一种具有三轴补偿机构的工件抓取装置
文献发布时间:2023-06-19 10:49:34
技术领域
本发明涉及一种具有三轴补偿机构的工件抓取装置,属于自动化设备技术领域。
背景技术
汽车底盘安装托盘作业中,会有不同种类或规格的底盘,需要机器人抓取不同的支点和拧紧点单元,更换到底盘支撑托盘的指定位置上,操作频率及数量大,实际工作环境中,存在底盘放置平台高低不平、抓取的底盘尺寸存在差异等问题,造成机械抓手无法顺利完成底盘工件的抓取工作。
发明内容
为解决现有技术存在的缺陷,本发明的目的是提供一种保证抓取工作能够顺利完成的具有三轴补偿机构的工件抓取装置。
本发明的技术方案是:一种具有三轴补偿机构的工件抓取装置,连接法兰连接机构连板,Z轴浮动补偿气缸连接机构连板,Z轴浮动补偿气缸的输出端连接滑块a,所述滑块a滑动连接位于立板上的导轨a,立板底部连接上板,上板上设有夹紧气缸a,夹紧气缸a连接相对设置的两个夹爪,T型连接件顶部位于两个所述夹爪之间,T型连接件与下板连接,下板上设有与导轨b滑动连接的滑块b,所述导轨b位于中板上,所述中板上设有导轨c,上板上的滑块c滑动连接于导轨c上,下板上固定有夹紧气缸b,夹紧气缸b通过连接板连接夹紧爪。
所述连接板与夹紧爪之间连接有加强连板a。
所述立板与上板之间连接有加强连板b。
所述T型连接件连接于下板侧中部。
所述Z轴浮动补偿气缸有两个,对称设置于机构连板上。
所述机构连板通过连接法兰连接工业机器人。
本发明的有益效果是:通过三轴上的浮动补偿,使抓手适应并消除存在的差异量,顺利完成抓取放置工作,增强抓手的稳定性,实现抓取的精确度,一个机械手上设置两套夹紧机构,提高抓取效率,节省节拍。
附图说明
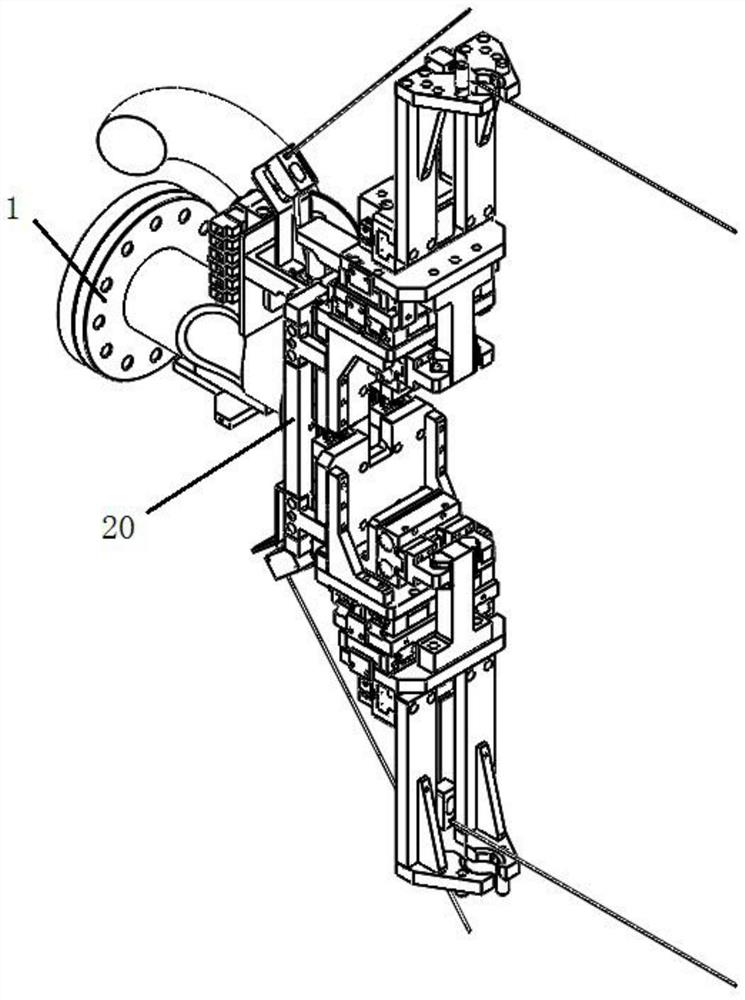
图1为本发明结构示意图;
图2为本发明局部放大图。
图中附图标记如下:1、连接法兰,2、Z轴浮动补偿气缸,3、立板,4、导轨a,5、上板,6、夹紧气缸a,7、夹爪,8、T型连接件,9、下板,10、导轨b,11、滑块b,12、中板,13、导轨c,14、滑块c,15、夹紧气缸b,16、连接板,17、夹紧爪,18、加强连板a,19、加强连板b,20、机构连板。
具体实施方式
下面结合附图1-2对本发明做进一步说明:
一种具有三轴补偿机构的工件抓取装置,连接法兰1连接机构连板20,Z轴浮动补偿气缸2连接机构连板20,Z轴浮动补偿气缸2的输出端连接滑块a,所述滑块a滑动连接位于立板3上的导轨a4,立板3底部连接上板5,上板5上设有夹紧气缸a6,夹紧气缸a6连接相对设置的两个夹爪7,T型连接件8顶部位于两个所述夹爪7之间,T型连接件8与下板9连接,下板9上设有与导轨b10滑动连接的滑块b11,所述导轨b10位于中板12上,所述中板12上设有导轨c13,上板5上的滑块c14滑动连接于导轨c13上,下板9上固定有夹紧气缸b15,夹紧气缸b15通过连接板16连接夹紧爪17。所述连接板16与夹紧爪17之间连接有加强连板a18。所述立板3与上板5之间连接有加强连板b19。所述T型连接件8连接于下板9侧中部。所述Z轴浮动补偿气缸2有两个,对称设置于机构连板20上。所述机构连板20通过连接法兰1连接工业机器人。
本发明工作原理如下:
夹取底盘工件前,夹紧气缸b15动作,使夹紧爪17处于张开状态,Z轴浮动补偿气缸2泄压停止工作,滑块a与导轨a之间可自由滑动,以实现在夹紧爪17靠近底盘工件时Z轴方向上的浮动补偿,抓取工件前夹紧气缸a6驱动夹爪7张开,使得T型连接件8在两个夹紧7之间可以在X向和Y向移动,即夹紧爪17可以在X向和Y向移动,实现在X向和Y向上的浮动补偿。机械手带动本装置靠近待夹取的底盘工件,若夹紧爪17在Z轴方向上过行程,滑块a与导轨a之间相对移动,使夹紧爪17在Z轴方向上移动补偿,若夹紧爪17在X轴和Y轴方向上存在位置误差,通过导轨b10、滑块b、导轨c13以及滑块c14间的补偿移动,消除夹紧爪17与待夹取底盘工件间的位置差异量,使得夹紧爪17可以顺利完成工件的夹取工作,夹紧爪17夹紧工件后离开工件存放位置时,夹紧气缸a6动作,使得夹爪7抱紧T型连接件8,使夹紧爪17回到X、Y轴方向上的初始位置,以便准确放置工件,机械手上对称设置有两个夹紧爪17,第一个夹紧爪17抓取工件后,Z轴浮动补偿气缸2动作,将滑块a顶紧固定在导轨a4上,机械手旋转180度,以方便第二个夹紧爪17进行抓取工作。两个夹紧爪17都抓取工件后,在机械手的带动下,使一个夹紧爪17移动到工件放置位置,移动到位的夹紧爪17松开,工件被放下,然后机械手继续移动,并同时旋转,使另一个还夹持工件的夹紧爪17运转到位,然后该夹紧爪17松开,将工件放下。一个机械手上安装两个夹紧爪17,提高抓取效率,节省节拍。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
- 一种具有三轴补偿机构的工件抓取装置
- 一种具有点胶补偿机构的三轴智能固化装置