智能消毒机器人消毒主控器及其消毒控制方法
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及一种消毒机器人,尤其是涉及一种使用于公共场合进行卫生环境消毒的智能消毒机器人消毒主控器及其消毒控制方法。
背景技术
随着人们对各种公共场合的环境卫生要求越来越高,对公共场合消毒处理也越来越受到各公众场合管理部门及相关公众的高度重视,但是使用传统人工消毒操作方式进行消毒处理则存在着人工消毒成本高,消毒效率低,也很难做到24小时无死角全方位的进行消毒处理,导致消毒不充分,消毒管理难度大,公共环境卫生健康安全隐患大等缺陷问题;并且在某些特殊场合也不适合进行人工消毒,采用人工消毒处理方式有着较大局限性,并且人工消毒处理本身的消毒操作人员本身也可能受到消毒操作过程中的身心健康不利影响。
因此需要一台人性化的消毒设备,以AGV底盘为基础,设计出智能消毒机器人,在机器人内部装置消毒系统产生消毒气体,利用机器人的气动系统将消毒气体快速的在公共场合的室内或室外空间扩散,以达到增加消毒的覆盖面和均匀性,能有效、无死角地杀灭空气中的致病微生物,消毒机器人能够根据设定的路线自动、高效、精准的对室内进行消毒防疫。但是实现上述消毒功能还需解决一个问题,现有AGV底盘以及后台、前端存在着无法直接控制机器人内部的消毒系统运行,无法控制消毒系统中包括紫外灯控制、水位控制、消毒气体生成,风扇运行等这些功能,都无法通过底盘和软件来直接实现控制,因此需要设计开发一块消毒系统主控板,并提供接口给软件后台,接收后台操作命令。
发明内容
本发明为解决现有公共场合的环境卫生消毒处理存在着人工消毒成本高,消毒效率低,也很难做到24小时无死角全方位的进行消毒处理,导致消毒不充分,消毒管理难度大,公共环境卫生健康安全隐患大等缺陷;而采用现有机器人AGV底盘以及后台、前端则存在着无法直接控制机器人内部的消毒系统运行,无法直接紫外灯控制、控制水位、消毒气体生成,风扇运行等消毒系统功能现状而提供的一种可以联动控制机器人底盘和消毒系统功能,实现消毒机器人对公共场合的环境卫生自动消毒处理,提高消毒处理效率,消毒控制灵活安全,消毒管理成本低,避免或降低公共环境卫生健康安全隐患,提高消毒处理管理人员健康安全性的智能消毒机器人消毒主控器及其消毒控制方法。
本发明为解决上述技术问题所采用的具体技术方案为:一种智能消毒机器人消毒主控器,包括AGV底盘和消毒机器人前端,消毒机器人前端配置有人机交互界面单元,其特征在于:还包括主控制板和设于消毒机器人内部的消毒系统,主控板上设有单片机芯片模块以及控制和连接消毒系统的紫外线灯消毒控制模块、消毒液雾化器控制模块、消毒液雾化器接口端和传感器信号模块,消毒系统包括紫外线消毒灯、紫外线灯保护盖和雾化器升降杆,紫外线灯消毒控制模块、消毒液雾化器控制模块、消毒液雾化器接口端和传感器信号模块分别与单片机芯片模块电连接和/或通讯连接,传感器信号模块用于采集传感器信号并为紫外线灯消毒控制模块和/或消毒液雾化器控制模块提供传感器信号控制接入,AGV底盘和主控制器分别与消毒机器人前端及后台通讯连接。可以有效联动控制机器人底盘和消毒系统功能,实现消毒机器人对公共场合的环境卫生进行自动自动紫外线灯消毒和/或消毒液雾化消毒处理,提高消毒处理效率,消毒控制灵活安全,消毒管理成本低,避免或降低公共环境卫生健康安全隐患,提高消毒处理管理人员健康安全性。
作为优选,所述的单片机芯片模块采用芯片型号为STC15W4K60S4的单片机。提高联动控制机器人底盘和消毒系统功能处理控制简单便捷可靠有效性。
作为优选,所述的紫外线灯消毒控制模块包括多路紫外线灯消毒控制电路,多路紫外线灯消毒控制电路包括多路~220V供电紫外线灯消毒控制电路和多路+12V供电紫外线灯消毒控制电路,每路紫外线灯消毒控制电路分别通过其设置的JD-OUT接口端与单片机芯片的第33功能引脚的P2.3/A11/MOSI_2引脚端、第32功能引脚的P2.2/A11/MOS0_2引脚端、第30功能引脚的P2.0/A8/RSTOUT_LOW引脚端、第28功能引脚的P4.3/SCLK_3引脚端电连接。提高紫外线灯消毒处理的供电应用灵活可靠有效性,提高紫外线灯消毒处理的可靠稳定有效性,提高消毒处理工作的可持续保障有效性。
作为优选,所述的紫外线灯消毒控制模块设有与每路紫外线灯消毒控制电路相对应的紫外线灯保护盖驱动电机接口电路,每路紫外线灯保护盖驱动电机接口电路采用芯片型号为L9110H的马达驱动芯片,每个马达驱动芯片的A路输入管角和B路输入管角分别与单片机对应功能管角电连接。提高紫外线灯消毒平常状态下的人身安全防护性。
作为优选,所述的多路紫外线灯消毒控制电路包括二路~220V供电紫外线灯消毒控制电路和二路+12V供电紫外线灯消毒控制电路,其中第一路~220V供电紫外线灯消毒控制电路的JD-OUT1接口端与单片机芯片的第33功能引脚的P2.3/A11/MOSI_2引脚端电连接,JD-OUT1接口端串联第53电阻后串联接入第19NPN三极管基极,第19NPN三极管集电极串联第52电阻后与第1继电器线圈一端电连接,第1继电器线圈另一端与+5V电源电连接,第1继电器线圈两端并联第15二极管和第16发光二极管,其中第15二极管阴极与+5V电源电连接,第16发光二极管阳极与+5V电源电连接,第第15二极管阴极和第16发光二极管阳极之间串联第51电阻,第1继电器常开触点两端分别与第1紫外线灯接口端子电连接;第一路~220V供电紫外线灯消毒控制电路的JD-OUT11接口端与单片机芯片的第33功能引脚的P2.3/A11/MOSI_2引脚端电连接,JD-OUT11接口端串联第53电阻后串联接入第19NPN三极管基极,第19NPN三极管集电极串联第52电阻后与第1继电器线圈一端电连接,第1继电器线圈另一端与+5V电源电连接,第1继电器线圈两端并联第15二极管和第16发光二极管,其中第15二极管阴极与+5V电源电连接,第16发光二极管阳极与+5V电源电连接,第第15二极管阴极和第16发光二极管阳极之间串联第51电阻,第1继电器常开触点两端分别与第1紫外线灯接口端子电连接;第二路~220V供电紫外线灯消毒控制电路的JD-OUT2接口端与单片机芯片的第31功能引脚的P2.1/A10/MOS0_2引脚端电连接,JD-OUT2接口端串联第57电阻后串联接入第20NPN三极管基极,第20NPN三极管集电极串联第56电阻后与第2继电器线圈一端电连接,第2继电器线圈另一端与+5V电源电连接,第2继电器线圈两端并联第17二极管和第18发光二极管,其中第17二极管阴极与+5V电源电连接,第18发光二极管阳极与+5V电源电连接,第第17二极管阴极和第18发光二极管阳极之间串联第55电阻,第2继电器常开触点两端分别与第2紫外线灯接口端子电连接;第三路~220V供电紫外线灯消毒控制电路的JD-OUT3接口端与单片机芯片的第30功能引脚的P2.0/A18/RSTOUT_LOW引脚端电连接,JD-OUT4接口端串联第65电阻后串联接入第22NPN三极管基极,第22NPN三极管集电极串联第64电阻后与第4继电器线圈一端电连接,第4继电器线圈另一端与+5V电源电连接,第1继电器线圈两端并联第21二极管和第22发光二极管,其中第21二极管阴极与+5V电源电连接,第22发光二极管阳极与+5V电源电连接,第21二极管阴极和第22发光二极管阳极之间串联第63电阻,第4继电器常开触点两端分别与第4紫外线灯接口端子电连接;第五路~220V供电紫外线灯消毒控制电路的JD-OUT5接口端与单片机芯片的第28功能引脚的P4.3/SCLK_3引脚端电连接,JD-OUT5接口端串联第69电阻后串联接入第23NPN三极管基极,第23NPN三极管集电极串联第68电阻后与第5继电器线圈一端电连接,第5继电器线圈另一端与+5V电源电连接,第5继电器线圈两端并联第23二极管和第24发光二极管,其中第23二极管阴极与+5V电源电连接,第24发光二极管阳极与+5V电源电连接,第23二极管阴极和第24发光二极管阳极之间串联第67电阻,第5继电器常开触点两端分别与第5紫外线灯接口端子电连接。提高紫外线灯消毒处理的供电应用灵活可靠有效性,提高紫外线灯消毒处理的可靠稳定有效性,提高消毒处理工作的可持续保障有效性;提高紫外线灯消毒控制电路的电平控制信号跳转简单可靠稳定有效性。
作为优选,所述的消毒液雾化器控制模块包括消毒液雾化器接口端和雾化器开关电路及雾量调节电路,消毒液雾化器接口端包括雾化器电源输入端和雾化器电源输出端,雾化器开关电路及雾量调节电路通过其设置的PWM4端口与单片机芯片模块的单片机第29功能引脚的P4.4/RD/CCP4引脚电连接,雾化器电源输入端的电源端串联第5二极管阴极,第5二极管阳极与第四N沟道MOS管漏极电连接,雾化器电源输出端的+P端引脚串联第5二极管阴极,雾化器电源输出端的H-WZ端引脚并联第5二极管阳极,同时雾化器电源输出端的H-WZ端引脚串联RC串联电路后与第四N沟道MOS管源极并联,第四N沟道MOS管源极与电源地电连接;第四N沟道MOS管栅极与雾化占空比调节电路电连接,雾化占空比调节电路前级电连接至PWM4端口;雾化器电源输出端用于与设于消毒机器人内部的雾化器接口连接;雾化占空比调节电路包括第3NPN三极管、第1PNP三基管和第2PNP三极管,PWM4端口串联第7电阻后与第3NPN三极管基极电连接,第3三极管集电极串联第8电阻后与第1PNP三基管基极电连接,第1PNP三基管集电极与第2PNP三极管基极电连接,第2PNP三极管基极和集电极上并联第10电阻,第2PNP三极发射极串联第10电阻后与第四N沟道MOS管栅极电连接,第1PNP三基管集电极串联第6二极管阳极,第6二极管阴极与第四N沟道MOS管栅极电连接,第3NPN三极管基极串联第9电阻后与第1NPN三极管发射极一起与+12V电源电连接,第3三极管发射极和第2PNP三极管集电极均与电源地电连接。提高消毒液雾化器控制电路的电平信号控制简单可靠稳定有效性。
作为优选,所述的雾化气动控制模块包括雾化气动装置电源输出接口端和气动开关调节电路,气动开关调节电路通过其设置的PWM3端口端与单片机芯片模块的单片机第27功能引脚的P4.2/WR/CCP3引脚电连接,气动装置电源输出接口端的+P端引脚串联第4二极管阴极同时与电源+12V电连接,气动装置电源输出接口端的H-WZ端引脚与第六N沟道MOS管漏极电连接,同时气动装置电源输出接口端的H-WZ端引脚串联RC串联电路后与第六N沟道MOS管源极电连接,第六N沟道MOS管源极与电源地电连接,第六N沟道MOS管栅极与气动占空比调节电路电连接,气动占空比调节电路前级电连接至PWM3端口,气动装置电源输出接口端用于与设于消毒机器人内部的气动开关装置接口连接;气动占空比调节电路包括第4NPN三极管、第2PNP三基管和第8PNP三极管,PWM3端口串联第7电阻后与第4NPN三极管基极电连接,第4三极管集电极串联第5电阻后与第2PNP三基管基极电连接,第2PNP三基管集电极与第8PNP三极管基极电连接,第8PNP三极管基极和集电极上并联第17电阻,第8PNP三极发射极串联第11电阻后与第六N沟道MOS管栅极电连接,第2PNP三基管集电极串联第6二极管阳极,第6二极管阴极与第六N沟道MOS管栅极电连接,第4NPN三极管基极串联第3电阻后与第2NPN三极管发射极一起与+12V电源电连接,第4三极管发射极和第8PNP三极管集电极均与电源地电连接。提高雾化气动控制模块电路的电平信号控制简单可靠稳定有效性,提高消毒液雾化气动控制简单便捷可靠有效性。
作为优选,所述的AGV底盘和主控制器分别与消毒机器人前端及后台采用485通讯连接,通过MAX485芯片通讯模块与后台数据通讯连接,其中主控制器上设有后台数据传输接口端子和环境数据采集接口端子,数据传输接口端子分别通过USART4_RX端口和USART4_TX端口分别与单片机芯片模块的单片机第43功能引脚的P0.2/AD2/RXD4引脚和第44功能引脚的P0.3/AD3/TXD4电连接,环境数据采集接口端子分别通过USART2_RX端口和USART2_TX端口分别单片机芯片模块的单片机第4功能引脚的P1.0/ADC0/CCP1/RXD2引脚和第5功能引脚的P1.1/ADC1/CCP0/TXD2电连接。提高AGV底盘和主控制器分别与消毒机器人前端及后台通讯控制稳定可靠有效性,提高消毒处理效率,降低人员成本。
作为优选,所述的传感器信号模块包括信号输入接口端和传感器电平信号控制电路,信号输入接口端采用3P接口端结构的六个信号输入接口端,每个信号输入接口端括+24v电源接口端子、传感器接口端子和电源地接口端子,六个信号输入接口端中的四个用于采集紫外线灯保护盖到位的传感器信号输入接口,另一个用于采集升降杆降到位的传感器信号输入接口,消毒液雾化器控制模块在停止喷雾后,消毒液雾化器控制模块执行控制升降杆的下降动作并检测降到位传感器信号;其中第一传感器、第二传感器、第三传感器、第四传感器和第五传感器信号输入端分别与各自对应的光电耦合器输入端的发光二极管阴极输入端电连接,再从光电耦合器输出端的光敏三极管集电极输出端电连接至机械臂转接控制板中设置的MCU处理芯片上的传感器反馈输入接口端。提高
本发明申请的另一个发明目的在于提供一种智能消毒机器人消毒主控器的消毒控制方法,其特征在于:包括消毒控制执行步骤
A1.根据消毒任务执行需求,选择采用紫外线灯单独消毒、消毒液喷雾单独升降消毒、紫外线灯消毒和消毒液升降消毒组合消毒方式中的一种消毒处理方式;
A2.后台根据选定的一种消毒处理方式,发送消毒执行命令任务给消毒机器人前端;
A3.消毒机器人前端收到消毒执行命令任务时,首先下达执行命令给AGV底盘,使AGV底盘到达正常的预设工作点位,并在预设的点位间移动;
A4. AGV底盘到达正常工作点位后,并在预设的点位间移动同时,消毒机器人前端发送执行命令任务给上述技术方案之一所述的智能消毒机器人消毒主控器,主控器接收到执行命令任务之后开始自动运行消毒执行任务,开始执行紫外线灯消毒和/或抬高升降杆输出防疫消毒喷雾;
A5. 主控器在执行消毒喷雾任务的工作过程中,实时采集环境数据紫外线灯状态、环境数据信息和/或消毒液位数据信息,并上传紫外线灯状态、环境数据和/或消毒液位状态信息反馈返回给消毒机器人前端和/或后台;
上述第A4执行步骤中,主控制器在执行紫外线灯消毒和/或抬高升降杆输出防疫消毒喷雾同时,根据实际执行任务情况同步执行工作状态指示、雾量液位控制和/或环境数据采集任务;
上述第A4执行步骤中,在执行具有抬高升降杆输出防疫消毒喷雾的消毒命令处理时,升降杆抬升到喷雾头升降到设定喷雾高度时,消毒液雾化器控制模块控制开始雾化喷雾消毒处理,在消毒液消毒处理完后,停止消毒液的喷雾消毒处理,升降杆降低回归至初始高度位置;
上述第A4执行步骤中,在执行具有紫外线灯消毒命令处理时,紫外线灯消毒控制模块控制每路紫外线灯保护盖驱动电机接口电路控制紫外灯保护开关05打开紫外线灯保护盖,多路~220V供电紫外线灯消毒控制电路和/或多路+12V供电紫外线灯消毒控制电路开始控制紫外灯开关打开紫外线消毒灯开始消毒,而在平常不执行紫外线灯消毒命令时,紫外线消毒灯隐藏在机器人体内;
在执行消毒任务前,根据实际情况或消毒需求情况,在消毒机器人前端的人机交互界面上设置主控制器的消毒任务过程中消毒雾化器的雾量及风速控制的参数设置。
本发明的有益效果是:气动装置电源输出接口端用于与设于消毒机器人内部的气动开关装置接口连接;消毒液雾化器接口端用于与设于消毒机器人内部的雾化器接口连接。可以有效联动控制机器人底盘和消毒系统功能,实现消毒机器人对公共场合的环境卫生进行自动紫外线灯消毒和/或消毒液雾化消毒处理,提高消毒处理效率,消毒控制灵活安全,消毒管理成本低,避免或降低公共环境卫生健康安全隐患,提高消毒处理管理人员健康安全性。可以控制使消毒液雾化器或喷雾装置实现升降功能,通过升降传感器,可使升降杆自带保护功能,防止升降杆过载,升降功能可应对不同高度环境设置不同喷雾高度,提高喷雾消毒处理高度区域范围调节性。可以极大的减少人工费,管理费,设定好地图以及任务后,每天都可以自动执行任务,无需在人为干预,大大减少成本。从生产成本方面由于只采用一块控制板(控制板主要由单片机驱动),成本较低,且安装更加简便,减少了很多不必要的走线,使内部配电箱的外观更加整洁、明朗,可以缩短大量的生产时间,减少生产成本,维修也更加方便。从使用寿命上来看,主控板采用和AGV底盘主控一样的材质以及一样的MCU,保证了使用寿命不低于AGV底盘。主控制器的主控板本身可以处理简单的运行逻辑,无需后台参与,并且可以直接连接后台与前端,响应速度快,丢包率低,体积小,可通过一个主控器完成消毒机器人的所有外设控制。
附图说明:
下面结合附图和具体实施方式对本发明做进一步的详细说明。
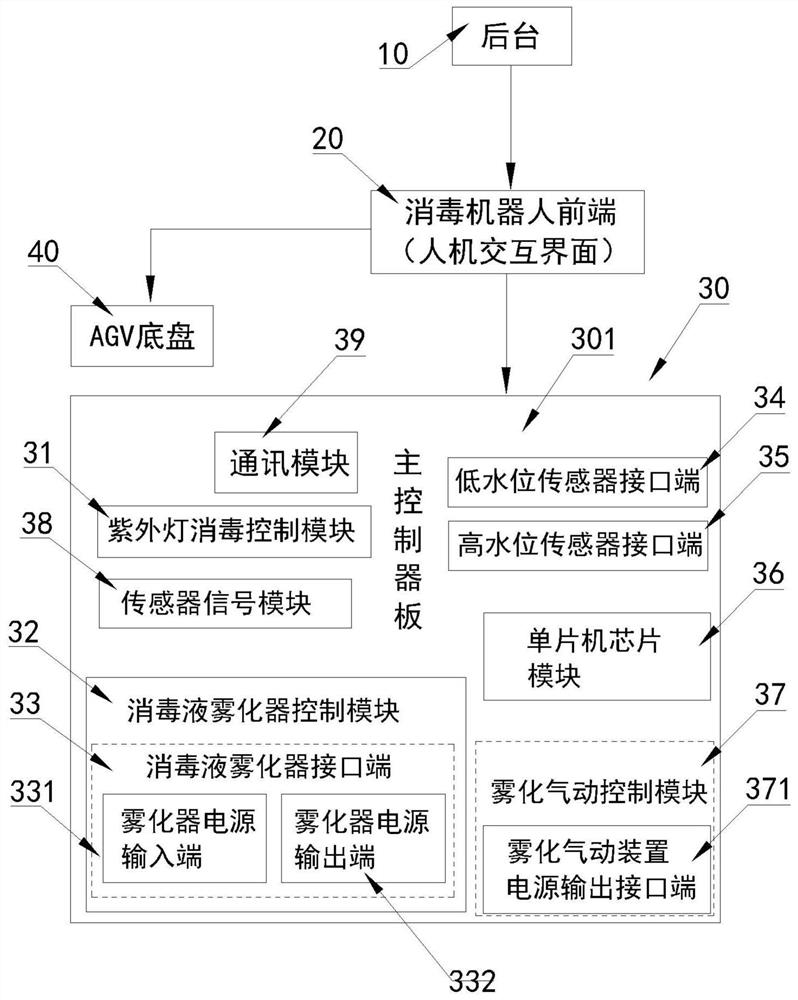
图1是本发明智能消毒机器人消毒主控器及其消毒控制方法的原理结构框图示意图。
图2是本发明智能消毒机器人消毒主控器及其消毒控制方法的控制流程示意图。
图3是本发明智能消毒机器人消毒主控器及其消毒控制方法中采用的MCU处理电路结构示意图。
图4是本发明智能消毒机器人消毒主控器及其消毒控制方法中消紫外线灯保护盖驱动电机接口电路的电路结构示意图。
图5是本发明智能消毒机器人消毒主控器及其消毒控制方法中紫外线灯消毒控制模块的电路结构示意图。
图6是本发明智能消毒机器人消毒主控器及其消毒控制方法中传感器信号模块的电路结构示意图。
图7是本发明智能消毒机器人消毒主控器及其消毒控制方法中消毒液雾化器接口端的电路结构示意图。
图8是本发明智能消毒机器人消毒主控器及其消毒控制方法中雾化气动装置接口端的电路结构示意图。
图9是本发明智能消毒机器人消毒主控器及其消毒控制方法中后台数据传输接口端的电路结构示意图。
具体实施方式
实施例:
图1、图2、图3、图4、图5、图6、图7、图8、图9所示的实施例中,一种智能消毒机器人消毒主控器,包括AGV底盘40和消毒机器人前端20,消毒机器人前端20配置有人机交互界面单元,还包括主控制器板301和设于消毒机器人内部的消毒系统,主控器板301上设有单片机芯片模块36以及控制和连接消毒系统的紫外线灯消毒控制模块31、消毒液雾化器控制模块32、消毒液雾化器接口端33和传感器信号模块38,消毒系统包括紫外线消毒灯、紫外线灯保护盖和雾化器升降杆,紫外线灯消毒控制模块31、消毒液雾化器控制模块32、消毒液雾化器接口端33和传感器信号模块38分别与单片机芯片模块电连接和/或通讯连接,传感器信号模块38用于采集传感器信号并为紫外线灯消毒控制模块和/或消毒液雾化器控制模块32提供传感器信号控制接入,AGV底盘40和主控制器30分别与消毒机器人前端及后台10通讯连接。单片机芯片模块36采用芯片型号为STC15W4K60S4的单片机U3。
紫外线灯消毒控制模块包括多路紫外线灯消毒控制电路,多路紫外线灯消毒控制电路包括多路~220V供电紫外线灯消毒控制电路和多路+12V供电紫外线灯消毒控制电路,每路紫外线灯消毒控制电路分别通过其设置的JD-OUT接口端与单片机芯片的第33功能引脚的P2.3/A11/MOSI_2引脚端、第32功能引脚的P2.2/A11/MOS0_2引脚端、第30功能引脚的P2.0/A8/RSTOUT_LOW引脚端、第28功能引脚的P4.3/SCLK_3引脚端电连接。具体的,第二路紫外线灯输出控制接口端JD-OUT2串联第53电阻R57后与第20NPN三极管Q20基极电连接,第20NPN三极管Q20集电极串联第56电阻R56后与第2继电器K2控制线圈一端电连接,第2继电器K2控制线圈另一端与+5V电源电连接,第2继电器K2控制线圈两端并联第17二极管D17,第17二极管D17阴极与+5V电源电连接,第17二极管D17阴极串联第55电阻后与第18发光二极管D18阳极电连接,第18发光二极管D18阴极与第17二极管D17阳极电连接,第2继电器K2常开触点分别与第二路~220V供电紫外线灯插接口端220_OUT2的两个引脚电连接;第二路紫外线灯输出控制接口端JD-OUT2与单片机芯片U3的第32功能引脚的P2.2/A10/MOSO-2引脚端电连接;第三路紫外线灯输出控制接口端JD-OUT3串联第53电阻R61后与第21NPN三极管Q21基极电连接,第21NPN三极管Q21集电极串联第60电阻R60后与第3继电器K3控制线圈一端电连接,第3继电器K3控制线圈另一端与+5V电源电连接,第3继电器K3控制线圈两端并联第19二极管D19,第19二极管D19阴极与+5V电源电连接,第19二极管D19阴极串联第59电阻后与第20发光二极管D20阳极电连接,第20发光二极管D20阴极与第19二极管D19阳极电连接,第3继电器K3常开触点分别与第一路~220V供电紫外线灯插接口端220_OUT3的两个引脚电连接,第一路紫外线灯输出控制接口端JD-OUT3与单片机芯片U3的第26功能引脚的P4.1/ MOSI-3引脚端电连接。后续类推。紫外线灯消毒控制模块设有与每路紫外线灯消毒控制电路相对应的紫外线灯保护盖驱动电机接口电路(见图4),每路紫外线灯保护盖驱动电机接口电路采用芯片型号为L9110H的马达驱动芯片,每个马达驱动芯片的A路输入管角和B路输入管角分别与单片机对应功能管角电连接。提高紫外线灯消毒平常状态下的人身安全防护性。具体的第一路紫外线灯保护盖驱动电机接口端L9110H_1的两个引脚端分别与型号为L9110H的第6马达驱动芯片U6的第1、第4功能引脚电连接,第6马达驱动芯片U6的IA功能引脚与单片机芯片U3的第24功能引脚P3.6/INT2/RXD_2/CCP1_2电连接, 第6马达驱动芯片U6的IB功能引脚与单片机芯片U3的第23功能引脚P3.5/T1/TOCLKO_2/CCP0_2电连接;第二路紫外线灯保护盖驱动电机接口端L9110H_2的两个引脚端分别与型号为L9110H的第7马达驱动芯片U7的第1、第4功能引脚电连接,第7马达驱动芯片U7的IA功能引脚与单片机芯片U3的第39功能引脚P4.6/RXD_2引脚端电连接,第7马达驱动芯片U7的IB功能引脚与单片机芯片U3的第38功能引脚P4.5/ALE/CCP5引脚端电连接;第三路紫外线灯保护盖驱动电机接口端L9110H_3的两个引脚端分别与型号为L9110H的第8马达驱动芯片U8的第1、第4功能引脚电连接,第8马达驱动芯片U8的IA功能引脚与单片机芯片U3的第37功能引脚P2.7/A15/ CCP1_3引脚端电连接, 第8马达驱动芯片U7的IB功能引脚与单片机芯片U3的第36功能引脚P2.6/A14/CCP1_3引脚端电连接;第四路紫外线灯保护盖驱动电机接口端L9110H_1的两个引脚端分别与型号为L9110H的第9马达驱动芯片U9的第1、第4功能引脚电连接,第9马达驱动芯片U9的IA功能引脚与单片机芯片U3的第35功能引脚P2.5/A13/CCP1_3引脚端电连接, 第9马达驱动芯片U9的IB功能引脚与单片机芯片U3的第34功能引脚P2.4/A12/ECI_3/SS_2引脚端电连接。通过分别改变端口P3.5、P3.6、P4.6、P4.5、P2.7、P2.6、P2.5、P2.4的高低电平,改变调整使电机驱动芯片L9110H输出12V驱动电压。
进一步具体的,多路紫外线灯消毒控制电路(见图5)采用二路~220V供电紫外线灯消毒控制电路和二路+12V供电紫外线灯消毒控制电路,其中第一路~220V供电紫外线灯消毒控制电路的JD-OUT1接口端与单片机芯片的第33功能引脚的P2.3/A11/MOSI_2引脚端电连接,JD-OUT1接口端串联第53电阻后串联接入第19NPN三极管基极,第19NPN三极管集电极串联第52电阻后与第1继电器线圈一端电连接,第1继电器线圈另一端与+5V电源电连接,第1继电器线圈两端并联第15二极管和第16发光二极管,其中第15二极管阴极与+5V电源电连接,第16发光二极管阳极与+5V电源电连接,第第15二极管阴极和第16发光二极管阳极之间串联第51电阻,第1继电器常开触点两端分别与第1紫外线灯接口端子电连接;第一路~220V供电紫外线灯消毒控制电路的JD-OUT11接口端与单片机芯片的第33功能引脚的P2.3/A11/MOSI_2引脚端电连接,JD-OUT11接口端串联第53电阻后串联接入第19NPN三极管基极,第19NPN三极管集电极串联第52电阻后与第1继电器线圈一端电连接,第1继电器线圈另一端与+5V电源电连接,第1继电器线圈两端并联第15二极管和第16发光二极管,其中第15二极管阴极与+5V电源电连接,第16发光二极管阳极与+5V电源电连接,第第15二极管阴极和第16发光二极管阳极之间串联第51电阻,第1继电器常开触点两端分别与第1紫外线灯接口端子电连接;第二路~220V供电紫外线灯消毒控制电路的JD-OUT2接口端与单片机芯片的第31功能引脚的P2.1/A10/MOS0_2引脚端电连接,JD-OUT2接口端串联第57电阻后串联接入第20NPN三极管基极,第20NPN三极管集电极串联第56电阻后与第2继电器线圈一端电连接,第2继电器线圈另一端与+5V电源电连接,第2继电器线圈两端并联第17二极管和第18发光二极管,其中第17二极管阴极与+5V电源电连接,第18发光二极管阳极与+5V电源电连接,第第17二极管阴极和第18发光二极管阳极之间串联第55电阻,第2继电器常开触点两端分别与第2紫外线灯接口端子电连接;第三路~220V供电紫外线灯消毒控制电路的JD-OUT3接口端与单片机芯片的第30功能引脚的P2.0/A18/RSTOUT_LOW引脚端电连接,JD-OUT4接口端串联第65电阻后串联接入第22NPN三极管基极,第22NPN三极管集电极串联第64电阻后与第4继电器线圈一端电连接,第4继电器线圈另一端与+5V电源电连接,第1继电器线圈两端并联第21二极管和第22发光二极管,其中第21二极管阴极与+5V电源电连接,第22发光二极管阳极与+5V电源电连接,第21二极管阴极和第22发光二极管阳极之间串联第63电阻,第4继电器常开触点两端分别与第4紫外线灯接口端子电连接;第五路~220V供电紫外线灯消毒控制电路的JD-OUT5接口端与单片机芯片的第28功能引脚的P4.3/SCLK_3引脚端电连接,JD-OUT5接口端串联第69电阻后串联接入第23NPN三极管基极,第23NPN三极管集电极串联第68电阻后与第5继电器线圈一端电连接,第5继电器线圈另一端与+5V电源电连接,第5继电器线圈两端并联第23二极管和第24发光二极管,其中第23二极管阴极与+5V电源电连接,第24发光二极管阳极与+5V电源电连接,第23二极管阴极和第24发光二极管阳极之间串联第67电阻,第5继电器常开触点两端分别与第5紫外线灯接口端子电连接。二路+12V供电紫外线灯消毒控制电路中的第一路+12V供电紫外线灯消毒控制电路的JD-OUT3接口端与单片机芯片的第30功能引脚的P2.0/A18/RSTOUT_LOW引脚端电连接,JD-OUT5接口端串联第61电阻后串联接入第21NPN三极管基极,第21NPN三极管集电极串联第60电阻后与第3继电器线圈一端电连接,第3继电器线圈另一端与+5V电源电连接,第3继电器线圈两端并联第19二极管,第19二极管D19阴极与+5V电源电连接,第19二极管D19阴极串联第59电阻后与第20发光二极管D20阳极电连接,第20发光二极管D20阴极与第19二极管D19阳极电连接,第3继电器K3常开触点分别与第一路+12V供电紫外线灯插接口端12_2的引脚电连接。二路+12V供电紫外线灯消毒控制电路中的第二路+12V供电紫外线灯消毒控制电路的JD-OUT4接口端与单片机芯片的第30功能引脚的P2.0/A18/RSTOUT_LOW引脚端电连接,JD-OUT5接口端串联第65电阻后串联接入第22NPN三极管基极,第22NPN三极管集电极串联第64电阻后与第4继电器线圈一端电连接,第4继电器线圈另一端与+5V电源电连接,第4继电器线圈两端并联第21二极管,第21二极管D21阴极与+5V电源电连接,第21二极管D21阴极串联第63电阻后与第22发光二极管D22阳极电连接,第22发光二极管D22阴极与第21二极管D21阳极电连接,第4继电器K4常开触点分别与第二路+12V供电紫外线灯插接口端12_1的引脚电连接。
消毒液雾化器控制模块(见图7)包括消毒液雾化器接口端和雾化器开关电路及雾量调节电路,消毒液雾化器接口端包括雾化器电源输入端和雾化器电源输出端,雾化器开关电路及雾量调节电路通过其设置的PWM4端口与单片机芯片模块的单片机U3第29功能引脚的P4.4/RD/CCP4引脚电连接,雾化器电源输入端的电源端串联第5二极管Q5阴极,第5二极管阳极与第四N沟道MOS管Q4漏极电连接,雾化器电源输出端的+P端引脚串联第5二极管D5阴极,雾化器电源输出端的H-WZ端引脚并联第5二极管阳极,同时雾化器电源输出端的H-WZ端引脚串联RC串联电路后与第四N沟道MOS管源极并联,RC串联电路采用第12电阻和第10电容串联构成,第四N沟道MOS管源极与电源地电连接;第四N沟道MOS管栅极与雾化占空比调节电路电连接,雾化占空比调节电路前级电连接至PWM4端口;雾化器电源输出端用于与设于消毒机器人内部的雾化器接口连接;雾化占空比调节电路包括第3NPN三极管Q3、第1PNP三基管Q1和第2PNP三极管Q2,PWM4端口串联第7电阻R7后与第3NPN三极管基极电连接,第3三极管集电极串联第8电阻R8后与第1PNP三基管基极电连接,第1PNP三基管集电极与第2PNP三极管基极电连接,第2PNP三极管基极和集电极上并联第10电阻R10,第2PNP三极发射极串联第10电阻后与第四N沟道MOS管栅极电连接,第1PNP三基管集电极串联第6二极管D6阳极,第6二极管阴极与第四N沟道MOS管栅极电连接,第3NPN三极管基极串联第9电阻后与第1NPN三极管发射极一起与+12V电源电连接,第3三极管发射极和第2PNP三极管集电极均与电源地电连接。另外在主控制器板301上安装连接设有抵水位传感器接口端34和高水位传感器接口端35,以更好监控消毒液雾化消毒处理时的消毒液水位高低液面监控,以便更好的进行发出及时自动加水位置信息返回信号处理。通过改变PWM4端口的占空比改变第四N沟道MOS管STP75NF75的占空比来达到开关雾化器和改变雾化器雾量大小的功能。
雾化气动控制模块(见图8)包括雾化气动装置电源输出接口端和气动开关调节电路,气动开关调节电路通过其设置的PWM3端口端与单片机芯片模块的单片机U3第27功能引脚的P4.2/WR/CCP3引脚电连接,气动装置电源输出接口端的+P端引脚串联第4二极管D4阴极同时与电源+12V电连接,气动装置电源输出接口端的H-WZ端引脚与第六N沟道MOS管Q6漏极电连接,同时气动装置电源输出接口端的H-WZ端引脚串联RC串联电路后与第六N沟道MOS管源极电连接,第六N沟道MOS管源极与电源地电连接,第六N沟道MOS管栅极与气动占空比调节电路电连接,气动占空比调节电路前级电连接至PWM3端口,气动装置电源输出接口端用于与设于消毒机器人内部的气动开关装置接口连接;气动占空比调节电路包括第4NPN三极管Q4、第2PNP三基管Q2和第8PNP三极管Q8,PWM3端口串联第7电阻R7后与第4NPN三极管基极电连接,第4三极管集电极串联第5电阻R5后与第2PNP三基管基极电连接,第2PNP三基管集电极与第8PNP三极管基极电连接,第8PNP三极管基极和集电极上并联第17电阻R17,第8PNP三极发射极串联第11电阻R11后与第六N沟道MOS管栅极电连接,第2PNP三基管集电极串联第6二极管D6阳极,第6二极管阴极与第六N沟道MOS管栅极电连接,第4NPN三极管基极串联第3电阻后与第2NPN三极管发射极一起与+12V电源电连接,第4三极管发射极和第8PNP三极管集电极均与电源地电连接。通过改变PWM3端口的占空比改变第六N沟道MOS管STP75NF75的占空比来达到开关气动装置和改变气动装置风速大小的功能。
AGV底盘40和主控制器30分别与消毒机器人前端及后台采用485通讯连接,通过MAX485芯片通讯模块与后台数据通讯连接,其中主控制器上设有后台数据传输接口端子485_1和环境数据采集接口端子485_2 (见图9),数据传输接口端子分别通过USART4_RX端口和USART4_TX端口分别与单片机芯片模块的单片机第43功能引脚的P0.2/AD2/RXD4引脚和第44功能引脚的P0.3/AD3/TXD4电连接,环境数据采集接口端子分别通过USART2_RX端口和USART2_TX端口分别单片机芯片模块的单片机第4功能引脚的P1.0/ADC0/CCP1/RXD2引脚和第5功能引脚的P1.1/ADC1/CCP0/TXD2电连接。当然485_2接口端子也可以是作为预留接口,为备用通讯接口预留。
传感器信号模块(见图6)包括信号输入接口端和传感器电平信号控制电路,信号输入接口端采用3P接口端结构的六个信号输入接口端(见图6中S1、S2、S3、S4、S5、S6),每个信号输入接口端括+24v电源接口端子、传感器接口端子和电源地接口端子,六个信号输入接口端中的四个用于采集紫外线灯保护盖到位的传感器信号输入接口,另一个用于采集升降杆降到位的传感器信号输入接口,消毒液雾化器控制模块在停止喷雾后,消毒液雾化器控制模块执行控制升降杆的下降动作并检测降到位传感器信号;其中第一传感器、第二传感器、第三传感器、第四传感器和第五传感器信号输入端分别与各自对应的光电耦合器输入端的发光二极管阴极输入端电连接,再从光电耦合器输出端的光敏三极管集电极输出端电连接至机械臂转接控制板中设置的MCU处理芯片上的传感器反馈输入接口端;进一步具体的,第一传感器输入端sensor1与光电耦合器输入端的发光二极管阴极输入端电连接,再从光电耦合器输出端的光敏三极管集电极输出端电连接至单片机处理芯片上的第一传感器反馈输入接口端P1.5,第一传感器反馈输入接口端P1.5串联第92电阻R92后与+5V电源电连接,第一传感器反馈输入接口端P1.5依次串联第116电阻R116和第45发光二极管阳极后,第45发光二极管阴极与电源地电连接;其他采集紫外线灯保护盖到位的传感器信号输入接口电路和升降杆降到位的传感器信号输入接口参照图9类推。图9中各传感器中ENSOR1、SENSOR2、SENSOR3、SENSOR4是紫外灯保护盖到位传感器接口,当紫外灯保护盖到开到位后,会产生一个低电平信号,导通光耦Q29、Q30、Q15、Q16,此时P5.4、P5.5、P4.0、P3.2会收到一个低电平信号,表示保护盖已到位,并立即停止电机。SENSOR5为升降杆到位传感器接口,当升降杆降到位后,会产生一个低电平信号,导通光耦Q17,此时P3.3会收到一个低电平信号,表示升降杆已降到位,并立即停止升降杆下降。
实施例2:
图1、图2、图3、图4、图5、图6、图7、图8、图9所示的实施例中,一种智能消毒机器人消毒主控器的消毒控制方法,包括消毒控制执行步骤
A1.根据消毒任务执行需求,选择采用紫外线灯单独消毒、消毒液喷雾单独升降消毒、紫外线灯消毒和消毒液升降消毒组合消毒方式中的一种消毒处理方式;
A2.后台根据选定的一种消毒处理方式,发送消毒执行命令任务给消毒机器人前端;
A3.消毒机器人前端收到消毒执行命令任务时,首先下达执行命令给AGV底盘,使AGV底盘到达正常的预设工作点位,并在预设的点位间移动;
A4. AGV底盘到达正常工作点位后,并在预设的点位间移动同时,消毒机器人前端发送执行命令任务给实施例1技术方案所述的智能消毒机器人消毒主控器,主控器接收到执行命令任务之后开始自动运行消毒执行任务,开始执行紫外线灯消毒和/或抬高升降杆输出防疫消毒喷雾;
A5. 主控器在执行消毒喷雾任务的工作过程中,实时采集环境数据紫外线灯状态、环境数据信息和/或消毒液位数据信息,并上传紫外线灯状态、环境数据和/或消毒液位状态信息反馈返回给消毒机器人前端和/或后台;
上述第A4执行步骤中,主控制器在执行紫外线灯消毒和/或抬高升降杆输出防疫消毒喷雾同时,根据实际执行任务情况同步执行工作状态指示、雾量液位控制和/或环境数据采集任务;
上述第A4执行步骤中,在执行具有抬高升降杆输出防疫消毒喷雾02的消毒命令处理时,升降杆抬升到喷雾头升降04到设定喷雾高度时,消毒液雾化器控制模块控制开始雾化喷雾消毒处理,在消毒液消毒处理完后,停止消毒液的喷雾消毒处理,升降杆降低回归至初始高度位置;在喷雾消毒处理过程中也通过消毒机器人前端人机交互界面对主控制器设定的雾量06参数执行雾量液位控制03,以达到更好喷出满足不同情况下消毒处理的雾量控制需求。
上述第A4执行步骤中,在执行具有紫外线灯消毒命令处理时,紫外线灯消毒控制模块控制每路紫外线灯保护盖驱动电机接口电路控制紫外灯保护开关05打开紫外线灯保护盖,多路~220V供电紫外线灯消毒控制电路和/或多路+12V供电紫外线灯消毒控制电路开始控制紫外灯开关01打开紫外线消毒灯开始消毒,而在平常不执行紫外线灯消毒命令时,紫外线消毒灯隐藏在机器人体内;
在执行消毒任务前,根据实际情况或消毒需求情况,在消毒机器人前端的人机交互界面上设置主控制器的消毒任务过程中消毒雾化器的雾量06及风速07控制的参数设置。
在本发明位置关系描述中,出现诸如术语“内”、“外”、“上”、“下”、“左”、“右”等指示方位或者位置关系的为基于附图所示的方位或位置关系,仅是为了方便描述实施例和简化描述,而不是指示或暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
以上内容和结构描述了本发明产品的基本原理、主要特征和本发明的优点,本行业的技术人员应该了解。上述实例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都属于要求保护的本发明范围之内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 智能消毒机器人消毒主控器及其消毒控制方法
- 一种便携式智能消毒机器人的消毒路径控制方法及芯片