一种腔体内膛轮廓测量系统的嵌套结构和误差校正方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及一种腔体的内膛轮廓测量系统的嵌套结构和误差校正方法,属于光电测量技术领域。
背景技术
电磁轨道发射器在单次发射过程中,脉冲大电流高速滑动电接触过程产生的各种损伤都会在轨道内膛留下不同的物理特征和现象,对轨道内膛形态的测量测试和研究分析,是分析各种损伤物理机理、解决损伤问题、评估发射器使用寿命的重要手段。
目前的内膛检测的光学测量装置主要是内窥镜方案和激光测量方案。内窥镜方案可提供电磁轨道发射器的内膛二维彩色损伤图像,而激光测量方案可提供三维立体的内膛轮廓建模。但是由于电磁轨道发射器一般长度都在10米甚至以上,所以其内膛轮廓测量装置与一般火炮的检测装置有所区别,不能采用外置设备观测,需要设计沿腔体内膛运动的特殊装置,对内膛轮廓进行相对独立的测量过程。
该测量装置需要考虑在轨道内的运行过程产生的误差。由于轨道本身是非规则形状,并且测量装置运动的表面也存在损伤的情况,所以测量装置在轨道内的运动过程不能保持准确的直线运动。装置会产生偏转,位移和绕轴向的旋转,这会引起系统误差以外的偶然误差。该误差会严重影响装置的测量精度,所以需要特定的结构和方法进行误差的检测和校正。
本发明中针对的测量方法是激光光学三角法,具有高精度、非接触的特点。激光光学三角法测量系统由光学三角头、运动控制、定位系统、数据显示及其分析系统组成。本发明提出一种通过标准体进行图像校准的校正方法和结构,对上述测量装置的偶然误差进行精确的校正。本发明的校正结构提供一个标准体,标准体的类型和规格可更换。利用激光三角系统扫描标准体结构,可获得标准体的轮廓信息,由于标准体的结构信息是已知的,所以可将该扫描的轮廓与标准体的已知结构进行比较,通过校正标准体的轮廓可计算出测量系统的运动偏离,将同样的校正过程应用到每一帧的光学三角法所得到的轮廓图中,即可获得校正后的轮廓,此方法可以有效校正由于测量系统在轨道内不规则运动产生的误差。
中国专利公开说明书CN105424724A公开了一种基于主动式全景视觉的火炮内膛疵病检测装置,利用沿火炮内膛爬行的主动式全景视觉传感器,采集火炮内膛全景图像和火炮内膛激光切片扫描全景图像。该装置虽然实现了主动测量,但其未涉及提到装置的准直方案,故对于测量结果会有一定偏差。同时该装置未涉及轴向位移量的测量,以往通过程序控制步进电机控制装置步进的方法精确较差,无法获得装置在身管的准确位置信息。
中国公开转了说明书CN108760768A公开了一种电磁轨道发射装置内膛自动扫描检测小车。车体的两侧设有横向导向轮,所述车体包括车体前段和车体后段,所述车体后段上设有激光扫描机构和高清摄像机构,所述激光扫描机构平行于内膛安装于所述车体上,用于发出线条细且明亮的线激光,所述车体前段上设有反射机构,所述反射机构的反射面用于反射所述激光扫描机构发出的线激光,使所述线激光垂直照射在所述导轨表面,所述高清摄像机构用于获取所述导轨表面的线激光,从而获得所述导轨的形貌点云,通过所述信号传输线将所述形貌点云传输回控制平台,并通过所述电机控制线控制所述电机驱动所述车体运动,从而获得所述导轨上下表面完整的三维点云数据。但是该装置没有涉及到小车在炮膛内的不规则运动导致的误差如何测量和校正的问题,这将会导致测量得到的三维图像存在较大的误差。
发明内容
基于以上分析,本发明目的是解决腔体内膛轮廓主动测量系统因在内膛中的运动而产生的偶然误差的检测和校正。
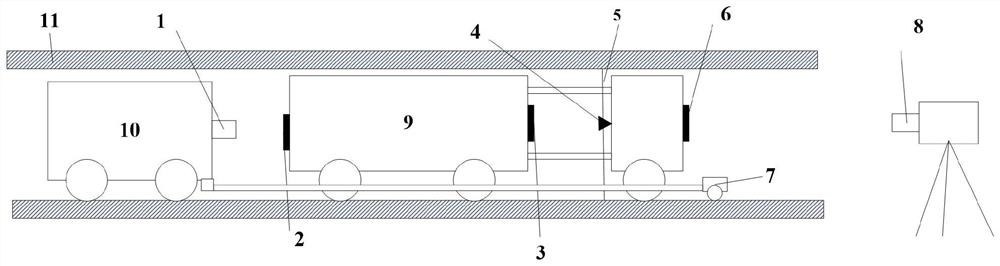
为达到上述目的,本发明提供了一种腔体的内膛轮廓测量系统的嵌套结构,如图1所示,包括设置在腔体(11)外部的全局激光装置、设置在腔体内部的测量装置以及测距装置,所述测量装置部分包括环形激光发生器(4)、抓取轮廓的图像传感器(3)、接收全局基准激光的图像传感器(6)、轴向测距的图像传感器(2),包含步进电机,单板电脑在内的控制平台和运动机构(9);所述轴向测距装置包括锥形光发生器(1)、包含步进电机在内的车载机构及其控制系统(10)以及使用刚体结构延伸到测量装置下的标准体(7);所述全局基准校对装置包括激光发生器(8);腔体的内膛轮廓系统的嵌套结构,通过该结构可以进行轨道内膛轮廓测量系统的偶然误差的检测和校正。
本发明所述测量装置与测距装置为嵌套结构,标准体与测距装置为一体化结构,并且通过刚性连接与测量装置嵌套。
腔体的内膛轮廓测量系统的误差校正方法如图2所示,当环形激光器扫过标准体并且被图像传感器抓取环形激光发生器打在腔体内壁表面的环形光束,可得到带标准体轮廓的内腔轮廓。内腔的横截面形状为(6),由于测量系统在轨道内不能保持直线运动,初始的图像传感器位置(2)甚至在某些异形内腔中可能产生多自由度的偏转(3),导致与标准体(5)的几何尺寸相比,通过测量系统绘制的标准体特征(4)产生畸变。畸变产生的原因主要是测量系统存在位置偏移和角度偏移以及轴向旋转。全局激光系统通过抓取测量装置在不同位置时平行光发生器打在图像传感器上的光斑图形,进而确定测量装置在不同时刻下的位置偏移量和角度偏移量。轴向测距系统通过抓取测量装置在不同位置时锥形光发生器打在图像传感器的光斑图形,进而确定测量装置在不同时刻下的轴向位移量。通过提取标准体的特征轮廓,可确定系统的轴向旋转角度,并进行校正。本发明提供了一种腔体内膛的轮廓扫描装置偶然误差的校正方法,通过扫描标准体,用已知结构的畸变校正扫描轮廓,可对系统运动产生的误差进行校正。
本发明腔体内膛轮廓测量方法适用于测量电磁发射器身管,火炮身管,狭长管道等不同口径大小的腔体内膛轮廓。
作为本发明内膛轮廓测量方法的一种改进,通过升级各部分图像传感器的像素可以获得更高的测量精度,更换不同焦距的镜头可以测量不同口径的腔体;通过更换标准体的几何形状和尺寸可适应不同内腔的特征。
本发明提出的腔体内膛轮廓测量系统的嵌套结构和误差校正方法,解决了狭长腔体内膛轮廓检测时因测量装置运动产生的偶然误差问题,且提供了一种有效的误差校正方法。
附图说明
下面结合附图对本发明作进一步详细的说明。
图1为本发明提供的内膛轮廓测量系统示意图;
图2为本发明误差校正方法的原理图。
具体实施方式
本发明腔体的内膛轮廓测量系统的嵌套结构和误差校正方法,包括如下步骤:
步骤一、将嵌套的测量系统和轴向测距系统放置在腔体一端,将全局激光器放置在另一侧,并且打出全局激光。下达初始化指令、电机初始化以及图像传感器初始化,完成基准校对,并且通过轴向测距装置包括锥形光发生器(1)测量互相嵌套的测量装置和测距装置之间的距离,并通过车载机构及其控制系统(10)移动测距系统,使得该车携带的标准体(7)可被环形激光器(4)发射的环形激光(5)扫描到;
步骤二、通过图像传感器获取采集打在腔体轨道发射器内膛表面上的激光轮廓,其中每一步都可以保证扫过标准体(7);
步骤三、利用全局基准校对系统获得图像传感器输出图像对应的测量时刻的装置姿态信息;
步骤四、利用轴向测距系统获得图像传感器输出图像对应的测量时刻的内膛轴向位移信息,其中轴向是腔体一端开头至另一端开口的方向;
步骤五、整个测量图像传感测量系统装置前进一定距离,重复步骤二到四,依次获得一定范围内不同位置的内膛轮廓数据以及相应的位置信息,总步进距离必须小于标准体(7)的轴向长度(轴向指的是轴向测距系统步进的方向),保证环形激光(5)一直扫过标准体(7);
步骤六、轴向测距系统步进一定距离,重复步骤二到五,获得整个腔体内膛轮廓,总步进距离必须小于标准体的轴向长度,保证环形激光(5)一直扫过标准体(7);
步骤七、将存储的数据导出,并进行拟合还原,最终得到带标准体(7)的腔体内膛三维轮廓。
步骤八、提取扫描得到的标准体(7)的特征,与实际标准体的几何参数进行比较,结合全局校对系统获得的系统偏移信息,通过算法获得测量系统因运动轨道偏离而产生的偶然误差并且将扫描的标准体(7)特征还原。将每一帧的标准体(7)特征还原算法应用到每一帧的内膛三维轮廓的形状和位置变换,可以校正内膛三维轮廓的偶然误差。
本发明提供的腔体内膛测量系统的校正方法和结构,实现的是测量系统主动测量过程中因为运动产生的偏移,旋转和偏转等偶然误差的检测和校正。实现校正的方法是传统相机标定法,即利用已知参数的标准体,通过建立标定物上坐标已知的点与其图像点之间的对应,利用一定的算法获得系统的偶然误差。
最后应当说明的是,以上实施例仅用以说明本发明的技术方案而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行改进或者等同替换,而不脱离本发明技术方案的实质和范围。
- 一种腔体内膛轮廓测量系统的嵌套结构和误差校正方法
- 一种基于线结构光的同步传动表面轮廓测量系统及测量方法