机器人系统以及工具更换方法
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及机器人系统以及工具更换方法。
背景技术
专利文献1中公开了一种机器人用臂,具有卡盘机构,该卡盘机构具备:设置于前端部的两个卡盘爪;以及使卡盘爪进行开闭动作的卡盘驱动部。根据该机器人用臂,能够在卡盘爪彼此之间握持工件、或者打开卡盘爪使工件分离。另外,根据专利文献1记载的机器人用臂,也可以替代工件而握持任意的工具。在这种情况下,通过机器人用臂的驱动,还能够进行将卡盘机构所握持的工具更换为其他工具的作业。
例如,在驱动卡盘机构的卡盘驱动部中,需要将电气、压缩空气等的驱动能量转换为机械的驱动力的机构。这样的机构通常重量重。另外,还已知有被称为工具更换器的工具更换机构,然而使用刚度高的两个板,与前述的卡盘机构同样地重量重。
专利文献1:日本特开昭61-293794
发明内容
存在以下问题:在卡盘机构或工具更换器安装于机器人臂的情况下,机器人臂的前端的重量变重,机器人臂的可搬运重量被限制。
本发明的适用例所涉及的机器人系统的特征在于,具备:机器人,具备:机器人臂;力传感器,设置于所述机器人臂;以及被嵌合部,经由所述力传感器设置于与所述机器人臂相反一侧,
工具,具有与所述被嵌合部嵌合的嵌合部;以及
控制装置,控制所述机器人的动作,
所述控制装置进行:
第一控制,基于所述力传感器的输出驱动所述机器人臂,使所述被嵌合部与所述嵌合部的嵌合解除,由此从所述机器人臂卸下所述工具;以及
第二控制,基于所述力传感器的输出驱动所述机器人臂,使所述被嵌合部与所述嵌合部嵌合,由此将所述工具安装于所述机器人臂。
附图说明
图1是示出第一实施方式所涉及的机器人系统的立体图。
图2是图1所示的机器人系统的功能框图。
图3是示出图1以及图2所示的机器人系统的硬件构成的一例的框图。
图4是示出图1所示的末端执行器的附近的局部放大立体图。
图5是示出在图4所示的末端执行器中解除被嵌合部与嵌合部的嵌合的状态的立体图。
图6是图4的剖视图。
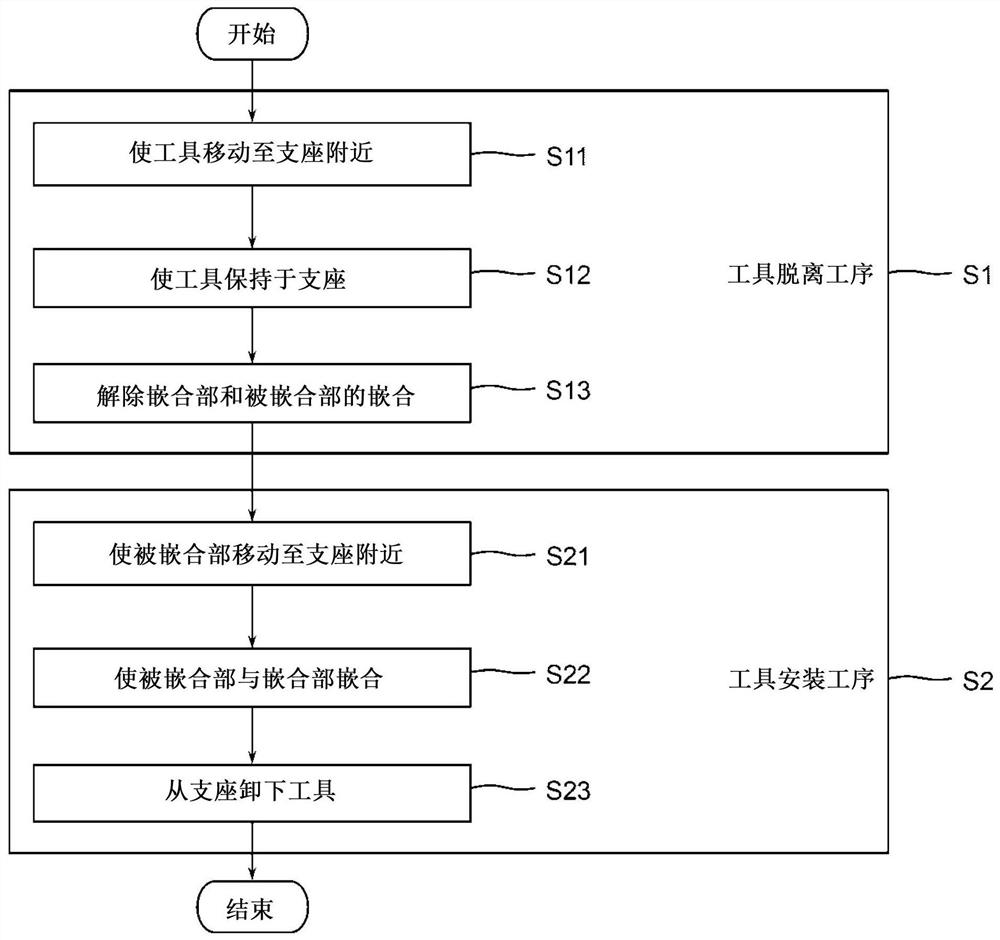
图7是示出实施方式所涉及的工具更换方法的工序图。
图8是用于说明图7所示的工具更换方法的图。
图9是用于说明图7所示的工具更换方法的图。
图10是用于说明图7所示的工具更换方法的图。
图11是用于说明图7所示的工具更换方法的图。
图12是用于说明图7所示的工具更换方法的图。
图13是用于说明图7所示的工具更换方法的图。
图14是用于说明探索控制的一例的图,并且是将观察角度不同的两个图上下排列的图。
图15是用于说明探索控制的一例的图,并且是将观察角度不同的两个图上下排列的图。
图16是用于说明探索控制的一例的图,并且是将观察角度不同的两个图上下排列的图。
图17是用于说明探索控制的一例的图,并且是将观察角度不同的两个图上下排列的图。
图18是用于说明探索控制的一例的图,并且是将观察角度不同的两个图上下排列的图。
图19是示出第二实施方式所涉及的机器人系统所具备的工具以及工具储存器的立体图。
图20是图19所示的工具以及工具储存器的剖视图。
图21是示出第三实施方式所涉及的机器人系统所具备的末端执行器的附近的局部放大立体图。
符号说明
1…机器人系统,2…机器人,3…控制装置,4…架台,5…末端执行器,5B…末端执行器,7…工具储存器,7A…工具储存器,20…基台,31…控制部,32…存储部,33…外部输入输出部,41…框体,42…脚部,43…顶板,44…搁板,45…间隔件,51…工具连接部,51B…工具连接部,52…工具,52A…工具,52B…工具,53…工具驱动部,55…嵌合部插入空间,56…拍摄部,59…力传感器,71…储存器板,200…机器人臂,201…臂,202…臂,203…臂,204…臂,205…臂,206…臂,230…驱动部,240…位置传感器,311…显示装置,312…输入装置,511…连接下部,512…连接上部,513…支撑板,514…磁石,521…嵌合部,521A…轴线,521B-1…嵌合部,521B-2…嵌合部,521a…下表面,521b…上表面,521c…侧面,521d…侧面,521e…端面,522…工具主体,523…支撑部,524…卡合爪,531…动力部,532…传递部,551…被嵌合部,551A…轴线,551B-1…被嵌合部,551B-2…被嵌合部,551a…下表面,551b…上表面,551c…侧面,551d…侧面,552…锥形部,561…照相机,562…连接体,610…控制器,620…计算机,721…支座,722…支座,723…支座,724…动力部,725…保持爪部,726…支座,727…卡合体,728…卡合孔,5221…支点部,5222…爪部,5223…前端,5241…第一部位,5242…第二部位,5245…间隙,7271…一部分,D1…第一移动方向,D2…第二移动方向,E…箭头,M2…箭头,M3…箭头,S1…工具脱离工序,S11…工序,S12…工序,S13…工序,S2…工具安装工序,S21…工序,S22…工序,S23…工序。
具体实施方式
以下,基于附图详细说明本发明的机器人系统以及工具更换方法的适当的实施方式。
1.第一实施方式
首先,说明第一实施方式所涉及的机器人系统。
图1是示出第一实施方式所涉及的机器人系统的立体图。图2是示出图1所示的机器人系统的功能框图。图3是示出图1以及图2所示的机器人系统的硬件构成的一例的框图。
此外,在本申请的各图中,将相互正交的三个轴设定为X轴、Y轴以及Z轴。Y轴以及Z轴与水平面平行,X轴是铅垂轴。另外,各图中,用箭头表示这些轴,以下的说明中,以箭头的前端侧为“正”、基端侧为“负”进行说明。而且,X轴的正侧也称为“上”,Z轴的负侧也称为“下”。另外,本说明书中的“俯视观察”是指,从沿着X轴的位置沿着X轴观察。
图1所示的机器人系统1具备:机器人2;控制装置3;架台4;安装于机器人2的工具52;以及存放工具52的工具储存器7。
1.1.机器人
其中,图1所示的机器人2具备基台20和机器人臂200。图1所示的机器人臂200是6轴的垂直多关节机器人臂。基台20固定于后述的架台4。
1.1.1.机器人臂
机器人臂200具有臂201、臂202、臂203、臂204、臂205以及臂206。这些臂201~206从基台20侧依次连结。各臂201~206相对于相邻的臂或者基台20能够转动。此外,以下的说明中,将臂206的与臂205相反一侧的端部称为“机器人臂200的前端”。
如图1所示,后述的末端执行器5与机器人臂200的前端连接。末端执行器5具备:固定于机器人臂200前端的工具连接部51;安装于工具连接部51的工具52;以及驱动工具52的工具驱动部53。工具52相对于工具连接部51能够装卸。作为工具52,可例举例如握持手、吸附手、磁吸手、螺纹固定工具、卡合工具等。连接有这样的末端执行器5的机器人系统1能够进行例如对象物的材料供给、材料移除、移动载置、输送或者组装等作业。
如图2所示,机器人2具有驱动部230,驱动部230具有使臂201~206转动的未图示的电动机和未图示的减速机。作为电动机,可例举例如AC伺服电动机、DC伺服电动机等。作为减速机,可例举例如行星齿轮型的减速机、波动齿轮装置等。另外,图2所示的机器人2具有位置传感器240。位置传感器240检测电动机或者减速机的旋转轴的旋转角度。驱动部230以及位置传感器240设置于例如基台20以及各臂201~206。并且,驱动部230能够将各臂201~206相互独立地驱动。此外,各驱动部230以及各位置传感器240分别与控制装置3可通信地连接。
机器人臂200的臂的数量也可以是1~5个或者7个以上。另外,机器人臂200也可以是SCARA机器人,也可以是具备两个或者多于两个的机器人臂200的双臂机器人。
1.1.2.力传感器
机器人2还具备设置于机器人臂200与末端执行器5之间的力传感器59。作为力传感器59,可例举6轴力传感器、3轴力传感器等。通过设置力传感器59,能够高精度地检测对末端执行器5或机器人臂200施加的力的朝向或大小。力传感器59与控制装置3可通信地连接。此外,力传感器59所处的位置不限于此,也可以设置于各臂201~206间。
1.1.3.末端执行器
如前所述,末端执行器5具备工具连接部51、工具52和工具驱动部53。
图4是示出图1所示的末端执行器5的附近的局部放大立体图。图5是示出在图4所示的末端执行器5中解除被嵌合部与嵌合部的嵌合的状态的立体图。图6是图4的剖视图。
1.1.3.1.工具连接部
工具连接部51具备连接下部511、连接上部512、支撑板513和磁石514。
连接下部511是沿着Y轴延伸的部件,通过与连接上部512组合,形成能够供后述的工具52的嵌合部521插入的嵌合部插入空间55。该嵌合部插入空间55作为与后述的工具52所具有的嵌合部521嵌合的被嵌合部551发挥功能。嵌合是指,嵌合部521与被嵌合部551嵌合。在该状态下,能够高位置精度地将嵌合部521固定于被嵌合部551。另外,每当维持固定时,不需要电气、压缩空气等的驱动能量。因此,也不需要将驱动能量转换为机械的驱动力的机构。因此,能够实现末端执行器5的轻量化以及小型化。
嵌合部插入空间55是沿着Y轴延伸的四棱柱状的空间,Y轴负侧的端面开口,Y轴正侧的端面、Z轴正侧的侧面、Z轴负侧的侧面、X轴正侧的上表面以及X轴正侧的下表面分别封闭。因此,在工具52从Y轴负侧朝向Y轴正侧移动时,换言之,在将嵌合部插入空间55从Y轴正侧朝向Y轴负侧移动时,能够使工具52所具有的嵌合部521与嵌合部插入空间55(被嵌合部551)嵌合。
此外,基于X-Z面的嵌合部插入空间55的截面形状不限于上述四边形,也可以是四边形以外的多边形,也可以是椭圆形、长圆形,也可以是其他形状。
连接下部511形成这样的嵌合部插入空间55的下表面、两侧面以及端面。另外,连接上部512是沿着Y轴延伸的部件。该连接上部512形成嵌合部插入空间55的上表面。
另外,连接上部512的Y轴正侧的端部经由支撑板513与机器人臂200的前端连接。由此,工具连接部51固定于机器人臂200。
磁石514设置于嵌合部插入空间55的Y轴正侧的端面。嵌合部521被插入嵌合部插入空间55时,磁石514用磁力吸引嵌合部521。并且,通过磁石514和嵌合部521吸附,能够将被嵌合部551和嵌合部521相互定位并固定。由此,能够容易提高工具52相对于机器人臂200的位置精度。
此外,磁石514也可以设置于工具连接部51的上述以外的位置。另外,磁石514也可以设置于工具52,也可以设置于工具连接部51和工具52这两方。
1.1.3.2.工具
本实施方式所涉及的工具52具有呈镊子状的工具主体522。具体而言,图5所示的工具52具有:沿着X轴延伸的长尺状的工具主体522;支撑工具主体522的X轴正侧的端部的支撑部523;以及从支撑部523朝向Y轴正侧突出的前述的嵌合部521。
工具主体522具备:支撑于支撑部523的支点部5221;以及从支点部5221朝向X轴负侧延伸的两个爪部5222、5222。通过在这两个爪部5222、5222彼此之间夹持对象物,能够握持对象物。另外,通过爪部5222的前端5223对对象物赋予并进力,能够进行例如沿着Z轴推或拉对象物的作业、或者进行沿着Y轴推或拉对象物的作业。
另外,工具主体522具有弹性,在自然状态即不施加外力的状态下,前端5223、5223彼此呈互相分离的形状。因此,在对爪部5222、5222向彼此接近的方向施加力时,前端5223、5223彼此接触,之后,解除施加的力时,前端5223、5223彼此自然地分离。因此,通过利用工具主体522的弹性,能够高效率地进行对象物的握持及其解除。
支撑部523位于作为被嵌合部551的嵌合部插入空间55的外侧。因此,工具主体522也位于嵌合部插入空间55的外侧,并且从支撑部523朝向X轴负侧延伸。由此,能够在爪部5222、5222的前端的周围确保宽广的空间,作业性提高。另外,通过增加爪部5222、5222的长度,在例如使支撑部523围绕Y轴转动时,即使转动角小,也能够确保更大的爪部5222、5222的前端的位移量。
嵌合部521如前所述为了与作为被嵌合部551的嵌合部插入空间55嵌合,呈沿着Y轴延伸的四棱柱状的形状。这样的嵌合部521的外表面以充分宽广的面积经由些许间隙与被嵌合部551的内表面相邻。由此,在嵌合部521作用有力矩载荷。例如,在爪部5222、5222的前端,在进行沿着Z轴推或拉对象物的作业的情况、或者进行沿着Y轴推或拉对象物的作业的情况等中,在嵌合部521的各部分产生弯曲力矩或者螺旋力矩。于是,嵌合部521以及被嵌合部551分别被施加大的负荷。但是,通过嵌合部521和被嵌合部551嵌合,即使施加大的负荷也能够抑制局部的应力集中。由此,能够抑制嵌合部521、被嵌合部551的破损或劣化等。
此外,图5中,基于X-Z面的嵌合部521的截面形状对应于嵌合部插入空间55的截面形状而设定,不限于上述四边形,也可以是四边形以外的多边形,也可以是椭圆形、长圆形,也可以是其他形状。
1.1.3.3.工具驱动部
在工具连接部51的X轴负侧设置有工具驱动部53。工具驱动部53的Y轴正侧的端部经由支撑板513与机器人臂200的前端连接。由此,工具驱动部53固定于机器人臂200。
具体而言,工具驱动部53具有产生驱动力的动力部531和将驱动力传递给工具主体522的两个传递部532、532。
动力部531产生使两个传递部532、532沿着Z轴开闭的驱动力。由此,能够使传递部532、532彼此的距离变化。在动力部531中,利用电气、压缩空气等的驱动能量,产生驱动力。
传递部532、532彼此之间配置有工具主体522。例如,如果缩短传递部532、532彼此的距离,则工具主体522的爪部5222、5222彼此也会接近。由此,能够用工具主体522握持对象物。另一方面,如果从该状态扩大传递部532、532彼此的距离,则通过工具主体522的弹性,前端5223、5223彼此也会分离。由此,能够解除基于工具主体522的对象物的握持。
此外,工具驱动部53的构成不限于上述构成。例如,传递部532也可以配置于爪部5222、5222彼此之间。在这种情况下,优选工具主体522在自然状态下,例如前端5223、5223彼此呈相互接近形状。
1.1.3.4.其他设备等
机器人系统1也可以具备除了这些以外的任意的部件、设备等。作为任意的设备,可例举例如,拍摄作业对象物、机器人2或其周边的拍摄部56、检测对机器人2施加的外力的感压传感器、检测接近机器人2的周围的物体等的接近传感器等。
在图5所示的末端执行器5安装有前述的拍摄部56。图5所示的拍摄部56具备照相机561以及连接照相机561和末端执行器5的连接体562。照相机561拍摄例如爪部5222的前端5223附近、或者检测对象物及其握持的状态等。
1.2.控制装置
图2所示的控制装置3具有控制部31、存储部32和外部输入输出部33。这样的控制装置3具有如下功能:基于位置传感器240的检测结果,向驱动部230输出驱动信号,控制机器人臂200的驱动。另外,在控制装置3连接有具备例如液晶监视器等的显示装置311和具备例如键盘等的输入装置312。
控制部31执行存储于存储部32的各种程序等。由此,控制部31能够进行机器人2的驱动的控制、各种运算、各种判断等。具体而言,控制部31具有基于力传感器59的输出,控制机器人臂200的动作的功能。由此,控制部31进行:通过使被嵌合部551与嵌合部521的嵌合解除,从机器人臂200卸下工具52的第一控制;以及通过使被嵌合部551与嵌合部521嵌合,将工具52安装于机器人臂200的第二控制。
存储部32保存控制部31能够执行的各种程序。另外,存储部32还保存外部输入输出部33受理的各种数据。
外部输入输出部33除了用于与控制装置3、机器人2、显示装置311以及输入装置312的连接以外,还用于与设于外部的任意设备类的连接。
这样的控制装置3的硬件构成没有特别限定,但如图3所示,包括例如可与机器人2通信地连接的控制器610以及可与控制器610通信地连接的计算机620。
其中,作为图3所示的处理器,可例举例如CPU(Central Processing Unit,中央处理器)、FPGA(Field-Programmable Gate Array,现场可编程逻辑门阵列)、ASIC(Application Specific Integrated Circuit,专用集成电路)等。
另外,作为图3所示的存储器,可例举例如RAM(Random Access Memory,随机存取存储器)等易失性存储器、ROM(Read Only Memory,只读存储器)等非易失性存储器等。此外,存储器不限于非装卸式,也可以具有装卸式的外部存储装置。
而且,作为图3所示的外部接口,可例举各种通信用技术。作为通信用技术,可例举例如USB(Universal Serial Bus,通用串行总线)、RS-232C、有线LAN(Local AreaNetwork,局域网)、无线LAN等。
此外,控制装置3的硬件构成不限于图3所示的构成。另外,在控制装置3中,除了前述的构成以外,还可以附加其他构成。而且,保存于存储部32的各种程序、数据等除了预先存储于存储部32以外,也可以例如存储于CD-ROM等的记录介质,从该记录介质提供,也可以经由网络等提供。
1.3.架台
图1所示的架台4具有:框体41;从框体41的下部向下方延伸的脚部42;固定于框体41的上部的顶板43以及间隔件45;以及固定于框体41的内部的搁板44。架台4设置于地板、置于地板的台上、能够在地板上移动的台车等。此外,架台4可根据需要设置,也可以省略。另外,在省略架台4的情况下,机器人2也可以直接或者经由任意的部件间接固定于地板、壁、天花板等。
图1所示的框体41是具有沿着长方体的棱线延伸的棒状的基材且将这些相互连结而成的构造体。脚部42是从框体41的下表面向下方突出的部件。
在框体41的上表面设置有顶板43以及间隔件45。并且,在顶板43上经由间隔件45设置有机器人2。
在搁板44上设置有控制装置3。图1所示的控制装置3也可以是仅放置于搁板44上,也可以使用未图示的固定工具固定于搁板44。此外,在搁板44上除了控制装置3以外,也可以设置有任意的设备例如真空泵、不停电电源装置等。
1.4.工具储存器
图1所示的工具储存器7具有储存器板71、支座721、722、723,并具有存放工具52的功能。
储存器板71是沿着Y-Z平面扩展的板体。储存器板71用未图示的脚部支撑于地板等,保持为预定高度。
支座721、722、723分别具有保持工具52的功能,并从Z轴正侧朝向Z轴负侧依次排列。其中,作为一例,在支座721以及支座723分别保持有与安装于机器人臂200的工具52不同的工具52。
支座721、722、723分别具有产生驱动力的动力部724以及通过驱动力保持工具52的两个保持爪部725、725。动力部724产生使两个保持爪部725、725沿着Z轴开闭的驱动力。由此,能够使保持爪部725彼此的距离变化。在动力部724中,利用电气、压缩空气等驱动能量,产生驱动力。另外,动力部724能够与控制装置3通信。在缩短保持爪部725彼此的距离时,能够保持工具52的支撑部523。另一方面,如果从该状态扩大保持爪部725彼此的距离,则能够解除工具52的保持。
1.5.机器人系统的控制方法
接着,说明作为机器人系统1的控制方法的实施方式所涉及的工具更换方法。
图7是示出实施方式所涉及的工具更换方法的工序图。图8至图13分别是用于说明图7所示的工具更换方法的图。
图7所示的工具更换方法包括:工具脱离工序S1,通过控制装置3,基于力传感器59的输出,从机器人臂200卸下工具52;以及工具安装工序S2,通过控制装置3,基于力传感器59的输出,将工具52安装于机器人臂200。以下,依次说明各工序。
1.5.1.工具脱离工序S1
在本工序中,将安装于机器人臂200的工具52从机器人臂200卸下,移交给支座721。本工序包括以下的工序S11、工序S12以及工序S13。
首先,作为工序S11,如图8所示,通过控制装置3,驱动机器人臂200,使工具52移动到支座721附近。该移动能够通过基于前述的位置传感器240的输出使驱动部230动作而进行。
接着,作为工序S12,使工具52的支撑部523保持于支座721。支座721如前所述具有动力部724和保持爪部725、725,在保持爪部725彼此之间能够保持工具52的支撑部523。为了使支撑部523保持于支座721,首先通过动力部724扩大保持爪部725彼此,确保能够夹持支撑部523的空间。接着,通过控制装置3,驱动机器人臂200,如图9所示,将支撑部523插入保持爪部725彼此之间。此时,进行被称为“仿真控制”的控制。
仿真控制是指以下控制:通过控制装置3监视力传感器59的输出,以使支撑部523从支座721受到的外力变小的方式驱动机器人臂200。具体而言,在将支撑部523插入保持爪部725彼此之间时,伴随着支撑部523与保持爪部725接触,通过力传感器59检测支撑部523受到的外力。
外力包括关于各轴的并进力以及旋转力这双方。并且,以使支撑部523向该外力成为零的方向退避的方式驱动机器人臂200。通过进行这样的控制,支撑部523的移动轨迹成为在反复摇摆的同时支撑部523通过保持爪部725彼此的大致中间这样的轨迹。由此,能够防止支撑部523和保持爪部725产生强干涉。其结果是,能够防止支撑部523以及保持爪部725的一方或者双方受到破损、或者以非期望的姿势保持。
并且,通过进行这样的仿真控制,能够将支撑部523顺畅地插入保持爪部725彼此之间。将支撑部523碰上Y轴负侧的最里部、支撑部523的插入完成时,通过设置于保持爪部725彼此之间的未图示的传感器检测其情况。控制装置3收到该检测信号时,向支座721的动力部724输出控制信号。由此,接近支座721的保持爪部725彼此之间,保持工具52的支撑部523。其结果是,成为工具52保持于支座721并且安装于机器人臂200的状态。此外,代替检测插入完成的前述传感器,也可以是基于位置传感器240的输出来检测插入的完成,也可以是基于力传感器59的输出进行检测,也可以是基于照相机561、其他传感器的输出进行检测。
接着,作为工序S13,通过控制装置3,驱动机器人臂200,从机器人臂200卸下工具52。为了从机器人臂200卸下工具52,需要如图10中箭头M2所示那样驱动机器人臂200,以从被嵌合部551拔出嵌合部521。此时,也进行前述的“仿真控制”。
具体而言,在从被嵌合部551拔出嵌合部521时,伴随着被嵌合部551与嵌合部521接触,通过力传感器59检测被嵌合部551受到的外力。并且,以使被嵌合部551向该外力成为零的方向退避的方式驱动机器人臂200。通过进行这样的控制,防止嵌合部521和被嵌合部551产生强干涉,并能够防止一方或者双方受到破损、或者嵌合部521成为非期望的姿势而不能拔出。
通过包括以上那样的两次仿真控制的第一控制,如图10所示,能够将安装于机器人臂200的工具52移交给支座721。此外,上述仿真控制是控制方法的一例,也可以是其他控制方法。
1.5.2.工具安装工序
在本工序中,将保持有支座722的工具52从支座722卸下,安装于机器人臂200。本工序具有以下的工序S21、工序S22以及工序S23。
首先,作为工序S21,通过控制装置3,驱动机器人臂200,如图11所示,使被嵌合部551移动到支座722附近。该移动能够通过基于例如前述的位置传感器240的输出使驱动部230动作而进行。
接着,作为工序S22,使工具连接部51的被嵌合部551与工具52的嵌合部521嵌合。具体而言,通过控制装置3,以图12中箭头M3所示那样驱动机器人臂200,使得嵌合部521插入被嵌合部551。此时,进行被称为后述“探索控制”的控制和“仿真控制”。
探索控制是指以下控制:通过控制装置3监视力传感器59的输出,根据被嵌合部551从嵌合部521受到的外力,以探寻嵌合部521向被嵌合部551插入的时机的方式驱动机器人臂200。具体而言,在使嵌合部521插入作为被嵌合部551的嵌合部插入空间55时,伴随着被嵌合部551与嵌合部521接触,由力传感器59检测被嵌合部551受到的外力。此外,后面详细说明探索控制的具体例。
接着,通过前述的仿真控制,使嵌合部521与被嵌合部551嵌合。该仿真控制是指以下控制:如前所述,通过控制装置3监视力传感器59的输出,以被嵌合部551从嵌合部521受到的外力变小的方式驱动机器人臂200。具体而言,在使被嵌合部551与嵌合部521嵌合时,伴随着被嵌合部551与嵌合部521接触,由力传感器59检测被嵌合部551受到的外力。
外力包括关于各轴的并进力以及旋转力这双方。并且,以使被嵌合部551向该外力成为零的方向退避的方式驱动机器人臂200。通过进行这样的控制,被嵌合部551的移动轨迹成为反复摇摆的同时与嵌合部521的中心线大致重叠那样的轨迹。由此,能够防止嵌合部521和被嵌合部551产生强干涉。其结果是,能够防止嵌合部521以及被嵌合部551的一方或者双方受到破损、或者以非期望的姿势而无法移动。
并且,通过进行这样的仿真控制,能够使被嵌合部551与嵌合部521顺畅地嵌合。如果嵌合完成,则磁石514吸附嵌合部521。另外,控制装置3基于例如力传感器59的输出来检测嵌合的完成。其结果是,工具52成为安装于机器人臂200并且还保持于支座722的状态。此外,嵌合的完成可以使用位置传感器240的输出代替力传感器59的输出来进行检测,也可以使用这双方进行检测,也可以使用照相机561、其他传感器的输出进行检测。
接着,作为工序S23,通过控制装置3,驱动机器人臂200,将安装于机器人臂200的工具52从支座722卸下。为了从支座722卸下工具52,首先,通过控制装置3,向支座722的动力部724输出控制信号。由此,如图13所示,扩大支座722的保持爪部725彼此的距离,从而解除工具52的保持。
通过包括以上那样的探索控制以及仿真控制的第二控制,能够将保持于支座722的工具52安装于机器人臂200。此外,上述探索控制以及仿真控制分别是控制方法的一例,也可以是其他控制方法。
在此,说明前述的探索控制。
图14至图18分别是用于说明探索控制的一例的图,并且是将观察角度不同的两个图上下排列的图。此外,在图14至图18中,示意性示出被嵌合部551以及嵌合部521。
图14所示的被嵌合部551的内表面包括位于下方的下表面551a、位于上方的上表面551b、位于Z轴正侧的侧面551c以及位于Z轴负侧的侧面551d。
图14所示的嵌合部521的外表面包括在嵌合时位于下方的下表面521a、在嵌合时位于上方的上表面521b、在嵌合时位于Z轴正侧的侧面521c、在嵌合时位于Z轴负侧的侧面521d以及端面521e。
在探索控制中,首先,如图14所示,以嵌合部521的轴线521A相对于被嵌合部551的轴线551A倾斜的状态(倾倒状态),使嵌合部521向嵌合部521的一部分插入被嵌合部551的位置相对移动。具体而言,以嵌合部521的端面521e朝向被嵌合部551的侧面551c的方式使嵌合部521倾斜。此外,嵌合部521只要相对地移动即可,因此在本实施方式的情况下,嵌合部521不移动,使被嵌合部551移动,由此成为相对地使嵌合部521移动。以下同样地记载。
接着,如图15所示,使嵌合部521向Z轴正侧移动,直至嵌合部521的端面521e与被嵌合部551的侧面551c接触为止。此外,如图15所示,在对侧面551c形成锥形部552的情况下,使嵌合部521向Z轴正侧移动,直至嵌合部521的端面521e与该锥形部552接触为止。
接着,如图16所示,使嵌合部521向X轴负侧移动,直至嵌合部521的下表面521a与被嵌合部551的下表面551a接触为止。
接着,如图17所示,使嵌合部521向Z轴负侧移动,直至嵌合部521的侧面521d与被嵌合部551的侧面551d接触为止。此外,如图15所示,在对侧面551d形成锥形部552的情况下,使嵌合部521向Z轴负侧移动,直至嵌合部521的侧面521d与该锥形部552接触为止。并且,此时的嵌合部521与被嵌合部551的位置关系是在解除前述的倾倒状态时嵌合部521能够插入被嵌合部551的位置关系。
之后,如图18所示,使倾倒状态解除。具体而言,从被嵌合部551的轴线551A相对于嵌合部521的轴线521A倾斜的状态,过渡到轴线521A与轴线551A平行的状态。由此,嵌合部521能够插入被嵌合部551。
如以上那样,本实施方式所涉及的工具更换方法是机器人系统1中的方法,机器人系统1具有:机器人2;工具52,具有与被嵌合部551嵌合的嵌合部521;以及控制装置3,控制机器人2的动作,机器人2具备:机器人臂200;力传感器59,设置于机器人臂200;以及被嵌合部551,经由力传感器59设置于与机器人臂200相反一侧。该工具更换方法具有工具脱离工序S1和工具安装工序S2。工具脱离工序S1是如下工序:通过控制装置3,基于力传感器59的输出驱动机器人臂200,并通过使被嵌合部551与嵌合部521的嵌合解除,从机器人臂200卸下工具52。工具安装工序S2是如下工序:通过控制装置3,基于力传感器59的输出驱动机器人臂200,并通过使被嵌合部551与嵌合部521嵌合,将工具52安装于机器人臂200。
根据这样的工具更换方法,通过控制装置3的动作能够进行工具52的更换,因此无需伴随人为的作业,就能够在机器人系统1进行工具52的更换。由此,能够在机器人系统1进行的各种作业中容易实现省力化。另外,通过利用嵌合部521与被嵌合部551的嵌合,不需要现有的用于更换工具52的卡盘机构、工具更换器等机构。因此,能够容易实现末端执行器5的小型化以及轻量化,还能够在小型的机器人臂200确保充分大的可搬运重量。
另外,本实施方式所涉及的机器人系统1具有:机器人2;工具52,具有与被嵌合部551嵌合的嵌合部521;以及控制装置3,控制机器人2的动作,机器人2具备:机器人臂200;力传感器59,设置于机器人臂200;以及被嵌合部551,经由力传感器59设置于与机器人臂200相反一侧。控制装置3进行第一控制和第二控制。第一控制是如下控制:基于力传感器59的输出驱动机器人臂200,通过使被嵌合部551与嵌合部521的嵌合解除,从机器人臂200卸下工具52。第二控制是如下控制:基于力传感器59的输出驱动机器人臂200,通过使被嵌合部551与嵌合部521嵌合,将工具52安装于机器人臂200。
根据这样的机器人系统1,通过控制装置3的动作能够进行工具52的更换,因此无需伴随人为的作业,就能够进行工具52的更换。由此,在机器人系统1进行的各种作业中能够容易实现省力化。另外,通过利用嵌合部521与被嵌合部551的嵌合,不需要现有的用于更换工具52的卡盘机构、工具更换器等机构。因此,能够容易实现末端执行器5的小型化以及轻量化,还能够在小型的机器人臂200确保充分大的可搬运重量。
另外,嵌合部521如前所述呈具有与轴线521A平行的轴的柱状,但优选以将轴设为法线的平面剖切时的嵌合部521的截面形状是前述的形状中的多边形或者椭圆形。换言之,沿着嵌合部521与被嵌合部551嵌合的方向的轴是与轴线521A平行的轴,以将该轴设为法线的平面剖切时的嵌合部521的截面形状优选是多边形或者椭圆形。只要是这样的形状,即使是施加例如围绕轴使嵌合部521相对于被嵌合部551转动那样的负荷的情况下,也能够防止空转。另外,这样的形状还具有容易进行嵌合作业的优点。
而且,机器人2具备磁石514作为设置于被嵌合部551并吸附于嵌合部521的吸附机构。通过设置这样的吸附机构,能够将被嵌合部551和嵌合部521相互定位并固定。由此,能够容易提高工具52相对于机器人臂200的位置精度。
此外,也可以代替吸附机构,设置与嵌合部521卡合的卡合机构。即,机器人2优选具备吸附机构或者卡合机构。作为该卡合机构,可例举例如柱塞(plunger)等。柱塞由卡合部和被卡合部的组合构成,能够进行定位等。作为这样的柱塞,可例举例如球柱塞、销柱塞、分度柱塞(index plunger)、变量柱塞(stroke plunger)、弹簧柱塞、压合柱塞(press fitplunger)、短柱塞等。
此外,卡合机构也可以设置于工具连接部51,也可以设置于工具52。
另外,如图14至图18所示的被嵌合部551具备引导嵌合部521并使嵌合部521嵌合的呈锥形形状的锥形部552。该锥形部552具有向将作为被嵌合部551的嵌合部插入空间55的内尺寸放大的方向倾斜的锥形形状。通过具备这样的锥形部552,在使被嵌合部551与嵌合部521嵌合时,即使相互的位置有些许偏差,只要使嵌合部521与锥形部552接触,就能够将嵌合部521的位置向接近被嵌合部551的轴线551A的方向引导。由此,能够放宽嵌合中的位置精度要求,能够实现工具更换方法的高速化。
此外,也可以是嵌合部521具备锥形部。另外,也可以是被嵌合部551以及嵌合部521的双方具备锥形部。
而且,本实施方式所涉及的机器人系统1具有保持工具52的支座721。并且,控制装置3在前述的第一控制中,基于力传感器59的输出驱动机器人臂200,通过使工具52保持于支座721,使嵌合部521与被嵌合部551的嵌合解除。
根据这样的构成,在将工具52暂时保管于支座721后,对于解除嵌合不使用驱动能量,仅驱动机器人臂200,就能够解除嵌合部521与被嵌合部551的嵌合。因此,在嵌合的解除时,也不需要现有的卡盘机构、工具更换器等的机构,能够容易实现末端执行器5的小型化以及轻量化。
2.第二实施方式
接着,说明第二实施方式所涉及的机器人系统。
图19是示出第二实施方式所涉及的机器人系统所具备的工具以及工具储存器的立体图。图20是图19所示的工具以及工具储存器的剖视图。
以下,说明第二实施方式,以下的说明中,以与第一实施方式的不同点为中心进行说明,对于同样的事项省略其说明。此外,各图中,对于与第一实施方式同样的构成,标注同一的符号。
前述的第一实施方式所涉及的工具储存器7中,支座721、722、723分别具有动力部724以及保持爪部725、725,相对于此,本实施方式所涉及的工具储存器7A中,支座726不具有动力部724以及保持爪部725、725。另一方面,如图19以及图20所示,支座726具有具备卡合孔728的卡合体727。卡合体727是配置在储存器板71上的板体。另外,卡合孔728是沿着X轴贯通卡合体727的孔。
另一方面,本实施方式所涉及的工具52A具有设置于支撑部523的卡合爪524。该卡合爪524具有:从支撑部523朝向Y轴负侧延伸的第一部位5241;以及从其端部朝向X轴负侧延伸的第二部位5242。
通过使这样的工具52A的卡合爪524与支座726的卡合孔728卡合,能够将工具52A保持于支座726。具体而言,通过从卡合孔728的上方插入卡合爪524的第二部位5242,卡合孔728与卡合爪524卡合。在该卡合时,也能够使用前述的探索控制以及仿真控制。
另外,在本实施方式中,可以是卡合孔728与卡合爪524嵌合,但也可以是卡合孔728中具有充分裕量地与卡合爪524卡合,另一方面,卡合体727的一部分嵌合于卡合爪524与支撑部523之间。具体而言,如图20所示,也可以是卡合爪524和支撑部523的间隙5245、与卡合体727的一部分7271嵌合。由此,在工具脱离工序S1中,在通过探索控制将卡合爪524插入卡合孔728时,通过将支撑部523按压到图19的箭头E所示的卡合体727的端面,能够容易进行沿着Y轴的位置对合。由此,能够更高效率地进行探索控制。另外,通过嵌合,能够切实地保持工具52A。
另一方面,在工具安装工序S2中,驱动机器人臂200,使得卡合爪524从卡合孔728拔出。此时,也可通过控制装置3,进行仿真控制。
在以上那样的第二实施方式中,也可得到与第一实施方式同样的效果。
另外,在本实施方式中,不需要第一实施方式所涉及的工具储存器7所具备的动力部724,因此能够实现机器人系统1中的消耗电力的降低以及构造的简单化。
而且,在本实施方式中,支座726具备作为通过供工具52A卡合而保持的卡合部的卡合孔728。并且,控制装置3在第一控制中进行控制,使得:在使工具52A的卡合爪524与卡合孔728卡合时机器人臂200的前端的移动方向即被嵌合部551的第一移动方向D1、与在使嵌合部521与被嵌合部551的嵌合解除时机器人臂200的前端的移动方向即被嵌合部551的第二移动方向D2成为非平行即不平行。
根据这样的控制,第一移动方向D1与第二移动方向D2非平行,因此当使卡合爪524与卡合孔728卡合时,在使机器人臂200的前端向第一移动方向D1移动时,能够防止该移动对嵌合部521与被嵌合部551的嵌合状态产生影响。同样地,当解除嵌合部521与被嵌合部551的嵌合时,在使机器人臂200的前端向第二移动方向D2移动时,能够防止该移动对卡合爪524与卡合孔728的卡合状态产生影响。
另外,通过第一移动方向D1与第二移动方向D2非平行,在例如从被嵌合部551拔出嵌合部521时,无需使用驱动能量继续保持工具52A。因此,控制装置3所进行的机器人系统1的控制变得容易,并且能够实现消耗电力的降低。
此外,上述“非平行”是指,第一移动方向D1与第二移动方向D2不平行的状态,但最好是,第一移动方向D1与第二移动方向D2所成的角度优选30°以上90°以下,更优选60°以上90°以下。此外,在图19以及图20所示的例中,该角度为90°。
另外,卡合爪524以及卡合孔728的构成不限于上述构成。例如卡合孔728也可以不贯通卡合体727。另外,卡合包括嵌合的概念。因此,卡合爪524也可以与卡合孔728嵌合。
3.第三实施方式
接着,说明第三实施方式所涉及的机器人系统。
图21是示出第三实施方式所涉及的机器人系统所具备的末端执行器的附近的局部放大立体图。
以下,说明第三实施方式,在以下的说明中,以与第一实施方式的不同点为中心进行说明,对于同样的事项省略其说明。此外,各图中,对于与第一实施方式同样的构成,标注同一符号。
在前述第一实施方式中,工具52具有一个呈四棱柱状的嵌合部521。相对于此,在本实施方式中,如图21所示,工具52B具有两个呈圆柱状的嵌合部521B-1、521B-2。另外,与其相应地,本实施方式所涉及的工具连接部51B具有两个被嵌合部551B-1、551B-2。
如图21所示,嵌合部521B-1、521B-2分别呈沿着Y轴延伸的圆柱状的形状。另外,嵌合部521B-1、521B-2沿着Z轴排列。而且,嵌合部521B-1的沿着Y轴的长度大于嵌合部521B-2的沿着Y轴的长度。即,两者的长度不同。
另一方面,被嵌合部551B-1、551B-2分别具有沿着Y轴延伸的呈圆柱状形状的空间。另外,被嵌合部551B-1、551B-2沿着Z轴排列。由此,在被嵌合部551B-1、551B-2中插入前述嵌合部521B-1、521B-2。而且,被嵌合部551B-1、551B-2的沿着Y轴的长度设定为嵌合部521B-1、521B-2的全长可插入的长度以上。
在这样的末端执行器5B中,通过将两个嵌合部521B-1、521B-2沿着Z轴排列,即使是在施加例如围绕Y轴使嵌合部521B-1、521B-2相对于被嵌合部551B-1、551B-2转动那样的负荷的情况下,也能够防止空转。
另外,在这样的末端执行器5B中,在工具脱离工序S1中,在从被嵌合部551B-1、551B-2拔出嵌合部521B-1、521B-2时,与第一实施方式同样地,通过仿真控制,控制被嵌合部551B-1、551B-2的移动。
而且,在工具安装工序S2中,通过探索控制以及仿真控制,使嵌合部521B-1、521B-2与被嵌合部551B-1、551B-2嵌合。
此时,嵌合部521B-1的沿着Y轴的长度如前所述大于嵌合部521B-2的沿着Y轴的长度。因此,驱动机器人臂200,将工具连接部51B从Y轴正侧接近工具52B时,首先,嵌合部521B-1到达被嵌合部551B-1的开口。在此,假设,只要嵌合部521B-1处于可插入被嵌合部551B-1的位置关系,直接过渡到后述的仿真控制即可。
另一方面,在基于力传感器59的输出检测到嵌合部521B-1未插入被嵌合部551B-1的情况下,进行探索控制。在该探索控制中,例如,控制机器人臂200的驱动,使得相对于嵌合部521B-1按压被嵌合部551B-1的周边区域,并且嵌合部521B-1的外观相对于被嵌合部551B-1的移动轨迹从外侧向内侧描绘漩涡。此时,以被嵌合部551B-1位于漩涡的直径的内侧的方式设定漩涡的直径。由此,在移动轨迹中的任一部位中,嵌合部521B-1的前端插入被嵌合部551B-1。
之后,通过前述的仿真控制,嵌合部521B-1插入被嵌合部551B-1。
如果继续进行该插入,则这次嵌合部521B-2到达被嵌合部551B-2的开口。在此,假设,只要嵌合部521B-2处于可插入被嵌合部551B-2的位置关系,直接过渡到后述的仿真控制即可。
另一方面,在基于力传感器59的输出检测到嵌合部521B-2未插入被嵌合部551B-2的情况下,进行探索控制。
在完成该探索控制后,通过前述的仿真控制,嵌合部521B-2插入被嵌合部551B-2。
经过以上那样的各工序,嵌合部521B-1、521B-2相对于被嵌合部551B-1、551B-2的嵌合完成。此外,通过使用这样的长度不同的嵌合部521B-1、521B-2,如上所述,能够对嵌合部521B-1以及嵌合部521B-2以该顺序顺次进行探索控制。即,能够避免对嵌合部521B-1以及嵌合部521B-2同时进行探索控制这样的事态。由此,即使是工具52B具备两个嵌合部521B-1、521B-2的情况,也能够高效率并且切实地使探索控制成功。换言之,在对两个嵌合部521B-1、521B-2同时进行探索控制的情况下,有可能探索控制失败,但能够避免这样的事态的发生。
在以上那样的第三实施方式中,也可得到与第一实施方式同样的效果。
此外,嵌合部521B-1、521B-2的个数不限于两个,也可以是3个以上。在这种情况下,优选各嵌合部的长度相互不同。另外,优选根据嵌合部的数量,被嵌合部的数量也设定为相同数量。而且,嵌合部521B-1以及嵌合部521B-2的外径可以彼此相同也可以不同。另外,嵌合部521B-1以及嵌合部521B-2如前所述优选具有锥形部。同样地,被嵌合部551B-1以及被嵌合部551B-2也优选具有锥形部。
如以上那样,在本实施方式所涉及的机器人系统1中,嵌合部521B-1、521B-2分别呈具有轴的圆柱状。并且,机器人2具有轴的长度彼此不同的多个嵌合部521B-1、521B-2。换言之,机器人2具有在嵌合部521B-1、521B-2与被嵌合部551B-1、551B-2嵌合的方向上长度不同的多个嵌合部521B-1、521B-2。
根据这样的构成,即使是在施加例如围绕Y轴使嵌合部521B-1、521B-2相对于被嵌合部551B-1、551B-2转动那样的负荷的情况下,也能够防止空转。另外,呈圆柱状的嵌合部521B-1、521B-2分别呈容易进行嵌合作业的形状,因此能够实现工具更换所需的时间的缩短。
以上,基于附图所示的实施方式说明了本发明的机器人系统以及工具更换方法,但本发明不限于这些实施方式。
例如,本发明的机器人系统也可以是上述实施方式的各部分的构成置换为具有同样功能的任意的构成,也可以在上述实施方式追加任意的构成。另外,本发明的机器人系统也可以组合多个上述实施方式。
另外,本发明的工具更换方法也可以在上述实施方式附加任意目的的工序。而且,本发明的工具更换方法也可以变更上述实施方式的工序的顺序。
- 机器人系统以及工具更换方法
- 一种工业机器人末端工具的快速更换装置及其更换方法