基于FPGA流水设计的多通道单目标联合检测跟踪方法
文献发布时间:2023-06-19 19:16:40
技术领域
本申请涉及雷达检测技术领域,特别是涉及一种基于FPGA流水设计的多通道单目标联合检测跟踪方法。
背景技术
隐身目标的雷达截面积呈数量级下降,对现有末制导雷达系统提出了巨大挑战,为了提高对隐身目标的截获概率和参数估计精度,迫切需要改善现有或新研究雷达的检测性能,因此低信噪比条件下的目标检测和参数估计成为重要研究方向。
在传统单目标跟踪检测系统中,目标跟踪与检测独立进行,采用先检测后跟踪方法,主要原理为:首先基于一定的门限准则进行目标判决,再根据判决结果决定跟踪操作,最后进行目标参数估计,适合高信噪比。针对在信噪比极低的情况下,检测过程所带来的信息损失导致性能较差。
此外,实现单目标联合检测跟踪处理,涉及指数、对数、矩阵等复杂运算,传统方案中采用DSP(数字信号处理,Digital Signal Processing)或ARM(处理器)实现,这种方案对于粒子数量不多且实时性要求不高的系统来说,是一种易于编程实现的简单方法。但对于高重频雷达,处理时间要求为微秒级,而高精度参数估计系统要求粒子数量高达上千个,采用多核DSP架构难以满足该处理时间要求。
发明内容
基于此,有必要针对上述技术问题,提供一种能够适用于高重频PD(pulseDoppler,脉冲多普勒)雷达在复杂背景下的弱小单目标检测跟踪,提高数据处理实时性能的基于FPGA流水设计的多通道单目标联合检测跟踪方法。
一种基于FPGA流水设计的多通道单目标联合检测跟踪方法,所述方法包括:
采用三路高斯随机数发生器并行生成三路高斯分布随机数,根据三路高斯分布随机数生成初始粒子系统;其中,初始粒子系统包括多普勒频率粒子、失调角度粒子和信噪比粒子以及各个粒子对应的粒子权重;
获取雷达当前帧观测的多通道频谱数据并进行噪声归一化处理,得到噪声归一化后的频谱数据,根据噪声归一化后的频谱数据中的观测值和初始粒子系统中的粒子值进行计算,得到各个粒子的权重向量;
根据各个粒子的权重向量对粒子权重进行更新并进行归一化处理,得到更新后的权重;
根据各个粒子更新后的权重对粒子进行重采样,得到重采样后的粒子,根据重采样后的粒子进行参数估计和粒子更新,得到粒子滤波结果和预测粒子,根据预测粒子对下一帧的频谱数据进行目标检测跟踪直至获取所有频谱数据的粒子滤波结果,完成所有频谱数据的目标检测跟踪。
在其中一个实施例中,所述方法应用在FPGA中并采用串并行流水化处理方式,对重采样前的粒子X1和重采样后的粒子X2进行串行处理,对X1与X2内各自的粒子进行并行处理。
在其中一个实施例中,所述方法中的帧间粒子数据存储在FPGA的专用存储单元中,帧内过程数据存储在FPGA的共享存储单元中。
在其中一个实施例中,三路高斯随机数发生器包括线性移位反馈寄存器、相位发生器、幅度查询表和IP核乘法器;
采用三路高斯随机数发生器并行生成三路高斯分布随机数,根据三路高斯分布随机数生成初始粒子系统,包括:
采用预设固定参数的线性移位反馈寄存器生成两路均匀分布随机数,根据Box-Muller算法分别将第一路均匀分布随机数输入相位发生器进行处理,得到第一路均匀分布随机数对应的相位值,将第二路均匀分布随机数输入幅度查询表进行查询,得到第二路均匀分布随机数对应的幅度值;
将相位值和幅度值输入FPGA中的第一路IP核乘法器和第二路IP核乘法器进行相乘,分别得到第一路高斯分布随机数和第二路高斯分布随机数,将第一路高斯分布随机数和第二路高斯分布随机数输入第三路IP核乘法器进行相乘,得到第三路高斯分布随机数;
根据第三路高斯分布随机数生成高斯分布的初始粒子系统{x
在其中一个实施例中,获取雷达当前帧观测的多通道频谱数据并进行噪声归一化处理,得到噪声归一化后的频谱数据,包括:
获取雷达目标检测当前帧的和通道频谱数据与差通道频谱数据,根据和通道的噪声功率对频谱数据进行噪声归一化处理,得到噪声归一化后的频谱数据,表示为
在其中一个实施例中,根据噪声归一化后的频谱数据中的观测值和初始粒子系统中的粒子值进行计算,得到各个粒子的权重向量,包括:
对初始粒子系统中的多普勒频率粒子,判断多普勒频率粒子是否满足预设的多普勒频率范围要求,当判断满足要求时,根据噪声归一化后的频谱数据中的多普勒频率粒子观测值和初始粒子系统中的多普勒频率粒子值进行计算,得到多普勒频率粒子的权重向量;否则,舍弃多普勒频率粒子观测值,根据多普勒频率粒子值进行计算,得到多普勒频率粒子的权重向量;
对初始粒子系统中的失调角度粒子和信噪比粒子,根据噪声归一化后的频谱数据中的粒子观测值和初始粒子系统中的对应粒子值进行计算,得到失调角度粒子和信噪比粒子对应的权重向量;
其中,初始粒子系统中各个粒子的权重向量表示为
Ln=ss′*Cov_ss
式中,ss表示粒子观测值与初始系统中对应粒子值的差,ss′表示ss的转置,Cov_ss表示粒子协方差矩阵,Cov_ss
在其中一个实施例中,根据各个粒子的权重向量对粒子权重进行更新并进行归一化处理,得到更新后的权重,包括:
根据各个粒子的权重向量对粒子权重进行更新,得到新权重,表示为
对新权重进行归一化处理,得到各个粒子更新后的权重,表示为
在其中一个实施例中,权重向量和更新后的权重的计算过程中,采用定点数和浮点数混合运算的数据处理方式。
在其中一个实施例中,权重向量和更新后的权重的计算过程中,采用定点数和浮点数混合运算的数据处理方式,包括:
在权重向量的计算过程中,将权重向量的指数表达式Ln=Exp(a+b)中的整数b输入ROM存储器进行查表,得到整数计算结果,将权重向量指数表达式中的小数a输入CordicIP核进行动态计算,得到小数计算结果,将整数计算结果和小数计算结果依次输入IP核乘法器和IP核进行处理,输出权重向量;
在更新后的权重的计算过程中,将当前帧的粒子权重输入IP核进行定点数转浮点数处理,得到转换后的粒子权重,将转换后的粒子权重和权重向量输入IP核乘法器进行相乘,并将得到的各个粒子的新权重存储在RAM存储器中,从RAM存储器中获取所有粒子的新权重并对各个粒子的新权重进行归一化处理,并将得到的归一化后的权重输入IP核进行浮点数转定点数处理,输出各个粒子更新后的权重。
在其中一个实施例中,根据重采样后的粒子进行参数估计和粒子更新,得到粒子滤波结果和预测粒子,包括:
根据预设阈值对重采样后的粒子进行筛选,当重采样后的粒子对应的粒子值不等于预设阈值时,判定重采样后的粒子为无效粒子;否则,判定重采样后的粒子为有效粒子,对有效粒子进行参数估计,得到粒子滤波结果,表示为
根据重采样后的粒子中的当前帧粒子
上述基于FPGA流水设计的多通道单目标联合检测跟踪方法,首先采用三路高斯随机数发生器并行生成三路高斯分布随机数,并根据三路高斯分布随机数生成初始粒子系统;然后获取雷达当前帧观测的多通道频谱数据并进行噪声归一化处理,得到噪声归一化后的频谱数据,并根据噪声归一化后的频谱数据中的观测值和初始粒子系统中的粒子值进行计算,得到各个粒子的权重向量;再根据各个粒子的权重向量对粒子权重进行更新并进行归一化处理,得到更新后的权重;最后根据各个粒子更新后的权重对粒子进行重采样,得到重采样后的粒子,并根据重采样后的粒子进行参数估计和粒子更新,得到粒子滤波结果和预测粒子,根据预测粒子对下一帧的频谱数据进行目标检测跟踪直至获取所有频谱数据的粒子滤波结果,完成所有频谱数据的目标检测跟踪。采用本方法能够充分利用观测数据中的有效信息,在低信噪比条件下,大大地提高了目标跟踪检测性能与参数估计精度,同时本方法采用高速流水化设计的FPGA实现,保证了数据处理实时性要求。
附图说明
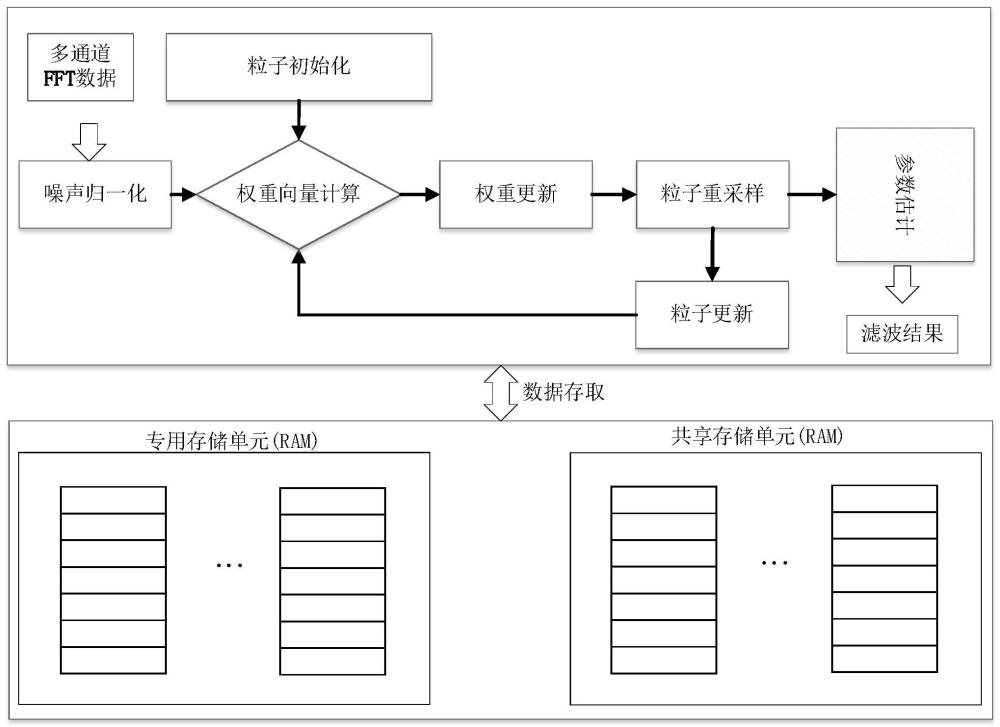
图1为一个实施例中基于FPGA流水设计的多通道单目标联合检测跟踪方法的流程示意图;
图2为一个实施例中在FPGA中并采用串并行流水化处理步骤的流程示意图;
图3为一个实施例中三路高斯分布随机数生成方法的流程示意图;
图4为一个实施例中权重向量和更新后的权重的计算过程示意图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
在一个实施例中,如图1所示,提供了一种基于FPGA流水设计的多通道单目标联合检测跟踪方法,包括以下步骤:
步骤S1,粒子初始化:采用三路高斯随机数发生器并行生成三路高斯分布随机数,根据三路高斯分布随机数生成初始粒子系统;其中,初始粒子系统包括多普勒频率粒子、失调角度粒子和信噪比粒子以及各个粒子对应的粒子权重。其中,生成的初始粒子存储在存储单元(RAM)中。
可以理解,本申请的目标检测跟踪方法是基于粒子滤波算法,将高重频PD模式下目标信号的参数视作为粒子的状态矢量,将雷达和差通道的数据输入作为观测值,采用最优贝叶斯滤波器实现目标联合检测和估计。
步骤S2,噪声归一化:获取雷达当前帧观测的多通道频谱数据并进行噪声归一化处理,得到噪声归一化后的频谱数据。
可以理解,雷达观测的多通道傅里叶(FFT)频谱数据还需要进行噪声归一化处理才可以用于粒子权重的计算,且噪声归一化处理每帧数据执行一次。
步骤S3,权重向量计算:根据噪声归一化后的频谱数据中的观测值和初始粒子系统中的粒子值进行计算,得到各个粒子的权重向量。
步骤S4,权重更新:根据各个粒子的权重向量对粒子权重进行更新并进行归一化处理,得到更新后的权重。其中,更新后的权重存储在RAM中。
可以理解,为了提高估计精度和兼顾资源开销,在权重向量和权重更新的数据计算过程中,采用“定点数+浮点数”混合的数据处理方式,其中,定点数转浮点数调用FPGA(可编程阵列逻辑)中的Floating-point IP(浮点IP)核。对于权重向量指数计算,对指数的整数与小数分别独立计算,即整数采用查找表来完成,小数采用FPGA中的Cordic IP(坐标旋转数字计算IP)核进行动态计算,有效提高了权重计算精度,并兼顾了FPGA逻辑单元资源。
步骤S5,粒子重采样:根据各个粒子更新后的权重对粒子进行重采样,得到重采样后的粒子。
可以理解,根据系统重采样方法以实现复制、保留大权值粒子,舍弃小权值粒子,即从RAM中读取权重值进行累加,当权重累加值大于随机采样的参考值,则复制、保留该粒子,否则,舍弃该粒子。输出重采样后的粒子主要用于参数估计和粒子更新,且重采样后的所有粒子等权重。
步骤S6,参数估计:根据重采样后的粒子进行参数估计,得到粒子滤波结果。
可以理解,由于重采样后的粒子值更接近后验密度,参数估计是指根据重采样后的粒子进行目标存在概率和目标回波测量信息(包括多普勒频率、失调角和信噪比等参数)估计。
步骤S7,粒子更新:根据重采样后的粒子进行粒子更新,得到预测粒子。其中预测粒子存储在RAM中。
步骤S8,循环执行步骤S2~步骤S7,根据预测粒子对下一帧的频谱数据进行目标检测跟踪直至获取所有频谱数据的粒子滤波结果,完成所有频谱数据的目标检测跟踪。
上述一种基于FPGA流水设计的多通道单目标联合检测跟踪方法,通过在高速FPGA中进行粒子初始化、噪声归一化、权重向量计算、权重更新、粒子重采样、参数估计和粒子更新等步骤,充分利用观测数据中的有效信息,在低信噪比条件下,大大地提高目标跟踪检测性能与参数估计精度,同时采用高速FPGA实现,保证了数据处理实时性要求。
在其中一个实施例中,如图2所示,上述基于FPGA流水设计的多通道单目标联合检测跟踪方法应用在FPGA中并采用串并行流水化处理方式,对重采样前的粒子X1和重采样后的粒子X2进行串行处理,对X1与X2内各自的粒子进行并行处理。并且,在对重采样前的粒子X1进行处理时,相邻处理时间间隔1个粒子。
可以理解,采用串并行流水化处理方式即是对粒子存取采用“乒乓操作”的2级缓冲请求流水结构,可以减少粒子请求的流水线停顿气泡,提高处理效率,减少数据等待时间,大大减少了单目标跟踪检测的时间。
在其中一个实施例中,如图1所示,上述基于FPGA流水设计的多通道单目标联合检测跟踪方法中的帧间粒子数据存储在FPGA的专用存储单元中,帧内过程数据存储在FPGA的共享存储单元中。通过对数据RAM进行分类设计,有效降低了FPGA的资源开销。
在其中一个实施例中,三路高斯分布随机数生成方法示如图3所示,其中,三路高斯随机数发生器包括线性移位反馈寄存器、相位发生器、幅度查询表和IP核乘法器,通过三路高斯随机数发生器能并行快速产生三路近似高斯分布随机数,具体步骤为:
首先采用预设固定参数的线性移位反馈寄存器生成两路均匀分布随机数,根据Box-Muller(博克斯-穆勒变换)算法分别将第一路均匀分布随机数输入基于DDS(直接数字式频率合成器算法)的相位发生器进行处理,得到第一路均匀分布随机数对应的相位值,将第二路均匀分布随机数输入基于ROM(只读存储器)的幅度查询表进行查询,得到第二路均匀分布随机数对应的幅度值;
然后将相位值和幅度值输入FPGA中的第一路IP核乘法器和第二路IP核乘法器进行相乘,分别得到第一路高斯分布随机数G1和第二路高斯分布随机数G2,将第一路高斯分布随机数G1和第二路高斯分布随机数G2输入第三路IP核乘法器进行相乘,得到第三路高斯分布随机数G3。
进一步地,根据第三路高斯分布随机数G3生成高斯分布的初始粒子系统{x
在其中一个实施例中,获取雷达当前帧观测的多通道频谱数据并进行噪声归一化处理,得到噪声归一化后的频谱数据,包括:
获取雷达目标检测当前帧的和通道频谱数据与差通道频谱数据,根据和通道的噪声功率对频谱数据进行噪声归一化处理,得到噪声归一化后的频谱数据,表示为
在其中一个实施例中,根据噪声归一化后的频谱数据中的观测值和初始粒子系统中的粒子值进行计算,得到各个粒子的权重向量,包括:
对初始粒子系统中的多普勒频率粒子,首先判断多普勒频率粒子是否满足预设的多普勒频率范围要求,当判断满足要求时,根据噪声归一化后的频谱数据中的多普勒频率粒子观测值和初始粒子系统中的多普勒频率粒子值进行计算,得到多普勒频率粒子的权重向量;否则,舍弃多普勒频率粒子观测值,根据多普勒频率粒子值进行计算,得到多普勒频率粒子的权重向量;具体地,用户预设的多普勒频率范围要求为[-20kHz,20kHz];
对初始粒子系统中的失调角度粒子和信噪比粒子,根据噪声归一化后的频谱数据中的粒子观测值和初始粒子系统中的对应粒子值进行计算,得到失调角度粒子和信噪比粒子对应的权重向量;
其中,初始粒子系统中各个粒子的权重向量表示为
Ln=ss′*Cov_ss
式中,ss表示粒子观测值与初始系统中对应粒子值的差,ss′表示ss的转置,Cov_ss表示粒子协方差矩阵,Cov_ss
在其中一个实施例中,根据各个粒子的权重向量对粒子权重进行更新并进行归一化处理,得到更新后的权重,包括:
根据各个粒子的权重向量对粒子权重进行更新,得到新权重,表示为
对新权重进行归一化处理,得到各个粒子更新后的权重,表示为
为了提高权重计算精度并兼顾资源开销,进一步地,如图4所示,在权重向量和更新后的权重的计算过程中,采用定点数和浮点数混合运算的数据处理方式,具体步骤为:
在权重向量的计算过程中,将权重向量的指数表达式Ln=Exp(a+b)中的整数b输入ROM存储器进行查表,得到整数计算结果,将权重向量指数表达式中的小数a输入CordicIP核进行动态计算,得到小数计算结果,将整数计算结果和小数计算结果依次输入IP核乘法器和IP核进行处理,输出权重向量;
在更新后的权重的计算过程中,将当前帧的粒子权重输入IP核进行定点数转浮点数处理,得到转换后的粒子权重,将转换后的粒子权重和权重向量输入IP核乘法器进行相乘,并将得到的各个粒子的新权重存储在RAM存储器中,从RAM存储器中获取所有粒子的新权重并对各个粒子新权重进行归一化处理,并将得到的归一化后的权重输入IP核进行浮点数转定点数处理,输出各个粒子更新后的权重。
在其中一个实施例中,根据重采样后的粒子进行参数估计和粒子更新,得到粒子滤波结果和预测粒子,包括:
根据预设阈值对重采样后的粒子进行筛选,当重采样后的粒子对应的粒子值不等于预设阈值γ或γ+1时,判定重采样后的粒子为无效粒子;否则,判定重采样后的粒子为有效粒子,对有效粒子进行参数估计,得到粒子滤波结果,表示为
根据重采样后的粒子中的当前帧粒子
应该理解的是,虽然图1、图3和图4中的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图1、图3和图4中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 基于FPGA的嵌入式单目被动目标跟踪定位系统及方法
- 基于FPGA的嵌入式单目被动目标跟踪定位系统及方法