电动机控制装置
文献发布时间:2023-06-19 12:19:35
技术领域
本发明涉及一种电动机控制装置。
背景技术
以往,已知有如下技术:估算由用于降低发动机曲柄轴的振动且包括输入惯性部件及输出惯性部件的减振器产生的减振器扭矩,并将与估算出的减振器扭矩反相的电机扭矩通过电动发电机输出,由此降低因减振器扭矩而产生的振动。在这样的现有技术中,减振器扭矩例如基于输入惯性部件和输出惯性部件之间的扭转角被估算。
专利文献1:日本特开2013-169953号公报
发明内容
然而,作为减振器的结构也可以想到在输入惯性部件和输出惯性部件之间包括中间惯性部件的结构。在估算该结构的减振器扭矩时,必须考虑中间惯性部件和输出惯性部件之间的扭转角。
但是,上述现有技术并没有考虑到中间惯性部件的特性,而仅考虑了输入惯性部件和输出惯性部件之间的扭转角。因此,即使将上述现有技术适用于在输入惯性部件和输出惯性部件之间包括中间惯性部件的结构上,也无法正确估算在输入惯性部件和输出惯性部件之间包括中间惯性部件的结构的减振器扭矩,进而无法有效降低因减振器扭矩而产生的振动。
因此,本发明的目的之一在于提供一种能够降低与减振器扭矩对应地产生的振动的电动机控制装置。
本发明的一示例的电动机控制装置,其为车辆的电动机控制装置,车辆包括:作为动力源的发动机及电动发电机;以及变速器,其以所选择的変速比,将基于发动机的曲柄轴的发动机扭矩、以及电动发电机的电动机轴的电机扭矩中的至少一方的驱动扭矩传递至车轮側,车辆还包括:减振器,其具有连接于曲柄轴的输入惯性部件、至少经由第1弹性部件连接于输入惯性部件的中间惯性部件、至少经由第2弹性部件在输入惯性部件一侧的相反侧连接于中间惯性部件的输出惯性部件,并用于降低曲柄轴的振动,电动机控制装置包括:减振器扭矩计算部,其基于作为曲柄轴的旋转角度的曲柄角和作为电动机轴的旋转角度的电机角度的差值,计算由减振器根据发动机扭矩的波动产生的减振器扭矩;反相扭矩计算部,其基于由减振器扭矩计算部计算出的减振器扭矩,计算与减振器扭矩反相的反相扭矩;校正量计算部,其基于与输入惯性部件和输出惯性部件之间的扭转角对应的第1值、以及与中间惯性部件和输出惯性部件之间的扭转角对应的第2值的差值,计算由反相扭矩计算部计算出的反相扭矩的相位的校正量;以及电机扭矩指令输出部,其基于根据由校正量计算部计算出的校正量而被校正了相位的反相扭矩,输出发给电动发电机的电机扭矩指令。
根据上述电动机控制装置,根据基于第1值和第2值的差值的校正量,能够校正反相扭矩,以消除输入惯性部件和中间惯性部件之间的扭转角的影响,由此能够降低与在输入惯性部件和输出惯性部件之间包括中间惯性部件的减振器的减振器扭矩对应地产生的振动。
在上述电动机控制装置中,电机扭矩指令输出部,在设置于发动机和变速器之间的离合器处于发动机的曲柄轴与变速器的输入轴连接的连接状态时,输出电机扭矩指令;在离合器处于断开曲柄轴与输入轴的连接的断开状态时,输出使电机扭矩为零的电机扭矩指令。根据该结构,根据减振器扭矩是否是经由离合器传递至车轮侧,能够切换是否产生用于降低该减振器扭矩影响的电机扭矩。
在这种情况下,电机扭矩指令输出部,即使在离合器处于连接状态时,在未进行使车辆加速的加速操作的情况下,输出使电机扭矩为零的电机扭矩指令。根据该结构,除离合器的状态外还考虑加速操作的与否,并根据减振器扭矩是否是经由离合器传递至车轮侧,能够切换是否产生用于降低该减振器扭矩影响的电机扭矩。
在上述电动机控制装置中,校正量计算部基于曲柄角及电机角度的、与发动机的点火引爆的一阶频率对应的振动分量的相位差,获得第1值。根据该结构,基于曲柄角和电机角度的相位差,能够容易获得适当的第1值。
在上述电动机控制装置中,校正量计算部基于发动机的转速及变速器的变速级中的至少一方,获得第2值。根据该结构,考虑了被认为是第2值变化的因数的发动机的转速和变速器的变速级中的至少一方,能够获得适当的第2值。
在这种情况下,电动机控制装置还包括:对应图,其表示发动机的转速、变速器的变速级、和第2值的关系,校正量计算部基于发动机的转速及变速器的变速级并参照对应图,获得第2值。根据该结构,利用对应图,能够容易获得更适当的第2值。
本发明的另一示例的电动机控制装置,其是车辆的电动机控制装置,车辆包括:作为动力源的发动机及电动发电机;变速器,其以所选择的変速比,将基于发动机的曲柄轴的发动机扭矩、以及电动发电机的电动机轴的电机扭矩中的至少一方的驱动扭矩传递至车轮側;以及减振器,其具有:连接于曲柄轴的输入惯性部件、经由弹性部件连接于输入惯性部件的输出惯性部件、以及设置于输入惯性部件及输出惯性部件中至少一方的动力吸振器,并用于降低曲柄轴的振动,电动机控制装置包括:减振器扭矩计算部,其基于作为由设置于车辆的第1传感器检测出的曲柄轴的旋转角度的曲柄角和作为由设置于车辆的第2传感器检测出的电动机轴的旋转角度的电机角度的差值,计算由减振器根据发动机扭矩的波动产生的、计算上的减振器扭矩;反相扭矩计算部,其计算与由减振器扭矩计算部计算出的计算上的减振器扭矩反相的反相扭矩;校正量计算部,其至少基于由第1传感器检测出的曲柄角及由第2传感器检测出的电机角度,计算相位校正量及振幅校正量中的至少一方,其中,相位校正量及振幅校正量分别校正因由动力吸振器产生的动力吸振扭矩而产生的、由减振器产生的实际的减振器扭矩和计算上的减振器扭矩之间的相位偏移及振幅偏差;以及电机扭矩指令输出部,其基于根据相位校正量及振幅校正量中至少一方而被校正了的反相扭矩,输出发给电动发电机的电机扭矩指令。
根据上述电动机控制装置,能够基于相位校正量及振幅校正量中的至少一方,校正反相扭矩,以消除因动力吸振扭矩而产生的相位偏移及振幅偏差中的至少一方,并输出与校正后的反相扭矩对应的电机扭矩指令,由此能够降低与包括动力吸振器的减振器的减振器扭矩对应地产生的振动。
另外,在上述电动机控制装置中,电机扭矩指令输出部,在设置于发动机和变速器之间的离合器处于发动机的曲柄轴与变速器的输入轴连接的连接状态时,输出电机扭矩指令;在离合器处于断开曲柄轴与输入轴的连接的断开状态时,输出使电机扭矩为零的电机扭矩指令。根据该结构,根据减振器扭矩是否是经由离合器传递至车轮侧,能够切换是否产生用于降低该减振器扭矩影响的电机扭矩。
在这种情况下,电机扭矩指令输出部,即使在离合器处于连接状态时,在未进行使车辆加速的加速操作的情况下,输出使电机扭矩为零的电机扭矩指令。根据该结构,除离合器的状态外还考虑加速操作的与否,并根据减振器扭矩是否是经由离合器传递至车轮侧,能够切换是否产生用于降低该减振器扭矩影响的电机扭矩。
另外,在上述电动机控制装置中,校正量计算部基于第1值和第2值的差值,计算相位校正量,其中,第1值对应在假设不产生动力吸振扭矩时假定的曲柄角和电机角度的相位差,第2值对应由第1传感器检测出的曲柄角及由第2传感器检测出的电机角度的、与发动机的点火引爆的一阶频率对应的振动分量的相位差。根据该结构,基于第1值和第2值的差值,能够容易获得与因动力吸振扭矩而产生的相位偏移对应的相位校正量。
在这种情况下,校正量计算部基于由设置于车辆的第3传感器检测出的发动机的转速、以及由设置于车辆的第4传感器检测出的变速器的变速级,获得第1值。根据该结构,考虑了被认为是第1值变化的因数的发动机的转速以及变速器的变速级,能够获得适当的第1值。
另外,在这种情况下,电动机控制装置还包括:第1对应图,其表示发动机的转速、变速器的变速级、和第1值的关系,校正量计算部基于由第3传感器检测出的发动机的转速、以及由第4传感器检测出的变速器的变速级并参照第1对应图,获得第1值。根据该结构,利用第1对应图,能够容易获得适当的第1值。
另外,在上述电动机控制装置中,校正量计算部基于由设置于车辆的第3传感器检测出的发动机的转速、以及由设置于车辆的第4传感器检测出的变速器的变速级,获得振幅校正量。根据该结构,考虑了被认为是与因动力吸振扭矩而产生的振幅偏差对应的振幅校正量的变化的因数的发动机的转速以及变速器的变速级,能够获得适当的振幅校正量。
在这种情况下,电动机控制装置还包括:第2对应图,其表示发动机的转速、变速器的变速级、和振幅校正量的关系,校正量计算部基于由第3传感器检测出的发动机的转速、以及由第4传感器检测出的变速器的变速级并参照第2对应图,获得振幅校正量。根据该结构,利用第2对应图,能够容易获得适当的振幅校正量。
另外,在上述电动机控制装置中,校正量计算部获得相位校正量及振幅校正量这两方,电机扭矩指令输出部基于以在相位分量上加上或减去相位校正量,并且在振幅分量上乘上振幅校正量的方式而被校正了的反相扭矩,输出电机扭矩指令。根据该结构,能够基于相位校正量及振幅校正量这两方适当地校正反相扭矩,输出与校正后的反相扭矩对应的适当的电机扭矩指令。
附图说明
图1为示例性且示意性地表示包括第1实施方式涉及的电动机控制装置的车辆的驱动系统的结构的框图。
图2为示例性且示意性地表示第1实施方式涉及的减振器的结构的图。
图3为示例性且示意性地表示通过第1比较例涉及的技术实现的减振器扭矩、电机扭矩、以及传动轴扭矩的波动程度的图。
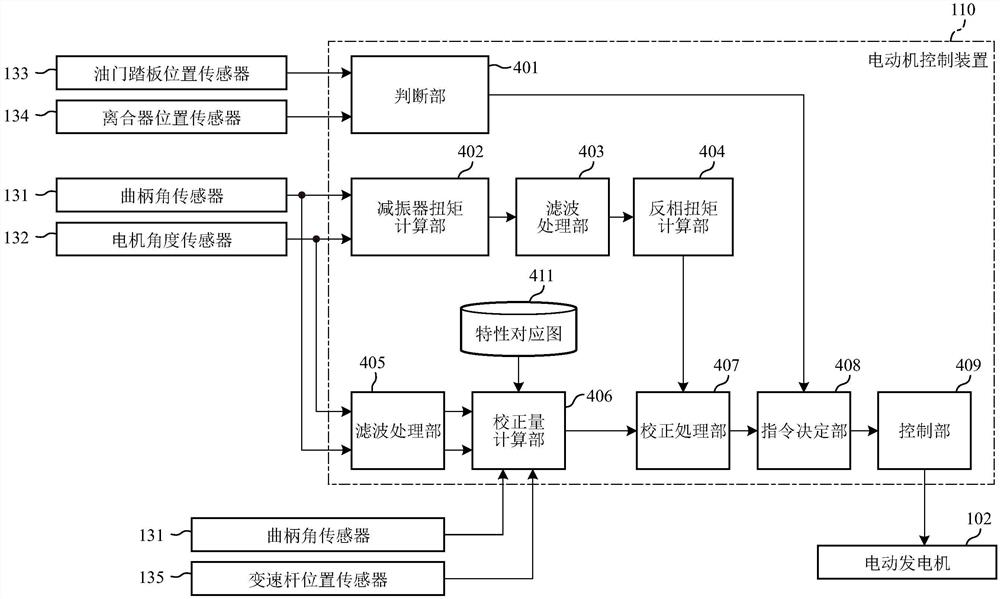
图4为示例性且示意性地表示第1实施方式涉及的电动机控制装置具有的功能模块组的框图。
图5为示例性且示意性地表示在第1实施方式涉及的减振器中可能产生的相位差的一个示例的图。
图6为示例性且示意性地表示第1实施方式涉及的曲柄角和电机角度的相位差的一个示例的图。
图7为示例性且示意性地表示第1实施方式涉及的特性对应图的一个示例的图。
图8为示例性且示意性地表示第1实施方式涉及的电动机控制装置执行的一系列的处理的流程图。
图9为示例性且示意性地表示通过第1实施方式涉及的技术实现的减振器扭矩、电机扭矩、以及传动轴扭矩的波动程度的图。
图10为示例性且示意性地表示第1实施方式涉及的技术和第1比较例涉及的技术的比较效果的图。
图11为示例性且示意性地表示包括第2实施方式涉及的电动机控制装置的车辆的驱动系统的结构的框图。
图12为示例性且示意性地表示第2实施方式涉及的减振器的结构的图。
图13为示例性且示意性地表示第2实施方式涉及的减振器的特性的图。
图14为示例性且示意性地表示第2实施方式涉及的电动机控制装置具有的功能模块组的框图。
图15为示例性且示意性地表示第2实施方式涉及的曲柄角和电机角度的相位差的一个示例的图。
图16为示例性且示意性地表示第2实施方式涉及的相位校正用对应图的一个示例的图。
图17为示例性且示意性地表示第2实施方式涉及的振幅校正用对应图的一个示例的图。
图18为示例性且示意性地表示第2实施方式涉及的电动机控制装置执行的一系列的处理的流程图。
图19为示例性且示意性地表示第2实施方式的效果的模拟结果的图。
具体实施方式
下面,参照附图,说明本发明的实施方式。以下记述的实施方式的结构以及该结构所带来的作用和结果(效果)只不过是一个示例,并不限于以下的记述内容。
第1实施方式
图1为示例性且示意性地表示包括第1实施方式涉及的电动机控制装置110的车辆V的驱动系统100的结构的框图。
如图1所示,第1实施方式涉及的车辆V的驱动系统100包括发动机101、电动发电机102、变速器103、减振器104、离合器105、以及电动机控制装置110。
发动机101及电动发电机102为车辆V的动力源。发动机101根据发动机ECU(未图示)的控制输出发动机扭矩,来使曲柄轴121旋转。同样地,电动发电机102根据电动机控制装置110的控制输出电机扭矩,来使电动机轴122旋转。
变速器103将基于发动机101的曲柄轴121的发动机扭矩及电动发电机102的电动机轴122的电机扭矩中的至少一方的驱动扭矩以所选择的变速比传递给车轮W侧。驱动扭矩作为传动轴扭矩经由传动轴123传递给车轮W侧。
减振器104为降低(吸收)曲柄轴121的振动、即发动机扭矩的波动的扭矩波动吸收装置。减振器104基于之后的图2所示的结构,根据发动机扭矩的波动,产生包含扭转扭矩及滞后扭矩的减振器扭矩。
图2为示例性且示意性地表示第1实施方式涉及的减振器104的结构的图。如图2所示,第1实施方式涉及的减振器104包括输入惯性部件201、中间惯性部件202、以及输出惯性部件203。输入惯性部件201、中间惯性部件202、以及输出惯性部件203具有相对于同一旋转中心相互能够相对旋转的结构。
输入惯性部件201与发动机101的曲柄轴121连接。即,输入惯性部件201设置于减振器104中发动机扭矩的波动被输入的输入侧。
中间惯性部件202经由弹性部件211及摩擦部件213与输入惯性部件201连接。由此,在输入惯性部件201和中间惯性部件202之间形成因弹性部件211而引起的扭转扭矩的传递路径、及因摩擦部件213而引起的滞后扭矩的传递路径。此外,弹性部件211为“第1弹性部件”的一个示例。
输出惯性部件203设置于减振器104中减振器扭矩被输出的输出侧。更具体地,输出惯性部件203在输入惯性部件201一侧的相反侧经由弹性部件212与中间惯性部件202连接。由此,在中间惯性部件202和输出惯性部件203之间形成因弹性部件212而引起的扭转扭矩的传递路径。此外,弹性部件211为“第2弹性部件”的一个示例。
返回图1,离合器105设置于发动机101和变速器103之间,对发动机101的曲柄轴121和变速器103的输入轴124的连接或断开进行切换。更具体地,离合器105在其处于将曲柄轴121和输入轴124连接的连接状态时,执行曲柄轴121和输入轴124之间的扭矩(的至少一部分)的传递,在其处于断开曲柄轴121和输入轴124连接的连接状态时,断开曲柄轴121和输入轴124之间的扭矩的传递。
电动机控制装置110例如为作为具备如处理器或存储器等那样的与普通计算机相同的硬件的微处理器而构成的ECU(Electronic Control Unit,电子控制单元)。电动机控制装置110通过将作为指令值的电机扭矩指令发给电动发电机102,来控制电动发电机102的电机扭矩。
电动机控制装置110能够将设置于车辆V各种传感器利用于控制中。在图1所示的示例中,作为各种传感器举例有:曲柄角传感器131、电机角度传感器132、油门踏板位置传感器133、离合器位置传感器134、以及变速杆位置传感器135。
曲柄角传感器131检测作为曲柄轴121的旋转角度的曲柄角。电机角度传感器132检测作为电动机轴122旋转角度的电机角度。
油门踏板位置传感器133通过检测例如油门踏板等,进行使车辆V加速的加速操作的加速操作部(未图示)的操作量(操作位置)等,来检测驾驶员是否进行加速操作。离合器位置传感器134通过检测例如离合器踏板等,操作离合器105的离合器操作部(未图示)的操作量(操作位置)等,来检测离合器105处于连接状态或者断开状态。
变速杆位置传感器135检测变速器103中当前被设定的变速级(档位)。
然而,以往,已知有如下技术:估算不包括与第1实施方式涉及的中间惯性部件202对应的结构的减振器、即、(仅)包括与输入惯性部件201对应的结构及与输出惯性部件203对应的结构的减振器产生的减振器扭矩,并输出与估算出的减振器扭矩反相的电机扭矩,以降低因减振器扭矩而产生的振动。在这种现有技术中,基于曲柄角和电机角度的差值、即输入惯性部件201和输出惯性部件203之间的扭转角估算减振器扭矩。
但是,如第1实施方式涉及的减振器104那样的、在输入惯性部件201和输出惯性部件203之间包括中间惯性部件202的结构中,如果不考虑中间惯性部件202的特性,则无法准确地估算需利用电机扭矩抵消的减振器扭矩。
更具体地,在输入惯性部件201和输出惯性部件203之间包括中间惯性部件202的结构中,考虑中间惯性部件202和输出惯性部件203之间的扭转角,对准确估算减振器扭矩尤为重要。但是,在上述现有技术中,未考虑中间惯性部件202的特性,而仅考虑了输入惯性部件201和输出惯性部件203之间的扭转角,因此无法准确地估算在输入惯性部件201和输出惯性部件203之间包括中间惯性部件202的结构的减振器扭矩。
因此,如之后的图3所示的示例那样,对与在输入惯性部件201和输出惯性部件203之间包括中间惯性部件202的第1实施方式涉及的减振器104,即使适用了基于与上述现有技术相同的技术构思的第1比较例涉及的技术,也无法适当地降低因减振器扭矩而产生的振动、即传动轴扭矩的波动。
图3为示例性且示意性地表示将第1比较例涉及的技术适用于第1实施方式涉及的减振器104时所实现的减振器扭矩、电机扭矩、以及传动轴扭矩的波动的图。在第1比较例涉及的技术中,与上述现有技术相同地,基于曲柄角和电机角度的差值估算减振器扭矩,并输出与估算出的减振器扭矩反相的电机扭矩。
在图3的(a)所示的示例中,实线L311对应第1实施方式涉及的减振器104的(实际)减振器扭矩历时变化的一个示例;在图3的(b)所示的示例中,实线L321对应基于通过第1比较例涉及的技术估算出的、估算而得的减振器扭矩而输出的电机扭矩历时变化的一个示例。
对比实线L311和实线L321可知,在第1比较例涉及的技术中,减振器扭矩和电机扭矩并不成完全反相,而会产生相位的偏移。因此,在第1比较例涉及的技术中,如之后图3的(c)所示的示例那样,无法适当地降低传动轴扭矩的波动。
在图3的(c)所示的示例中,实线L331对应的是:在执行了用图3的(b)所示的电机扭矩试图抵消图3的(a)所示的减振器扭矩的防振控制时,相对于发动机101的转速的传动轴扭矩的波动的一个示例;点画线L332对应在不执行防振控制时,相对于发动机101的转速的传动轴扭矩的波动的一个示例。
对比实线L331和点画线L332可知,在第1比较例涉及的技术中,与不执行防振控制时相比,在执行防振控制时反而使传动轴扭矩的波动程度恶化。这是因为,在第1比较例涉及的技术中,如上所述,未考虑中间惯性部件202的特性而估算不准确的减振器扭矩,并基于该不准确的减振器扭矩决定电机扭矩而引起的。
如上所述,在输入惯性部件201和输出惯性部件203之间包括中间惯性部件202的第1实施方式涉及的减振器104中,需要用与第1比较例涉及的技术的不同的技术,来降低传动轴扭矩的波动,即与减振器扭矩对应地产生的振动。
这里,第1实施方式通过在电动机控制装置110内实现如之后的图4所示的功能模块组,来实现降低与在输入惯性部件201和输出惯性部件203之间包括中间惯性部件202的减振器104的减振器扭矩对应地产生的振动。
图4为示例性且示意性地表示第1实施方式涉及的电动机控制装置110具有的功能模块组的框图。作为读取存储于电动机控制装置110的处理器或存储器等的控制程序的结果,例如能够通过硬件和软件的协同来实现图4所示的功能模块组。但是,在第1实施方式中,图4所示的功能模块组一部分或全部也可以通过专用硬件(电路)实现。
如图4所示,电动机控制装置110作为功能模块分别包括判断部401、减振器扭矩计算部402、滤波处理部403、反相扭矩计算部404、滤波处理部405、校正量计算部406、校正処理部407、指令决定部408、以及控制部409。另外,电动机控制装置110作为控制用数据具备特性对应图411。
判断部401基于油门踏板位置传感器133及离合器位置传感器134的检测结果,判断是否需要输出通过抵消减振器扭矩来降低传动轴123的振动的电机扭矩。此外,之后有时会将用于降低传动轴123的振动的电机扭矩称为防振扭矩。
例如,在离合器105处于断开状态时,或者虽然离合器105处于连接状态但未进行加速操作时等,发动机扭矩的波动并不传递至传动轴123,因此无需输出防振扭矩。因此,在这种情况下,判断部401将无需输出防振扭矩的主旨通知给指令决定部408,以使防振扭矩为零。
另一方面,在离合器105处于连接状态且进行加速操作时,发动机扭矩的波动传递至传动轴123,因此需要通过防振扭矩降低振动。因此,在这种情况下,判断部401将需要输出防振扭矩的主旨通知给指令决定部408,以输出用于抵消减振器扭矩的防振扭矩。
减振器扭矩计算部402基于曲柄角传感器131及电机角度传感器132的检测结果,通过之后说明的运算,计算(估算)与上述第1比较例涉及的技术相同的、考虑了输入惯性部件201和输出惯性部件203之间的扭转角的、估算而得的减振器扭矩。
即,在将作为曲柄角传感器131的检测结果的曲柄角设为θ1,将作为电机角度传感器132的检测结果的电机角度设为θ2时,减振器扭矩计算部402基于表示θ1和θ2的差值的公式(θ1-θ2),计算输入惯性部件201和输出惯性部件203之间的扭转角。此外,在将减振器104的旋转弹簧常数设为K时,减振器扭矩计算部402基于用公式(θ1-θ2)表示的减振器104的扭转角和K之间的相乘,计算估算而得的减振器扭矩。
此外,如上所述,第1实施方式涉及的减振器104包括两个弹性部件211、212。并且,这两个弹性部件211、212可以认为是相互串联连接(参见图2)。因此,在用于计算估算而得的减振器扭矩的上述运算中,在将弹性部件211、212的旋转弹簧常数分别设为K1、K2时,减振器扭矩计算部402计算用公式(K1×K2)/(K1+K2)表示的合成弹簧常数,作为表示减振器104的旋转弹簧常数的K。
滤波处理部403对减振器扭矩计算部402计算结果进行滤波处理,来抽取与发动机101的点火引爆的一阶频率对应的振动分量。滤波处理部403例如通过带通滤波器实现上述的抽取处理,该带通滤波器将与发动机101的点火引爆的一阶频率对应的频率范围作为通过带宽。
反相扭矩计算部404通过对滤波处理部403的抽取结果执行相位的反转处理等,计算作为计算防振扭矩的基础的、与估算而得的减振器扭矩反相的反相扭矩。
可是,如前述那样,第1实施方式涉及的减振器104中需抵消的减振器扭矩为基于中间惯性部件202和输出惯性部件203之间的扭转角的值。
相对于此,作为计算反相扭矩的基础而被输入至反相扭矩计算部404的、估算而得的减振器扭矩为,基于输入惯性部件201和输出惯性部件203之间的扭转角的值,即包含了输入惯性部件201和中间惯性部件202之间的扭转角、以及中间惯性部件202和输出惯性部件203之间的扭转角这两方的值。
因此,为了有效降低与减振器扭矩对应地产生的振动,需要对由反相扭矩计算部404计算出的反相扭矩进行偏移与输入惯性部件201和中间惯性部件202之间的扭转角对应的量的校正。
这里,输入惯性部件201和输出惯性部件203之间的扭转角、输入惯性部件201和中间惯性部件202之间的扭转角、和中间惯性部件202和输出惯性部件203之间的扭转角之间存在如之后图5那样的关系。
图5为示例性且示意性地表示在第1实施方式涉及的减振器104中可能产生的相位差的一个示例的图。在图5所示的示例中,实线L501对应输入惯性部件201和输出惯性部件203之间的扭转角(表示相位差)、以及发动机101的转速的关系的一个示例;实线L502对应输入惯性部件201和中间惯性部件202之间的扭转角(表示相位差)、以及发动机101的转速的关系的一个示例。
如图5所示,输入惯性部件201和输出惯性部件203之间的扭转角(表示相位差)Δt1、以及输入惯性部件201和中间惯性部件202之间的扭转角(表示相位差)Δt0之间存在相位差Δt2。该相位差Δt2对应中间惯性部件202和输出惯性部件203之间的扭转角(表示相位差)。
如上所述,输入惯性部件201和输出惯性部件203之间的扭转角(表示相位差)Δt1、中间惯性部件202和输出惯性部件203之间的扭转角(表示相位差)Δt2、以及输入惯性部件201和中间惯性部件202之间的扭转角(表示相位差)Δ0之间可以认为存在Δt0=Δt1-Δt2的关系。
因此,第1实施方式通过以下说明的结构,基于输入惯性部件201和输出惯性部件203之间的扭转角、以及中间惯性部件202和输出惯性部件203之间的扭转角的差值,计算输入惯性部件201和中间惯性部件202之间的扭转角,并基于计算结果来校正由反相扭矩计算部404计算出的反相扭矩。
返回图4,滤波处理部405对曲柄角传感器131及电机角度传感器132的检测结果进行滤波处理,来抽取与发动机101的点火引爆的一阶频率对应的振动分量。与滤波处理部403同样地,滤波处理部405例如通过带通滤波器实现上述的抽取处理,该带通滤波器将与发动机101的点火引爆的一阶频率对应的频率范围作为通过带宽。
校正量计算部406基于滤波处理部405抽取结果、以及油门踏板位置传感器133和变速杆位置传感器135的检测结果,计算反相扭矩的相位的校正量。
更具体地,校正量计算部406基于与曲柄角和电机角度的振动分量的相位差对应的第1值、以及与中间惯性部件202和输出惯性部件203之间的扭转角(表示估算而得的相位差)对应的第2值,计算校正量,上述振动分量与发动机101的点火引爆的一阶频率对应。此外,在以下,有时会将第1值表示为实际相位差,将第2值表示为特性相位差。
实际相位差能够基于滤波处理部405的抽取结果计算。即,如上所述,滤波处理部405抽取作为曲柄角传感器131的检测结果的曲柄角、以及作为电机角度传感器132的检测结果的电机角度的各自振动分量,上述振动分量与发动机101的点火引爆的一阶频率对应,因此只要对比这些抽取结果就能够以例如之后的图6所示的形式计算实际相位差。
图6为示例性且示意性地表示第1实施方式涉及的曲柄角和电机角度的相位差的一个示例的图。在图6所示的示例中,实线L601表示曲柄角的、与发动机101的点火引爆的一阶频率对应的振动分量的历时变化,实线L602表示电机角度的、与发动机101的点火引爆的一阶频率对应的振动分量的历时变化。
如图6所示的那样,曲柄角超过规定阈值Th的时刻T1和电机角度超过规定阈值Th的时刻T2之间存在规定时差Δta(=T1-T2)。校正量计算部406基于滤波处理部405的抽取结果获得时差Δta,并基于该时差Δta计算实际相位差。
此外,在图6所示的示例中,实际相位差也可以基于曲柄角低于规定阈值Th的时刻和电机角度低于规定阈值Th的时刻的差值计算。
另一方面,特性相位差能够基于曲柄角传感器131及变速杆位置传感器135的检测结果和之后的图7所示的特性对应图411计算。
图7为示例性且示意性地表示第1实施方式涉及的特性对应图411的一个示例的图。如图7所示,特性对应图411为表示发动机101的转速、变速器103的变速级、和特性相位差的关系的预设数据。
在特性对应图411中,发动机101的转速和特性相位差的关系被定义为与变速级的档位对应的多个线(实线L701、虚线L702、点画线L703、以及双点画线L704)。实线L701对应在低速~中速(例如,第1速~第3速)的变速级中发动机101的转速和特性相位差的关系;虚线L702对应在比实线L701的变速级高速(例如,第4速)的变速级中发动机101的转速和特性相位差的关系。另外,点画线L703对应在比虚线L702的变速级更高速(例如,第5速)的变速级中发动机101的转速和特性相位差的关系;双点画线L704对应在最高速(例如,第6速)的变速级中发动机101的转速和特性相位差的关系。
根据特性对应图411,从上述多个线中选择与基于变速杆位置传感器135的检测结果获得的变速级对应的一条线,并抽取与基于曲柄角传感器131的检测结果获得的发动机101的转速对应的点,由此能够容易获得特性相位差。
如上所述,在第1实施方式中,校正量计算部406基于发动机101的转速及变速器103的变速级并参照特性对应图411,来获得特性相位差。
此外,在第1实施方式中,校正量计算部406基于实际相位差和特性相位差的差值,计算需对反相扭矩进行校正的校正量。如上所述,实际相位差对应于输入惯性部件201和输出惯性部件203之间的扭转角,特性相位差对应于中间惯性部件202和输出惯性部件203之间的扭转角。因此,在将实际相位差设为Δta,将特性相位差设为Δtb时,通过表示两者差值的公式(Δta-Δtb)计算出的校正量对应于输入惯性部件201和中间惯性部件202之间的扭转角。
返回图2,校正処理部407基于由校正量计算部406计算出的校正量,对由反相扭矩计算部404计算出的反相扭矩进行校正。更具体地,使反相扭矩的相位偏移(延迟)校正量的分量。由此,能够消除输入惯性部件201和中间惯性部件202之间的扭转角的影响,并且能够计算第1实施方式涉及的减振器104中原本需要估算的、可抵消仅考虑了中间惯性部件202和输出惯性部件203之间的扭转角的减振器扭矩的防振扭矩。
此外,如上所述的相位的延迟处理在将反相扭矩设为Tq,将校正量设为Δt,将控制周期设为Ts时,能够通过利用了延迟算子z
在由判断部401判断为需要输出防振扭矩时,指令决定部408基于由校正処理部407计算出的防振扭矩,决定发给电动发电机102的电机扭矩指令。
并且,控制部409基于由指令决定部408决定的电机扭矩指令驱动电动发电机102。
如上所述,指令决定部408及控制部409作为电机扭矩指令输出部发挥功能,该电机扭矩指令输出部基于根据校正用相位差而被校正了相位的反相扭矩,输出发给电动发电机102的电机扭矩指令。
基于以上结构,第1实施方式涉及的电动机控制装置110按照之后的图8所示的处理流程执行一系列的处理。
图8为示例性且示意性地表示第1实施方式涉及的电动机控制装置110执行的一系列的处理的流程图。
如图8所示,在第1实施方式中,首先,在S801中,电动机控制装置110的判断部401判断是否需要通过防振扭矩进行防振。如上所述,该判断基于油门踏板位置传感器133的检测结果、及离合器位置传感器134的检测结果进行。
在S801中,判断为需要进行防振时,处理会移动至S802。另外,在S802中,电动机控制装置110的减振器扭矩计算部402通过基于曲柄角传感器131的检测结果、电机角度传感器132的检测结果、以及减振器104的旋转弹簧常数(基于弹性部件211、212的旋转弹簧常数的串联的合成弹簧常数)的上述运算,计算估算而得的减振器扭矩。
另外,在S803中,电动机控制装置110的滤波处理部403对在S802中计算出的减振器扭矩执行滤波处理。如上所述,该在S803中执行的滤波处理为从减振器扭矩中抽取与发动机101的点火引爆的一阶频率对应的振动分量的处理。
另外,在S804中,电动机控制装置110的反相扭矩计算部404通过对S803的处理结果执行相位的反转处理等,计算与减振器扭矩反相的反相扭矩。
另外,在S805中,电动机控制装置110的滤波处理部405对作为曲柄角传感器131及电机角度传感器132的各自检测结果的曲柄角及电机角度执行滤波处理。如上所述,该在S805中执行的滤波处理为从曲柄角及电机角度中抽取与发动机101的点火引爆的一阶频率对应的振动分量的处理。
另外,在S806中,电动机控制装置110的校正量计算部406基于在S805中抽取的两个振动分量的差值,计算与输入惯性部件201和输出惯性部件203之间的扭转角对应的实际相位差。
另外,在S807中,电动机控制装置110的校正量计算部406基于从曲柄角传感器131的检测结果获得的发动机101的转速、以及从变速杆位置传感器135的检测结果获得的变速器103的变速级并参照特性对应图411,计算与中间惯性部件202和输出惯性部件203之间的扭转角对应的特性相位差。
另外,在S808中,电动机控制装置110的校正量计算部406基于在S806中计算出的实际相位差和在S807中计算出的特性相位差的差值,计算在S804中计算出的反相扭矩的相位的校正量。如上所述,该校正量对应于输入惯性部件201和中间惯性部件202之间的扭转角。
另外,在S809中,电动机控制装置110的校正処理部407根据在S808中计算出的校正量,对在S804中计算出的反相扭矩进行校正。由此,能够消除输入惯性部件201和中间惯性部件202之间的扭转角的影响,并且能够计算第1实施方式涉及的减振器104中原本需要估算的、可抵消仅考虑了中间惯性部件202和输出惯性部件203之间的扭转角的减振器扭矩的防振扭矩。
另外,在S810中,电动机控制装置110的指令决定部408决定用于产生与在S807中被校正的反相扭矩对应的电机扭矩的电机扭矩指令。
另外,在S811中,电动机控制装置110的控制部409向电动发电机102输出在S810中决定的电机扭矩指令。由此,处理结束。
此外,在第1实施方式中,在S801中判断为需要进行防振时,处理移动至S812。另外,在S812中,电动机控制装置110的指令决定部408决定用于使电机扭矩为零的电机扭矩指令。
S812的处理后,与S810的处理后相同地,处理移动至S811。另外,在S811中,电动机控制装置110的控制部409向电动发电机102输出在S810中所决定的、用于使电机扭矩为零的电机扭矩指令。由此,处理结束。
如上所示,第1实施方式涉及的电动机控制装置110适用于包括减振器104的车辆V,该减振器104具有与曲柄轴121连接的输入惯性部件201、至少经由弹性部件211于该输入惯性部件201连接的中间惯性部件202、以及在输入惯性部件201一侧的相反侧至少经由弹性部件212与该中间惯性部件202连接的输出惯性部件203。
另外,第1实施方式涉及的电动机控制装置110包括减振器扭矩计算部402、反相扭矩计算部404、校正量计算部406、以及作为电机扭矩指令输出部的指令决定部408和控制部409。减振器扭矩计算部402基于曲柄角和电机角度的差值,计算减振器根据发动机扭矩的波动而产生的减振器扭矩。反相扭矩计算部404基于由减振器扭矩计算部402计算出的减振器扭矩,计算与该减振器扭矩反相的反相扭矩。校正量计算部406基于与输入惯性部件201和输出惯性部件203之间的扭转角对应的第1值(实际相位差)、以及与中间惯性部件202和输出惯性部件203之间的扭转角对应的第2值(特性相位差)的差值,计算由反相扭矩计算部404计算出的反相扭矩的相位的校正量。指令决定部308及控制部309基于根据由校正量计算部406计算出的校正量而被校正了相位的反相扭矩,输出发给电动发电机102的电机扭矩指令。
根据上述结构,通过基于实际相位差和特性相位差的差值的校正量,能够对反相扭矩进行校正,以消除输入惯性部件201和中间惯性部件202之间的扭转角的影响,由此能够降低根据在输入惯性部件201和输出惯性部件203之间包括中间惯性部件202的减振器104的减振器扭矩而产生的振动。
这里,在第1实施方式中,指令决定部308及控制部309在设置于发动机101和变速器103之间的离合器105处于将曲柄轴121与输入轴124连接的连接状态时,输出电机扭矩指令;在离合器105处于断开曲柄轴121与输入轴124的连接的断开状态时,输出使电机扭矩为零的电机扭矩指令。根据上述结构,根据减振器扭矩是否是经由离合器传递至车轮W侧,能够切换是否产生用于降低该减振器扭矩的影响的电机扭矩。
进一步地,在第1实施方式中,指令决定部308及控制部309即使在离合器105处于连接状态时,在未进行使车辆V加速的加速操作的情况下,输出使电机扭矩为零的电机扭矩指令。根据上述结构,除离合器105的状态外进一步考虑加速操作的与否,根据减振器扭矩是否是经由离合器传递至车轮W侧,能够切换是否产生用于降低该减振器扭矩的影响的电机扭矩。
此外,在第1实施方式中,校正量计算部406基于曲柄角及电机角度的与发动机101的点火引爆的一阶频率对应的振动分量的相位差,获得实际相位差。根据上述结构,基于曲柄角及电机角度的相位差,能够容易获得适当的实际相位差。
此外,在第1实施方式中,校正量计算部406基于发动机101的转速、及变速器103的变速级,获得特性相位差。据上述结构,考虑被视为特性相位差变化的因素的发动机101的转速及变速器103的变速级这两方,能够获得适当的特性相位差。
更具体地,在第1实施方式中,电动机控制装置110具备作为表示发动机101的转速、变速器103的变速级、和特性相位差的关系的对应图的特性对应图411。另外,校正量计算部406基于发动机101的转速及变速器103的变速级并参照特性对应图411,获得特性相位差。根据上述结构,利用特性对应图411,能够容易获得适当的特性相位差。
另外,在第1实施方式中,校正量计算部406考虑发动机101的转速及变速器103的变速级这两方,获得特性相位差。但是,在第1实施方式中,有时可能仅基于发动机101的转速及变速器103的变速级中的一方,获得特性相位差。
另外,在第1实施方式中,在驱动系统的状态处于扭矩被传递至传动轴123的传递状态时,发动机101的转速及变速器103的变速级能够从电动发电机102转速等求出。进一步地,在第1实施方式中,变速器103的变速级能够从变速器103的输入轴124与输出轴(未图示)的转速之比等求出。
接着,关于第1实施方式涉及的技术的效果,简单说明模拟的结果。
图9为示例性且示意性地表示通过第1实施方式涉及的技术实现的减振器扭矩、电机扭矩、以及传动轴扭矩的波动程度的图。该图9能够与上述的图3进行对比。
在图9的(a)所示的示例中,实线L911对应第1实施方式涉及的减振器104的(实际)减振器扭矩的历时变化的一个示例;在图9的(b)所示的示例中,实线L921对应在第1实施方式涉及的技术中作为防振扭矩而输出的电机扭矩的历时变化的一个示例。
对比实线L911和实线L921可知,在第1实施方式涉及的技术中,减振器扭矩和电机扭矩大致完全反相。因此,根据第1实施方式涉及的技术,如之后的图9的(c)所示的示例那样,能够适当地降低传动轴扭矩的波动。
在图9的(c)所示的示例中,实线L931对应的是:在执行了用图9的(b)所示的电机扭矩试图抵消图9的(a)所示的减振器扭矩的防振控制时,相对于发动机101的转速的传动轴扭矩的波动的一个示例;点画线L932对应在不执行防振控制时,相对于发动机101的转速的传动轴扭矩的波动的一个示例。
对比实线L331和点画线L332可知,在第1实施方式涉及的技术中,与不执行防振控制时相比,执行防振控制时的传动轴扭矩的波动程度明显优异。这是因为,在第1实施方式涉及的技术中,如上所示那样,对基于与输入惯性部件201和输出惯性部件203之间的扭转角对应的、估算而得的减振器扭矩的反相扭矩进行适当地校正,之后决定电机扭矩而引起的。
另外,图10为示例性且示意性地表示第1实施方式涉及的技术和第1比较例涉及的技术的比较效果的图。
在图10所示的示例中,实线L1001对应通过第1实施方式涉及的技术而获得的传动轴扭矩的历时变化的一个示例;虚线L1002对应通过第1比较例涉及的技术而获得的传动轴扭矩的历时变化的一个示例。
对比实线L1001和虚线L1002可知,通过第1实施方式涉及的技术而获得的传动轴扭矩的波动幅度明显小于通过第1比较例涉及的技术而获得的传动轴扭矩的波动幅度。因此,根据第1实施方式涉及的技术,相比于第1比较例涉及的技术,能够更好地降低传动轴扭矩的波动。
第2实施方式
然而,作为减振器的结构可以想到除输入惯性部件和输出惯性部件之外还包括动力吸振器的结构。为了估算该结构的减振器扭矩,除扭转扭矩外,还需考虑动力吸振器的特性,即动力吸振器产生的动力吸振扭矩。
但是,上述现有技术并未考虑动力吸振扭矩,仅考虑了扭转扭矩。因此,即使对包括动力吸振器的减振器直接适用上述现有技术,也无法准确地估算减振器扭矩,进而无法有效降低与减振器扭矩对应地产生的振动。
因此,第2实施方式通过以下说明的结构及处理,来降低与包括动力吸振器的减振器的减振器扭矩对应地产生的振动。
图11为示例性且示意性地表示包括第2实施方式涉及的电动机控制装置1110的车辆V的驱动系统1100的结构的框图。
如图11所示,第2实施方式涉及的车辆V的驱动系统1100包括发动机1101、电动发电机1102、变速器1103、减振器1104、离合器105、以及电动机控制装置1110。
发动机1101及电动发电机1102为车辆V的动力源。发动机1101根据发动机ECU(未图示)的控制输出发动机扭矩,来使曲柄轴1121旋转。同样地,电动发电机1102根据电动机控制装置1110的控制输出电机扭矩,来使电动机轴1122旋转。
变速器1103将基于发动机1101的曲柄轴1121的发动机扭矩及电动发电机1102的电动机轴1122的电机扭矩中的至少一方的驱动扭矩以所选择的变速比传递给车轮W侧。驱动扭矩作为传动轴扭矩经由传动轴1123传递给车轮W侧。
减振器1104为降低(吸收)曲柄轴1121的振动、即发动机扭矩的波动的扭矩波动吸收装置。减振器1104基于之后的图12所示的结构,根据发动机扭矩的波动,产生基于扭转扭矩及动力吸振扭矩的减振器扭矩。
图12为示例性且示意性地表示第2实施方式涉及的减振器1104的结构的图。如图12所示,第2实施方式涉及的减振器1104包括输入惯性部件1201、输出惯性部件1202、动力吸振器1211、以及弹性部件1221。输入惯性部件1201及输出惯性部件1202例如具有相对于同一旋转中心相互能够相对旋转的结构。
输入惯性部件1201与发动机1101的曲柄轴1121连接。即,输入惯性部件1201设置于减振器1104中发动机扭矩的波动被输入的输入侧。
输出惯性部件1202经由弹性部件1221与输入惯性部件1201连接。由此,因弹性部件1221的扭转变形而产生的扭转扭矩(参见箭头A1201)在输入惯性部件1201和输出惯性部件1202被传递。
动力吸振器1211设置于输出惯性部件1202。动力吸振器1211例如包括可振动的质量体,且通过因该质量体的振动而产生的动力吸振扭矩(参见箭头A1202),来降低输出惯性部件1202的振动。
根据上述结构,如之后的图13所示那样,第2实施方式涉及的减振器1104产生由弹性部件1221产生的扭转扭矩和由动力吸振器1211产生的动力吸振扭矩的合成扭矩,作为(总的)减振器扭矩。
图13为示例性且示意性地表示第2实施方式涉及的减振器1104的特性的图。在图13所示的示例中,实线L1300对应由减振器1104产生的(总的)减振器扭矩的历时变化;点画线L1301对应减振器扭矩中由弹性部件1221产生的扭转扭矩的历时变化;双点画线L1302对应减振器扭矩中由动力吸振器1211产生的动力吸振扭矩。
从图13所示的点画线L1301及双点画线L1302(以及图12所示的箭头A1201及A1202)的关系可知,表示如动力吸振扭矩抵消扭转扭矩那样的状态。但是,动力吸振扭矩的振幅小于扭转扭矩的振幅,且动力吸振扭矩的相位与扭转扭矩相位不是完全反相的关系。
因此,在第2实施方式中,作为扭转扭矩和动力吸振扭矩的合成扭矩的减振器扭矩表示,相对于扭转扭矩具有如以尺寸D1301表示的相位偏移和以尺寸D1302表示的振幅偏差那样的历时变化(参见实线L1300及点画线L1301)。
返回图11,离合器1105设置于发动机1101和变速器1103之间,对发动机1101的曲柄轴1121和变速器1103的输入轴1124的连接或断开进行切换。
更具体地,离合器1105在其处于将曲柄轴1121和输入轴1124连接的连接状态时,执行曲柄轴1121和输入轴1124之间的扭矩(的至少一部分)的传递,在其处于断开曲柄轴1121和输入轴1124连接的连接状态时,断开曲柄轴1121和输入轴1124之间的扭矩的传递。
电动机控制装置1110例如为作为具备如处理器或存储器等那样的与普通计算机相同的硬件的微处理器而构成的ECU(Electronic Control Unit,电子控制单元)。电动机控制装置1110通过将作为指令值的电机扭矩指令发给电动发电机1102,来控制电动发电机1102的电机扭矩。
电动机控制装置1110能够将设置于车辆V各种传感器利用于控制中。在图11所示的示例中,作为各种传感器举例有:曲柄角传感器1131、电机角度传感器1132、油门踏板位置传感器1133、离合器位置传感器1134、以及变速杆位置传感器1135。
曲柄角传感器1131检测作为曲柄轴1121的旋转角度的曲柄角。利用曲柄角传感器1131的检测结果,则能够检测出发动机1101的转速。曲柄角传感器1131为“第1传感器”的一个示例,也为“第3传感器”的一个示例。
电机角度传感器1132检测作为电动机轴1122旋转角度的电机角度。电机角度传感器1132为“第2传感器”的一个示例。
油门踏板位置传感器1133通过检测例如油门踏板等,进行使车辆V加速的加速操作的加速操作部(未图示)的操作量(操作位置)等,来检测驾驶员是否进行加速操作。
离合器位置传感器1134通过检测例如离合器踏板等,操作离合器1105的离合器操作部(未图示)的操作量(操作位置)等,来检测离合器1105处于连接状态或者断开状态。
变速杆位置传感器1135检测变速器1103中当前被设定的变速级(档位)。变速杆位置传感器1135为“第4传感器”的一个示例。
然而,如上所述,以往,已知有如下技术:估算不包括与第2实施方式涉及的动力吸振器1211对应的结构的减振器、即、(仅)包括与输入惯性部件1201对应的结构及与输出惯性部件1202对应的结构的减振器产生的减振器扭矩,并输出与估算出的减振器扭矩反相的电机扭矩,以降低因减振器扭矩而产生的振动。在这种现有技术中,作为与输入惯性部件1201和输出惯性部件1202之间的扭转角对应的扭转扭矩,基于曲柄角和电机角度的差值估算减振器扭矩。
但是,在如第2实施方式涉及的减振器1104那样的、包括动力吸振器1211的结构中,如果除扭转扭矩外不考虑动力吸振器1211的特性、即、由动力吸振器1211产生的动力吸振扭矩,则无法适当地降低与减振器扭矩对应地产生的振动。
更具体地,如上所述,包括动力吸振器1211的减振器1104产生相对于扭转扭矩具有相位偏移及振幅偏差的减振器扭矩,作为扭转扭矩和动力吸振扭矩的合成扭矩。但是,上述现有技术仅考虑了扭转扭矩。因此,在将现有技术直接适用于包括动力吸振器1211的减振器1104时,无法准确估算需要通过电机扭矩抵消的减振器扭矩,其结果,无法适当地降低与减振器扭矩对应地产生的振动。
这里,第2实施方式通过在电动机控制装置1110内实现如之后的图14所示的功能模块组,来实现降低与包括动力吸振器1211的减振器1104的减振器扭矩对应地产生的振动。
图14为示例性且示意性地表示第2实施方式涉及的电动机控制装置1110具有的功能模块组的框图。作为读取存储于电动机控制装置1110的处理器或存储器等的控制程序的结果,例如能够通过硬件和软件的协同来实现图14所示的功能模块组。但是,在第2实施方式中,图14所示的功能模块组一部分或全部也可以通过专用硬件(电路)实现。
如图14所示,电动机控制装置1110包括判断部1401、减振器扭矩计算部1402、滤波处理部1403、反相扭矩计算部1404、滤波处理部1405、校正量计算部1406、校正処理部1407、指令决定部1408、以及控制部1409。另外,电动机控制装置1110作为控制用数据具备相位校正用对应图1411及振幅校正用对应图1412。
判断部1401基于油门踏板位置传感器1133及离合器位置传感器1134的检测结果,判断是否需要输出通过抵消减振器扭矩来降低传动轴1123的振动的电机扭矩。此外,之后有时会将用于降低传动轴1123的振动的电机扭矩称为防振扭矩。
例如,在离合器1105处于断开状态时,或者虽然离合器1105处于连接状态但未进行加速操作时等,发动机扭矩的波动并不传递至传动轴1123,因此无需输出防振扭矩。因此,在这种情况下,判断部1401将无需输出防振扭矩的主旨通知给指令决定部1408,以使防振扭矩为零。
另一方面,在离合器1105处于连接状态且进行加速操作时,发动机扭矩的波动传递至传动轴1123,因此需要通过防振扭矩降低振动。因此,在这种情况下,判断部1401将需要输出防振扭矩的主旨通知给指令决定部1408,以输出用于抵消减振器扭矩的防振扭矩。
减振器扭矩计算部1402基于曲柄角传感器1131及电机角度传感器1132的检测结果,通过之后说明的运算,计算(估算)作为与输入惯性部件1201和输出惯性部件1202之间的扭转角对应的扭转扭矩的、计算上的减振器扭矩。
即,在将作为曲柄角传感器1131的检测结果的曲柄角设为θ1,将作为电机角度传感器1132的检测结果的电机角度设为θ2时,减振器扭矩计算部1402基于表示θ1和θ2的差值的公式(θ1-θ2),计算输入惯性部件1201和输出惯性部件1202之间的扭转角。此外,在将减振器1104的旋转弹簧常数设为K时,减振器扭矩计算部1402基于用公式(θ1-θ2)表示的减振器1104的扭转角和弹性部件1221的旋转弹簧常数K之间的相乘,计算计算上的减振器扭矩。
滤波处理部1403对减振器扭矩计算部1402计算结果进行滤波处理,来抽取与发动机1101的点火引爆的一阶频率对应的振动分量。滤波处理部1403例如通过带通滤波器实现上述的抽取处理,该带通滤波器将与发动机1101的点火引爆的一阶频率对应的频率范围作为通过带宽。
反相扭矩计算部1404通过对滤波处理部1403的抽取结果执行相位的反转处理等,计算作为计算防振扭矩的基础的、与估算而得的减振器扭矩反相的反相扭矩。
可是,如前述那样,第2实施方式涉及的减振器1104中真正需要抵消的减振器扭矩为由弹性部件1221产生的扭转扭矩和由动力吸振器1211产生的动力吸振扭矩的合成扭矩。
相对于此,作为计算反相扭矩的基础而被输入至反相扭矩计算部1404的、计算上的减振器扭矩为,基于输入惯性部件1201和输出惯性部件1202之间的扭转角计算出的值,即仅与由弹性部件1221产生的扭转扭矩对应的值。
因此,为了有效降低与减振器扭矩对应地产生的振动,需要对由反相扭矩计算部1404计算出的反相扭矩进行因由动力吸振器1211产生的动力吸振扭矩而产生的偏离(上述的相位偏移及振幅偏差)的校正。
因此,第2实施方式通过以下说明的结构,计算用于分别校正上述的相位偏移及振幅偏差的相位校正量及振幅校正量,并基于计算结果来校正由反相扭矩计算部1404计算出的反相扭矩。
滤波处理部1405对曲柄角传感器1131及电机角度传感器1132的检测结果进行滤波处理,来抽取与发动机1101的点火引爆的一阶频率对应的振动分量。与上述的滤波处理部1403同样地,滤波处理部1405例如通过带通滤波器实现上述的抽取处理,该带通滤波器将与发动机1101的点火引爆的一阶频率对应的频率范围作为通过带宽。
校正量计算部1406基于滤波处理部1405的抽取结果、以及油门踏板位置传感器1133和变速杆位置传感器1135的检测结果,计算相位校正量及振幅校正量,该相位校正量及振幅校正量用于分别校正因由动力吸振器1211产生的动力吸振扭矩而产生的、由减振器1104产生的实际减振器扭矩和计算上的减振器扭矩(由弹性部件1221产生的扭转扭矩)之间的相位偏移及振幅偏差。
首先,说明需要在反相扭矩的相位分量上加上或减去的相位校正量的计算方法。
校正量计算部1406基于第1值与第2值的差值计算相位校正量,该第1值对应假设不产生动力吸振扭矩时的假定的曲柄角和电机角度的相位差,该第2值对应由曲柄角传感器1131检测出的曲柄角和由电机角度传感器1132检测出的电机角度的、与发动机1101的点火引爆的一阶频率对应的振动分量的相位差。此外,之后,有时会将第1值表示为参考相位差,将第2值表示为实际相位差。
实际相位差能够基于滤波处理部1405的抽取结果计算出。即,如上所述,滤波处理部1405抽取作为曲柄角传感器1131的检测结果的曲柄角、以及作为电机角度传感器1132的检测结果的电机角度的各自振动分量,上述振动分量与发动机1101的点火引爆的一阶频率对应,因此校正量计算部1406通过对比这些抽取结果,来以例如之后的图15所示的形式计算相位校正量。
图15为示例性且示意性地表示第2实施方式涉及的曲柄角和电机角度的相位差的一个示例的图。在图15所示的示例中,实线L1501表示曲柄角的、与发动机1101的点火引爆的一阶频率对应的振动分量的历时变化;实线L1502表示电机角度的、与发动机1101的点火引爆的一阶频率对应的振动分量的历时变化。
如图15所示的那样,曲柄角超过规定阈值Th′的时刻T1′和电机角度超过规定阈值Th′的时刻T2′之间存在规定时差Δta′(=T1′-T2′)。校正量计算部1406基于滤波处理部1405的抽取结果获得时差Δta′,并基于该时差Δta′计算实际相位差。以上述方式计算出的实际相位差是基于与电机角度及曲柄角相关的信息的实测值而得到的,因此为反映了减振器1104的实际结构的值,即考虑了扭转扭矩及动力吸振器扭矩这两方的影响的值。
此外,在图15所示的示例中,实际相位差也可以基于曲柄角低于规定阈值Th′的时刻、以及电机角度低于规定阈值Th′的时刻的差值计算。
另一方面,参考相位差可以基于曲柄角传感器1131及变速杆位置传感器1135的检测结果和如之后的图16所示那样的相位校正用对应图1411计算。相位校正用对应图1411为“第1对应图”的一个示例。
图16为示例性且示意性地表示第2实施方式涉及的相位校正用对应图1411的一个示例的图。如图16所示,相位校正用对应图1411为作为表示发动机1101的转速、变速器1103的变速级、和参考相位差的关系的信息而预设的数据。
在相位校正用对应图1411中,发动机1101的转速和参考相位差的关系被定义为与变速级的档位对应的多个线(实线L1601、虚线L1602、点画线L1603、以及双点画线L1604)。实线L1601对应在低速~中速(例如,第1速~第3速)的变速级中发动机1101的转速和参考相位差的关系;虚线L1602对应在比实线L1601的变速级高速(例如,第4速)的变速级中发动机1101的转速和参考相位差的关系。另外,点画线L1603对应在比虚线L1602的变速级更高速(例如,第5速)的变速级中发动机1101的转速和参考相位差的关系;双点画线L1604对应在最高速(例如,第6速)的变速级中发动机1101的转速和参考相位差的关系。
根据相位校正用对应图1411,从上述多个线中选择与基于变速杆位置传感器1135的检测结果获得的变速级对应的一条线,并抽取与基于曲柄角传感器1131的检测结果获得的发动机1101的转速对应的点,由此能够容易确定与状况对应的适当的参考相位差。
如上所述,在第2实施方式中,校正量计算部1406基于由曲柄角传感器1131检测出的发动机1101的转速、以及由变速杆位置传感器1135检测出的变速器1103的变速级并参照相位校正用对应图1411,来获得参考相位差。此外,参考相位差为基于不产生动力吸振扭矩的假设而得到的值,因此可以认为是扭转扭矩及动力吸振扭矩中仅考虑了扭转扭矩的影响的值。
在第2实施方式中,校正量计算部1406基于以上述方法获得的实际相位差和参考相位差的差值,计算需要在反相扭矩的相位分量上加上或减去的相位校正量。如上所述,实际相位差为考虑了扭转扭矩及动力吸振器扭矩这两方的影响的值,参考相位差为仅考虑了扭转扭矩的影响的值,由此在将实际相位差设为Δta′,将参考相位差设为Δtb′时,通过表示两者差值的公式(Δta′-Δtb′)计算出的相位校正量对应因动力吸振扭矩的影响而产生的相位偏移。
接着,说明需要在反相扭矩的振幅分量上乘上的振幅校正量的计算方法。
校正量计算部1406基于由曲柄角传感器1131检测出的发动机1101的转速、以及由变速杆位置传感器1135检测出的变速器1103的变速级并参照之后的图17所示的振幅校正用对应图1412,来计算振幅校正量。振幅校正用对应图1412为“第2对应图”的一个示例。
图17为示例性且示意性地表示第2实施方式涉及的振幅校正用对应图1412的一个示例的图。如图17所示,振幅校正用对应图1412为作为表示发动机1101的转速、变速器1103的变速级、和振幅校正量的关系的信息而预设的数据。
在振幅校正用对应图1412中,发动机1101的转速和振幅校正量的关系被定义为与变速级的档位对应的多个线(实线L1701、虚线L1702、点画线L1703、以及双点画线L1704)。实线L1701对应在低速~中速(例如,第1速~第3速)的变速级中发动机1101的转速和振幅校正量的关系;虚线L1702对应在比实线L1701的变速级高速(例如,第4速)的变速级中发动机1101的转速和振幅校正量的关系。另外,点画线L1603对应在比虚线L1702的变速级更高速(例如,第5速)的变速级中发动机1101的转速和振幅校正量的关系;双点画线L1704对应在最高速(例如,第6速)的变速级中发动机1101的转速和振幅校正量的关系。
根据振幅校正用对应图1412,从上述多个线中选择与基于变速杆位置传感器1135的检测结果获得的变速级对应的一条线,并抽取与基于曲柄角传感器1131的检测结果获得的发动机1101的转速对应的点,由此能够容易确定与状况对应的适当的振幅校正量。
根据上述方法,在第2实施方式中,校正量计算部1406基于滤波处理部1405的抽取结果、由曲柄角传感器1131和变速杆位置传感器1135的检测结果、以及相位校正用对应图1411和振幅校正用对应图1412,来获得分别与因动力吸振扭矩而产生的实际的减振器扭矩和计算上的减振器扭矩之间的相位偏移及振幅偏差对应的相位校正量及振幅校正量。
另外,返回图12,校正処理部1407基于由校正量计算部1406计算出的相位校正量及振幅校正量分别校正由反相扭矩计算部1404计算出的反相扭矩的相位分量及振幅分量。更具体地,校正処理部1407使反相扭矩的相位分量偏移(延迟)相位校正量的分量,并且在反相扭矩的振幅分量上乘上振幅校正量。由此,消除因动力吸振扭矩而对反相扭矩(计算上的减振器扭矩)产生的相位偏移及振幅偏差的影响,进而能够计算可适当地抵消作为扭转扭矩和动力吸振扭矩这两方的合成扭矩的实际减振器扭矩的防振扭矩。
此外,如上所述的校正処理在将反相扭矩设为Tq′,将相位校正量设为Δt′,将振幅校正量设为G′,将控制周期设为Ts′时,能够通过利用了延迟算子z
在由判断部1401判断为需要输出防振扭矩时,指令决定部1408基于由校正処理部1407计算出的防振扭矩,决定发给电动发电机1102的电机扭矩指令。
并且,控制部1409基于由指令决定部1408决定的电机扭矩指令驱动电动发电机1102。
如上所述,指令决定部1408及控制部1409作为电机扭矩指令输出部发挥功能,该电机扭矩指令输出部基于根据作为校正量计算部1406的计算结果的相位校正量及振幅校正量而被校正的反相扭矩,输出发给电动发电机1102的电机扭矩指令。
基于以上结构,第2实施方式涉及的电动机控制装置1110按照之后的图18所示的处理流程执行一系列的处理。
图18为示例性且示意性地表示第2实施方式涉及的电动机控制装置1110执行的一系列的处理的流程图。
如图18所示,在第2实施方式中,首先,在S1801中,电动机控制装置1110的判断部1401判断是否需要通过防振扭矩进行防振。如上所述,该判断基于油门踏板位置传感器1133的检测结果、及离合器位置传感器1134的检测结果进行。
在S1801中,判断为需要进行防振时,处理会移动至S1802。另外,在S1802中,电动机控制装置1110的减振器扭矩计算部1402通过基于曲柄角传感器1131的检测结果、电机角度传感器1132的检测结果、以及减振器1104的旋转弹簧常数的上述运算,计算计算上的减振器扭矩。
另外,在S1803中,电动机控制装置1110的滤波处理部1403对在S1802中计算出的、计算上的减振器扭矩执行滤波处理。如上所述,该在S1803中执行的滤波处理为从计算上的减振器扭矩中抽取与发动机1101的点火引爆的一阶频率对应的振动分量的处理。
另外,在S1804中,电动机控制装置1110的反相扭矩计算部1404通过对S1803的处理结果执行相位的反转处理等,计算与计算上的减振器扭矩反相的反相扭矩。
另外,在S1805中,电动机控制装置1110的滤波处理部1405对作为曲柄角传感器1131及电机角度传感器1132的各自检测结果的曲柄角及电机角度执行滤波处理。如上所述,该在S1805中执行的滤波处理为从曲柄角及电机角度中抽取与发动机1101的点火引爆的一阶频率对应的振动分量的处理。
另外,在S1806中,电动机控制装置1110的校正量计算部1406基于在S1805中抽取的两个振动分量的差值,计算实际相位差,作为考虑了由弹性部件1221产生的扭转扭矩及由动力吸振器1211产生的动力吸振器扭矩这两方的影响的值。
另外,在S1807中,电动机控制装置1110的校正量计算部1406基于从曲柄角传感器1131的检测结果获得的发动机1101的转速、以及从变速杆位置传感器1135的检测结果获得的变速器1103的变速级并参照相位校正用对应图1411,计算参考相位差,作为仅考虑了由弹性部件1221产生的扭转扭矩的影响的值。
另外,在S1808中,电动机控制装置1110的校正量计算部1406基于在S1806中计算出的实际相位差和在S1807中计算出的参考相位差的差值,计算与因动力吸振扭矩的影响而产生的相位偏移对应的相位校正量。
另外,在S1809中,电动机控制装置1110的校正量计算部1406基于从曲柄角传感器1131的检测结果获得的发动机1101的转速、以及从变速杆位置传感器1135的检测结果获得的变速器1103的变速级并参照振幅校正用对应图1412,由此计算与因动力吸振扭矩的影响而产生的振幅偏差对应的振幅校正量。
另外,在S1810中,电动机控制装置1110的校正処理部1407根据在S1808及S1809中分别计算出的相位校正量及振幅校正量,对在S1804中计算出的反相扭矩进行校正。更具体地,校正処理部1407在反相扭矩的相位分量上加上或减去相位校正量,并且在反相扭矩的振幅分量上乘上振幅校正量。由此,消除因动力吸振扭矩而对反相扭矩(计算上的减振器扭矩)产生的相位偏移及振幅偏差的影响,进而能够计算可适当地抵消作为扭转扭矩和动力吸振扭矩这两方的合成扭矩的实际减振器扭矩的防振扭矩。
另外,在S1811中,电动机控制装置1110的指令决定部1408决定用于产生防振扭矩的电机扭矩指令,该防振扭矩为与在S1810中被校正的反相扭矩对应的电机扭矩。
另外,在S1812中,电动机控制装置1110的控制部1409向电动发电机1102输出在S1811中决定的电机扭矩指令。由此,处理结束。
此外,在第2实施方式中,在S1801中判断为需要进行防振时,处理移动至S1813。此时,由于不需要输出防振扭矩,在S1813中,电动机控制装置1110的指令决定部1408决定用于使电机扭矩为零的电机扭矩指令。
S1813的处理后,与S1811的处理后相同地,处理移动至S1812。另外,在S1812中,电动机控制装置1110的控制部1409向电动发电机1102输出在S1813中所决定的、用于使电机扭矩为零的电机扭矩指令。由此,处理结束。
如上所示,第2实施方式涉及的电动机控制装置1110适用于包括减振器1104的车辆V,该减振器1104具有与曲柄轴1121连接的输入惯性部件1201、经由弹性部件1221与该输入惯性部件1201连接的输出惯性部件1202、以及设置于该输出惯性部件1202的动力吸振器1211。
另外,第2实施方式涉及的电动机控制装置1110包括减振器扭矩计算部1402、反相扭矩计算部1404、校正量计算部1406、以及作为电机扭矩指令输出部的指令决定部1408和控制部1409。减振器扭矩计算部1402基于由曲柄角传感器1131检测出的曲柄角和由电机角度传感器1132检测出的电机角度的差值,计算减振器1104根据发动机扭矩的波动而产生的、计算上的减振器扭矩。反相扭矩计算部1404计算与由减振器扭矩计算部1402计算出的、计算上的减振器扭矩反相的反相扭矩。校正量计算部1406至少基于由曲柄角传感器1131检测出的曲柄角、以及由电机角度传感器1132检测出的电机角度,计算相位校正量及振幅校正量,该相位校正量及振幅校正量用于分别校正因由动力吸振器1211产生的动力吸振扭矩而产生的、减振器1104产生的实际减振器扭矩和计算所得的减振器扭矩之间的相位偏移及振幅偏差。指令决定部308及控制部309基于根据相位校正量及振幅校正量而被校正的反相扭矩,输出发给电动发电机1102的电机扭矩指令。
根据上述结构,能够基于相位校正量及振幅校正量,校正反相扭矩,以消除因动力吸振扭矩而产生的相位偏移及振幅偏差,并输出与校正后的反相扭矩对应的电机扭矩指令,由此能够降低与包括动力吸振器的减振器的减振器扭矩对应地产生的振动。
此外,在第2实施方式中,指令决定部308及控制部309在设置于发动机1101和变速器1103之间的离合器1105处于将曲柄轴1121与输入轴1124连接的连接状态时,输出电机扭矩指令;在离合器1105处于断开曲柄轴1121与输入轴1124的连接的断开状态时,输出使电机扭矩为零的电机扭矩指令。根据上述结构,根据减振器扭矩是否是经由离合器传递至车轮W侧,能够切换是否产生用于降低该减振器扭矩的影响的电机扭矩。
此外,在第2实施方式中,指令决定部308及控制部309即使在离合器1105处于连接状态时,在未进行使车辆V加速的加速操作的情况下,输出使电机扭矩为零的电机扭矩指令。根据上述结构,除离合器1105的状态外进一步考虑加速操作的与否,根据减振器扭矩是否是经由离合器传递至车轮W侧,能够切换是否产生用于降低该减振器扭矩的影响的电机扭矩。
另外,在第2实施方式中,校正量计算部1406基于参考相位差(第1值)与实际相位差(第2值)的差值计算相位校正量,该参考相位差对应假设不产生动力吸振扭矩时的假定的曲柄角和电机角度的相位差,该实际相位差对应由曲柄角传感器1131检测出的曲柄角和由电机角度传感器1132检测出的电机角度的、与发动机1101的点火引爆的一阶频率对应的振动分量的相位差。根据上述结构,基于参考相位差和实际相位差的差值,能够容易获得与因动力吸振扭矩而产生的相位偏移对应的相位校正量。
另外,在第2实施方式中,校正量计算部1406基于由曲柄角传感器1131检测出的发动机1101的转速、以及由变速杆位置传感器1135检测出的变速器1103的变速级,获得参考相位差。根据该结构,考虑被认为是参考相位差的变化的因数的发动机1101的转速以及变速器1103的变速级,能够获得适当的参考相位差。
更具体地,在第2实施方式中,电动机控制装置1110进一步具备表示发动机1101的转速、变速器1103的变速级、和参考相位差的关系的相位校正用对应图1411,校正量计算部1406基于由曲柄角传感器1131检测出的发动机1101的转速、以及由变速杆位置传感器1135检测出的变速器1103的变速级并参照相位校正用对应图1411,获得参考相位差。根据该结构,利用相位校正用对应图1411,能够容易获得适当的参考相位差。
另外,在第2实施方式中,校正量计算部1406基于由曲柄角传感器1131检测出的发动机1101的转速、以及由变速杆位置传感器1135检测出的变速器1103的变速级,获得振幅校正量。根据该结构,考虑被认为是与因动力吸振扭矩而产生的振幅偏差对应的振幅校正量的变化的因数的发动机1101的转速以及变速器1103的变速级,能够获得适当的振幅校正量。
更具体地,在第2实施方式中,电动机控制装置1110进一步具备表示发动机1101的转速、变速器1103的变速级、和振幅校正量的关系的振幅校正用对应图1412,校正量计算部1406基于由曲柄角传感器1131检测出的发动机1101的转速、以及由变速杆位置传感器1135检测出的变速器1103的变速级并参照振幅校正用对应图1412,获得振幅校正量。根据该结构,利用振幅校正用对应图1412,能够容易获得适当的振幅校正量。
接着,进一步简单阐述第2实施方式的效果。
图19为示例性且示意性地表示第2实施方式的效果的模拟结果的图。此外,图19的纵轴的“D/S扭矩”的表现表示传动轴扭矩。
在图19所示的示例中,实线L1901表示通过考虑了动力吸振扭矩的影響并计算防振扭矩的第2实施方式涉及的技术而实现的、发动机1101的转速和传动轴扭矩的波动的关系。另外,虚线L1902表示通过基于相同于现有的技术构思不考虑动力吸振扭矩的影响并计算防振扭矩的第2比较例涉及的技术而实现的、发动机1101的转速和传动轴扭矩的波动的关系。此外,点画线L1900表示在完全不进行防振扭矩的防振时的发动机1101的转速和传动轴扭矩的波动的关系。
分别对比点画线L1900、实线L1901、及虚线L1902可知,根据第2实施方式涉及的技术,与第2比较例涉及的技术相比,能够使传动轴扭矩的波动变小。这是因为,在第2实施方式涉及的技术中,与第2比较例涉及的技术不同地,考虑了因动力吸振扭矩而产生的相位偏移及振幅偏差,适当地校正基于与扭转扭矩对应的、计算上的减振器扭矩的反相扭矩,在此基础上决定防振扭矩。
如上所述,根据第2实施方式涉及的技术,与第2比较例涉及的技术相比,能够获得更高的防振効果。
此外,在上述第2实施方式中,基于相位校正量及振幅校正量这两方进行了反相扭矩的校正。但是,也可以仅基于相位校正量及振幅校正量中的一方对反相扭矩进行校正,例如,相比于完全不校正时,能够获得可一定程度抵消实际减振器扭矩的防振扭矩。
另外,在上述第2实施方式中示出了,本发明的技术适用于将动力吸振器设置于输出惯性部件的减振器的示例。但是,本发明的技术,也可以适用于将动力吸振器设置于输入惯性部件及输出惯性部件中至少一方的结构。
另外,在上述第2实施方式中,发动机的转速可以通过除了利用曲柄角传感器的检测结果的方法以外的方法求得,变速器的变速级可以通过除了利用变速杆位置传感器的检测结果的方法以外的方法求得。例如,在驱动系统的状态处于向传动轴传递扭矩的传递状态时,发动机的转速及变速器的变速级可以根据电动发电机的转速等求得。另外,变速器的变速级可以根据变速器的输入轴与输出轴(在第2实施方式中未图示)的转速比等求得。
以上对本发明的实施方式进行了说明,但上述的实施方式仅为一例,并不用于限定发明的范围。上述的新的实施方式能够以各种方式来实施,在不脱离发明的要旨的范围内,可以进行各种省略、替换、以及变更。上述的实施方式以及其变形,均包含于发明的范围及要旨内,并且包含于权利要求书记载的发明及其等同范围内。
符号说明
101 发动机
102 电动发电机
103 变速器
104 减振器
105 离合器
110 电动机控制装置
121 曲柄轴
122 电动机轴
124 输入轴
402 减振器扭矩计算部
404 反相扭矩计算部
406 校正量计算部
408 指令决定部(电机扭矩指令输出部)
409 控制部(电机扭矩指令输出部)
411 特性对应图(对应图)
1101 发动机
1102 电动发电机
1103 变速器
1104 减振器
1105 离合器
1110 电动机控制装置
1121 曲柄轴
1122 电动机轴
1124 输入轴
1402 减振器扭矩计算部
1404 反相扭矩计算部
1406 校正量计算部
1408 指令决定部(电机扭矩指令输出部)
1409 控制部(电机扭矩指令输出部)
1411 相位校正用对应图(第1对应图)
1412 振幅校正用对应图(第2对应图)
- 电动机控制装置、具备该电动机控制装置的电动机单元、具备电动机单元的汽车以及电动机控制方法
- 电动机控制装置以及具备该电动机控制装置的电动机