一种机器人关节电机参数辨识与控制参数自整定方法
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及电机控制领域,尤其涉及一种机器人关节电机参数辨识与控制参数自整定方法。
背景技术
在工业生产、生活服务、医疗、航空航天等相关领域,机器人扮演着越来越重要的角色。机器人关节所用伺服电机永磁同步电机的控制性能,对机器人运动控制起着至关重要的作用。永磁同步电机在工作过程中,随着工作时间增加温度升高,电机定子电阻、转子磁链参数均会发生变化,电机定子电感与转子磁链还会受磁路饱和的影响,为了获得更优异的控制性能,需要准确的辨识电机参数,从而实现电机控制参数的在线自整定以达到更优的控制性能。
目前主要的辨识算法包括最小二乘法及其推导算法、模型参考自适应方法、扩展卡尔曼滤波方法和智能算法。最小二乘法辨识过程简单且收敛速度较快,但辨识精度受噪声干扰及转速波动影响。模型参数自适应法具有算法简单和易于实现的优点,但其收敛速度及精度受初值影响较大。扩展卡尔曼滤波要进行大量矩阵和矢量运算,辨识参数较多时计算非常复杂。智能算法存在前期需要数据量大、计算复杂度很大和对硬件的要求很高等问题。
发明内容
本发明针对现有技术不足,公开了一种机器人关节电机参数辨识与控制参数自整定方法。
为实现上述技术目的,本发明采用了以下技术方案:一种机器人关节电机参数辨识与控制参数自整定方法,包括如下步骤:
(1)基于矢量控制方法,采用多环路PID伺服控制方法,控制机器人关节电机运动,采集采集关节电机d轴电压u
(2)建立永磁同步电机数学模型,利用基于遗忘因子的递推最小二乘算法辨识关节电机的定子电阻R
(3)将步骤(2)辨识出的定子电阻R
(4)基于步骤(3)进一步准确辨识的定子电阻
进一步地,所述步骤(2)包括以下子步骤:
(2.1)建立永磁同步电机数学模型,公式如下:
其中,u
(2.2)基于步骤(2.1)构建的永磁同步电机数学模型,提取需要辨识的定子电阻R
其中,d-q轴电感L
(2.3)采用i
采用基于遗忘因子的最小二乘算法进行辨识:
其中,θ(k)为待辨识参数,Y(k)为输出参数,
其中:
y=ω
进一步地,所述步骤(3)包括以下子步骤:
(3.1)构建模型参考自适应辨识模型,公式如下:
式中
所以可调模型可以表示为:
(3.2)将步骤(2)基于遗忘因子最小二乘算法辨识得到的定子电阻R
定义
其中,定子电阻R
进一步地,所述步骤(4)具体为通过通过步骤(3)辨识出的定子电阻
同现有技术相比,本发明的技术方案具有以下优点:本发明的所述方法,能够快速辨识电机参数,辨识精度较高,并且能够实现电机控制参数的在线自整定,简易可行,成本低,可广泛用于机器人关节电机控制。
附图说明
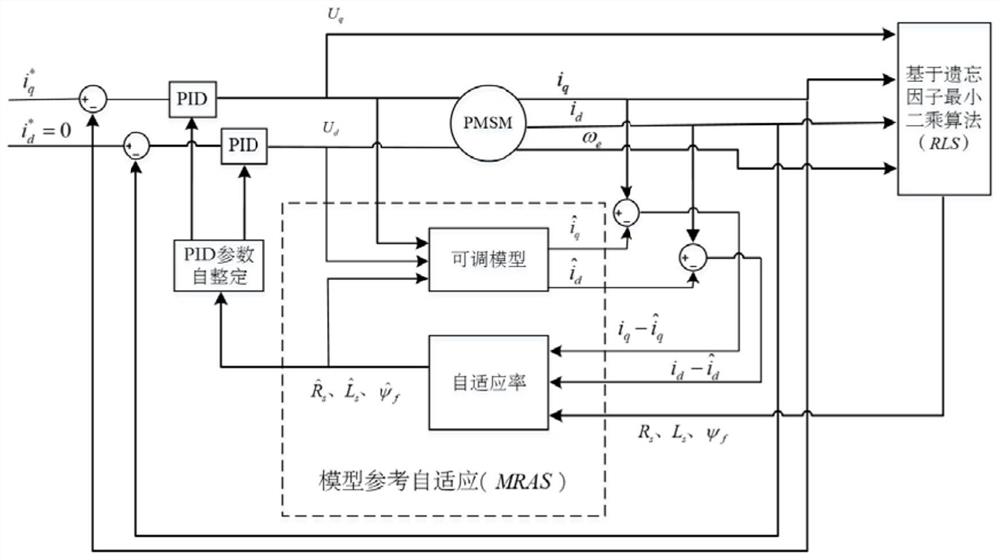
图1是本发明方法的流程框图;
图2是基于遗忘因子的最小二乘算法(RLS)辨识关节电机参数图;
图3是基于遗忘因子的最小二乘算法(RLS)与模型参考自适应算法(MRAS)联合辨识关节电机参数图;
图4是关节电机电流环控制参数自整定前后的时间-电流响应图。
具体实施方式
本发明利用基于遗忘因子的最小二乘算法快速辨识电机参数作为模型参考自适应算法初值进一步准确辨识电机参数,并且根据辨识参数在线自整定电机控制电流环PID参数,能够达到较好的控制效果。
如图1所示,本发明实施方式的流程图,具有如下步骤:
步骤(1)采用多环路PID伺服控制方法及电机矢量控制算法,控制机器人关节电机运动,采集关节电机的d轴电压u
步骤(2)利用基于遗忘因子的递推最小二乘算法辨识关节电机电阻、电感及磁链;具体包括如下步骤:
(2.1)建立永磁同步电机数学模型:
其中,u
(2.2)基于步骤(2.1)构建的永磁同步电机数学模型,计算得到所需要辨识的定子电阻R
所述机器人关节电机d-q轴电感相等有L
(2.3)采用i
进而采用基于遗忘因子的最小二乘算法进行辨识:
其中,θ(k)为待辨识参数,Y(k)为输出参数,
其中:
Y=ω
基于遗忘因子的最小二乘算法(RLS)辨识关节电机参数图如图2所示,RLS算法开始能较快辨识出电机电阻、电感及磁链参数,在0.6s改变电机磁链参数后,算法辨识收敛精度不够高。
步骤(3)将步骤(2)基于遗忘因子最小二乘算法辨识得到的关节电机参数作为初始值输入模型参考自适应辨识模型,进一步准确辨识关节电机电阻、电感及磁链参数;
(3.1)构建模型参考自适应辨识模型,公式如下:
式中
所以可调模型可以表示为:
(3.2)将步骤(2)基于遗忘因子最小二乘算法辨识得到的定子电阻R
定义
其中,定子电阻R
基于遗忘因子的最小二乘算法(RLS)与模型参考自适应算法(MRAS)联合辨识关节电机参数图如图3所示,能够快速辨识电机电阻、电感及磁链参数,并且在0.6s时刻电机磁链参数改变后,相比图2所示方法,图3方法能快速辨识改变后的电机参数并且稳态辨识精度较高。
步骤(4)通过步骤(3)辨识出的定子电阻
PID控制器传递函数为:
其中
电机输出电流I和输入电压V之间的传递函数为:
根据控制理论中控制器设计原则,PID控制器的零点能够消除电机传递函数的极点可推出:
采用零极点对消后,系统的开环传递函数变为:
转折频率
通过在线辨识电机参数实现PID控制参数自整定,最后达到提高机器人关节电机电流控制性能提升的目的。
关节电机电流环控制参数自整定前后的时间-电流响应对比图如图4所示,其中曲线1为关节电机电流环控制参数自整定后的时间-电流响应图,曲线2为关节电机电流环控制参数自整定后的时间-电流响应图。控制参数自整定后,电流响应更快,电流环PID参数能够根据电机辨识参数实时调整,自整定最佳参数达到加快电流响应时间的目的。
综上,本发明所述的机器人关节电机参数辨识与控制参数自整定方法,能够快速辨识电机参数,辨识精度较高,并且能够实现电机控制参数的在线自整定,简易可行,成本低,可广泛用于机器人关节电机控制。
以上应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
- 一种机器人关节电机参数辨识与控制参数自整定方法
- 一种机器人关节伺服电机柔顺控制方法