机构保护的状态并且基座的内壁被省略的透视图。图3f是示出根据本公开的各种实施方式的处于容纳受到摩擦减小机构保护的线缆的状态的基座的透视图。
参照图3a至图3f,根据各种实施方式的线缆30是电连接装置,并且可以被线缆保护管覆盖。一对线缆30可以在设置于基座11中之后朝向第一旋转臂12引出以彼此基本对称,并且可以在其中线缆30被容纳在基座11与驱动马达M之间的空间中的状态下朝向第一臂12被引出。
根据各种实施方式的线缆30可以包括容纳在基座11中的第一部分302至第三部分306。例如,当基座11的内部空间被分为上端区域(例如,图2的上端区域110)、下端区域(例如,图2的下端区域114)以及在上端区域与下端区域之间的中间区域(例如,图2的中间区域112)时,第一部分302可以被容纳在上端区域110中,第三部分306可以被容纳在下端区域114中,第二部分304可以被容纳在中间区域中。
例如,线缆的第一部分302是弯曲的,并且第一部分302的一端可以面对第一旋转臂以被引出到第一旋转臂中。第二部分304是直线形的,并且可以以竖直状态设置在基座的内部空间中。第三部分306是弯曲的,并且第三部分306的一端可以面对未示出的外部连接器,以被引出到基座11的外部。第一部分302与第二部分304之间可以设置弯曲部分,并且第二部分304与第三部分306之间可以设置弯曲部分。
根据各种实施方式的线缆30的第三部分306可以水平地设置在基座11的下端区域114中。第三部分306的一端可以弯曲以连接到第二部分304,该第二部分304直线形地面向竖直向上的方向。第二部分304的一端可以弯曲以呈弯曲形式水平地连接到第一部分302。
第一线缆保护构件21可以随着根据各种实施方式的第一旋转臂(例如,图1的第一旋转臂12)旋转而旋转,线缆的第一部分302可以随着第一线缆保护构件21旋转而旋转,第二部分304,也就是,处于第二部分304穿过移动线缆引导件22的状态的可移动线缆引导件22,可能由于线缆旋转的影响而沿着设置在线缆引导块111的外周表面上的滑动槽1110滑动并移动预定距离。然后,第二部分302可以受到可移动线缆引导件22保护。
根据各种实施方式的线缆的第一部分302可以连接到第一旋转臂12,并位于基座11的上端部分,并且可以是由于线缆的移动而被施加最强的向前摩擦力的部分,因为第一部分302的移动速度与第一旋转臂沿着第一轴的旋转速度相同,并且在第一至第三部分302、304和306之中,第一部分302移动得最快。
因为根据各种实施方式的线缆的第二部分304连接第一部分302和第三部分306,并且同时旋转和向前移动,所以由于旋转摩擦力和线缆的移动,向前的摩擦力可以被施加到第二部分304。第二部分304的移动速度可以是第一旋转臂沿着第一轴的旋转速度的大约一半。
根据各种实施方式的线缆的第三部分306可以位于基座11的下端区域114处,并且在第三部分306进入或离开第二部分304之前,第三部分306的一端可以连接到机器人的外部连接器以与控制器通信。第三部分306的移动速度为零,因此可以没有摩擦力。附图标记24表示保持构件,并且可以是固定第三部分306的一端的构件。
图4a是示出根据本公开的各种实施方式的第一线缆保护构件的透视图。
参照图4,根据各种实施方式的基座(例如,图1的基座11)可以进一步包括容纳线缆的第一部分302的第一线缆保护构件21。例如,第一线缆保护构件21是C形的,并与旋转框架接合以与旋转框架一起旋转,并且线缆的容纳在第一线缆保护构件21中的第一部分也可以旋转。例如,第一线缆保护构件21可以具有用于将第一保护构件21与旋转框架接合的多个接合孔210。
图4b是示出根据本公开的各种实施方式的可移动线缆引导件的透视图。
参照图4b,根据各种实施方式的可移动线缆引导件22可以包括设置为与基座11的内壁具有间隙的一端和插入到线缆引导块的滑动槽中的另一端。
根据各种实施方式的可移动线缆引导件22可以包括主体220和凸台222。孔224可以沿着主体220的纵向方向设置。孔224可以是线缆穿过的孔。线缆的第二部分304可以在穿过孔224的同时被设置。凸台222可以设置在主体220的一部分处并插入到滑动槽中。例如,凸台222可以设置在主体220的上端或中间部分处。
根据各种实施方式的凸台222可以包括具有一曲率的弯曲表面222a。弯曲表面222a可以接触滑动槽(例如,图2的滑动槽1110),并且可以在与滑动槽表面接触的同时在滑动槽中滑动。
根据各种实施方式的可移动滑动引导件22由工业合成树脂(例如,塑料)形成,并且可以由MC尼龙、乙酰基或特氟隆中的任何一种形成。球衬套可以附接到可移动线缆引导件22,使得当可移动线缆引导件22旋转时,球衬套的球接触第二部分304,从而可以使可移动线缆引导件22的旋转摩擦阻力最小化。球衬套可以是适合于线缆直径的商用球衬套。
图4c是示出根据本公开的各种实施方式的第二线缆保护构件的透视图。
参照图4c,根据各种实施方式的基座11可以包括第二线缆保护构件23,该第二线缆保护构件23设置为面对第一线缆保护构件(例如,图4a的第一线缆保护构件21)以容纳线缆的第三部分(例如,图3a的第三部分306)。例如,第二线缆保护构件23是C形的,并与基座11的底部接合,因此可以固定到基座11的底部。例如,第二线缆保护构件23可以具有用于将第二保护构件23与基座接合的多个接合孔230。
图4d是示出根据本公开的各种实施方式的线缆引导块的透视图。
参照图4d,根据各种实施方式的线缆引导块111具有联接到驱动马达(例如,图2的驱动马达M)的盘形,联接孔1112可以设置在线缆引导块111的中央,滑动槽1110可以设置在线缆引导块111的外周表面处。滑动槽110可以是可移动线缆引导件22的凸台(例如,图4b的凸台222)插入到其中以滑动的部分。联接凹陷1113可以设置在线缆引导块111的联接孔1112的周边以联接到驱动马达的上端,可以设置将要被联接到减速齿轮113的壳体的多个接合孔1114。
下面将描述具有参照图1至图4d描述的结构的多关节机器人的操作。
如果第一旋转臂(例如,图1的第一旋转臂12)旋转,则容纳在基座11的内部中的一对线缆(例如,图3a的线缆30)可以根据第一旋转臂沿着第一轴的旋转操作而反复地进入或离开不同的区域。可移动线缆引导件22可以用作用于减小随着线缆移动而产生的摩擦力的机构。
线缆的第二部分304在第二部分304被放入到可移动线缆引导件22中的状态下被不受约束地布线,并且被布线的第二部分304可以在第二部分304受到线缆引导件22保护的状态下根据线缆的移动而自由地移动。在第二部分304移动时产生的摩擦阻力可以改为被施加到可移动线缆引导件22。线缆的第三部分306以固定状态设置,但是第二线缆保护构件23可以设置为防止可由第二部分304产生的摩擦力。
图5是示出根据本公开的各种实施方式的可移动线缆引导件的安装状态的剖视图。
参照图5,根据各种实施方式的可移动线缆引导件22的至少一部分可以设置为与基座11的内壁11a具有间隙g,并且凸台222可以插入到滑动槽1110中同时与滑动槽1110表面接触以滑动。
可移动线缆引导件22的一部分可以在多关节机器人的操作期间沿着内壁11a滑动,凸台222可以在滑动槽1110上滑动。润滑剂被引入到基座的内壁11a与可移动滑动引导件22的一部分之间的区域a1或凸台222与滑动槽1110之间的区域a2,从而可移动滑动引导件22可以平滑地滑动和移动。图5是示出根据本公开的各种实施方式的可移动线缆引导件的安装状态的剖视图。
图6是示出根据本公开的各种实施方式的第一线缆保护构件的安装状态的透视图。
参照图6,根据各种实施方式的第一线缆保护构件21可以通过使用多个接合构件而联接到与第一旋转臂12联接的旋转框架120的底表面。
根据本公开的各种实施方式,用于多关节机器人(例如,图1所示的多关节机器人10)的线缆引导装置可以包括:基座(例如,图1的基座11);一个或更多个旋转臂(例如,图1的旋转臂12、13、14和15),以关节形式可旋转地连接到基座;一个或更多个线缆(例如,图3a的线缆30),经由基座连接到旋转臂;线缆引导块(例如,图2的线缆引导块111),联接到基座中的驱动器;滑动槽(例如,图2的滑动槽1110),设置在线缆导引块的外周表面上;以及线缆摩擦减小机构(例如,图3a的可移动线缆导引件22),联接到容纳在基座中的线缆的部分,并配置为随着旋转臂旋转而在滑动槽中与线缆的所述部分一起旋转。
根据本公开的各种实施方式,线缆摩擦减小机构可以具有孔,线缆的所述部分穿过该孔。
根据本公开的各种实施方式,线缆摩擦减小机构可以包括一个或更多个可移动线缆引导件(例如,图3a的可移动线缆引导件22)。
根据本公开的各种实施方式,线缆摩擦减小机构设置在基座的内壁(例如,图5的线缆的内壁11a)与线缆引导块之间,并通过线缆的拉伸(tension)而沿着线缆引导块的滑动槽移动。
根据本公开的各种实施方式,线缆中的每个可以包括:第一部分(例如,图3a的第一部分302),水平地设置在基座中;第二部分(例如,图3a的第二部分304),从第一部分的一端延伸并竖直地设置在基座中;以及第三部分(例如,图3a的第三部分306),从线缆的与第一部分相反的一端延伸,与第一部分相对,并水平地设置在基座中。
根据本公开的各种实施方式,可移动线缆引导件(图3b的可移动线缆引导件22)的一端可以设置为与基座的内壁(例如,图5的线缆的内壁11a)具有间隙,并且可移动线缆引导件的另一端可以插入到滑动槽(例如,图2的滑动槽1110)中以随着旋转臂旋转而沿滑动槽移动。
根据本公开的各种实施方式,可移动线缆引导件(例如,图3b的可移动线缆引导件22)可以包括:主体(例如,图4b的主体220),设置为使得线缆穿过的孔沿其纵向方向形成;以及凸台(例如,图4b的凸台222),设置在主体的一部分处并插入到滑动槽中。
根据本公开的各种实施方式,凸台(例如,图4b的凸台222)可以包括具有一曲率的弯曲表面(例如,图4b的弯曲表面222a),并且可以在滑动槽中滑动。
根据本公开的各种实施方式,基座可以进一步包括容纳第二部分的第一线缆保护构件(例如,图4a的第一线缆保护构件21),第一线缆保护构件(例如,图4a的第一线缆保护构件210)可以是C形的并且可以与旋转框架接合。
根据本公开的各种实施方式,基座可以进一步包括第二线缆保护构件(例如,图4c的第二线缆保护构件23),该第二线缆保护构件设置为面对第一线缆保护构件以容纳第三部分,第二线缆保护构件(例如,图4c的第二线缆保护构件23)可以是C形的并且可以与基座的底部接合。
根据本公开的各种实施方式,滑动槽(例如,图2的滑动槽1110)可以沿着线缆引导块的外周表面延伸。
根据本公开的各种实施方式,线缆可以受到线缆保护管保护。
根据本公开的各种实施方式,线缆(例如,图3a的线缆30)可以在第二部分和第三部分处弯曲并且可以在第一部分处是直线形的,第一部分与第二部分之间可以设置弯曲形状,并且第一部分与第三部分之间可以设置弯曲形状。
根据本公开的各种实施方式,线缆摩擦减小机构可以由合成树脂形成,该合成树脂是MC尼龙、乙酰基或特氟隆中的任何一种。
根据本公开的各种实施方式,减速齿轮(例如,图2的减速齿轮113)联接到线缆引导块(例如,图2的线缆引导块111)的上端,并且基座可以联接到线缆引导块的下端,从而线缆引导块用作适配器。
本公开的在说明书和附图中描述和示出的实施方式仅是用于理解本公开的技术内容的特定示例,而不旨在限制本公开的范围。因此,应被解释为,除了这里公开的实施方式之外,基于本公开的技术精神推导出的所有改变或修改都落入本公开的范围内。
- 关节机器人的线缆引导装置
- 被动关节装置、线缆引导件以及动力传递机构