一种装备水下激光增材原位抢修的工作平台及其使用方法
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及水下激光增材修复技术领域,特别是涉及一种装备水下激光增材原位抢修的工作平台及其使用方法。
背景技术
在各种大型远洋船舶和深海资源开采设备的服役过程中,结构件除了受到正常工作载荷之外,还容易在海水环境中引起严重腐蚀,且海洋工程结构件大部分位于水下环境,损伤后的结构件更换困难且不具有返厂维修的条件。对于受损的结构件,需要及时进行现场应急修复,因此,水下原位修复技术的研究和发展对于海洋工程结构的维护修复有着不可替代的重要意义。
增材制造技术,利用零件三维数据驱动设备,采用材料逐渐累加的方法,可以快速精密地制造出任意复杂形状的零件,大大减少了加工工序,缩短了加工周期。水下激光填丝增材制造技术,具有较高的效率和工艺适应性,易于控制进行自动化修复,是一种高效可靠的水下修复技术。相较于传统电弧热源,激光热源具有较高的能量密度和极优的指向性,同时可以利用光纤将激光束传输到任意所需位置,便于修复设备的集成和小型化。然而,目前为止,关于水下激光增材原位修复的研究鲜有报道,大型远洋设备应急原位抢修能力十分有限,至今仍缺乏现场实施的原位抢修设备。
发明内容
本发明的目的是提供一种装备水下激光增材原位抢修的工作平台及其使用方法,以解决上述现有技术存在的问题,能够实现远洋设备的水下激光增材原位抢修。
为实现上述目的,本发明提供了如下方案:
本发明提供一种装备水下激光增材原位抢修的工作平台,适用于大型远洋设备应急原位抢修,其结构包括水下三维运动机构,所述水下三维运动机构顶部设有水下激光增材系统,所述水下三维运动机构底部用于与待修复工件固定吸附连接;所述水下激光增材系统包括激光头密封罩,所述激光头密封罩内设有激光头,激光头密封罩和激光头轴线重合,所述激光头经防水光纤外接有光纤激光器;所述激光头密封罩底部固定连接有水下激光增材焊炬,所述水下激光增材焊炬顶部能够透射激光头发射的激光,所述水下激光增材焊炬底部能够与待修复工件密封连接,所述水下激光增材焊炬内设有三维扫描装置和丝材导引管,三维扫描装置与激光束的位置保持相对固定,在水下激光增材修复前扫描待修复环境,设计增材修复路径,指导水下三维运动机构行进,所述丝材导引管内用于输送金属丝,金属丝经丝材导引管抵达待修复工件的受损部位,且仅有抵达待修复部位的金属丝端部处于激光束在待修复部位表面上的激光光斑内部,所述水下激光增材焊炬内能够通过供气装置维持干燥腔;所述水下三维运动机构、水下激光增材系统和供气装置分别与控制系统电气连接。
可选的,所述水下三维运动机构包括横向直线滑台、纵向直线滑台、垂直升降滑台;所述横向直线滑台的一端侧面设有横向驱动电机,垂直升降滑台的一端侧面设有垂直驱动电机,两个纵向直线滑台的一端均设有纵向驱动电机;两个所述纵向直线滑台上均滑动安装有水平转接板,所述横向直线滑台下表面的两端与所述水平转接板固定连接,经纵向驱动电机驱动纵向直线滑台上的横向直线滑台可实现纵向移动;所述横向直线滑台一侧滑动安装有垂直转接板,所述垂直升降滑台经螺钉与垂直转接板固定连接,经横向驱动电机驱动垂直升降滑台可实现横向移动;所述垂直升降滑台一侧安装有转接板,所述转接板上固定有所述激光头密封罩,经垂直驱动电机驱动激光头密封罩可实现垂直移动。进一步优选的,横向直线滑台、纵向直线滑台和垂直升降滑台相互垂直设置,横向直线滑台两端与纵向直线滑台滑动连接,横向直线滑台中部与垂直升降滑台滑动连接,经横向驱动电机、纵向驱动电机和垂直驱动电机的驱动,激光头密封罩内的激光头可实现横向、纵向和垂直方向上的移动。所述的激光头密封罩和激光头的轴线与垂直升降滑台的轴向方向相同;所述的横向驱动电机、纵向驱动电机和垂直驱动电机为集成式防水驱动电机,所述的横向直线滑台、纵向直线滑台、垂直升降滑台、水平转接板、垂直转接板和转接板的材质为优质铝型材,完全适应水下修复的工作环境。
可选的,所述纵向直线滑台底部设有姿态调整装置,所述姿态调整装置底部安装有真空吸盘,所述真空吸盘用于与所述待修复工件表面固定吸附连接。
可选的,所述姿态调整装置包括与所述纵向直线滑台底部连接的旋转调节轴,所述旋转调节轴下方设有防水外壳;所述防水外壳上部开孔处固定有动密封环,所述旋转调节轴与动密封环内侧密封连接;所述旋转调节轴下表面中心部位设有螺纹孔,所述螺纹孔内螺纹连接有调节螺杆,所述调节螺杆底部经联轴器传动连接有电动机,所述电动机经四个紧固螺栓固定安装于所述防水外壳内的夹持固定工具上;所述旋转调节轴下表面一侧设有微型测距仪,用于测量旋转调节轴下表面与防水外壳下表面的距离;动密封环、旋转调节轴、调节螺杆、联轴器和电动机轴线处于同一直线上。
可选的,所述水下激光增材焊炬包括排水装置法兰盘,所述排水装置法兰盘中心位置处设有与所述激光头密封罩底部固定连接的圆盘形固定器;所述圆盘形固定器中心开有上下贯通的通孔,通孔上密封安装有玻璃片,所述圆盘形固定器上设有送丝口,送丝口上设有所述丝材导引管,所述圆盘形固定器下表面固定有所述三维扫描装置;所述排水装置法兰盘上部侧壁处设有多个径向的内干燥腔进气口,于本实施例中其数量至少为六个;所述排水装置法兰盘底部固定密封连接有内层排水筒体和外层排水筒体,所述内层排水筒体、外层排水筒体和排水装置法兰盘之间的区域形成为外干燥腔,所述内层排水筒体和排水装置法兰盘之间的区域形成为内干燥腔,所述内干燥腔进气口与所述内干燥腔连通;所述外层排水筒体上部设有多个外干燥腔进气口,于本实施例中,其数量至少为四个,外干燥腔进气口和外层排水筒体内壁相切,外干燥腔进气口沿外层排水筒体内壁切向设置,环形气流有利于保持外干燥腔的稳定;外干燥腔进气口经快插气动接头与空气压缩机出气口连接,内干燥腔进气口经快插气动接头与保护气气瓶出气口连接,在维持稳定的局部干燥空腔的同时控制成本;所述外层排水筒体底部设有伸缩式排水密封垫,所述伸缩式排水密封垫能够与待修复工件表面密封抵接。
可选的,所述供气装置包括空气压缩机和保护气气瓶,所述外干燥腔进气口经快插气动接头与空气压缩机出气口连接,内干燥腔进气口经快插气动接头与保护气气瓶出气口连接。
可选的,所述激光头密封罩内设有MEMS陀螺仪,所述MEMS陀螺仪固定在激光头的上部;所述激光头密封罩内设有送丝机构,所述送丝机构输出的金属丝能够经丝材导引管抵达待修复工件的受损部位。
可选的,所述伸缩式排水密封垫包括能够折叠的橡胶圈,所述橡胶圈底部固定连接有柔性衬套裙;伸缩式排水密封垫向下延伸出外层排水筒体下端。
可选的,所述玻璃片为增透型玻璃,所述玻璃片经玻璃安装架固定在所述圆盘形固定器上,所述玻璃安装架与所述圆盘形固定器螺纹连接,所述玻璃安装架与圆盘形固定器间设有环形密封环。
本发明还提供一种装备水下激光增材原位抢修的工作平台的使用方法,包括如下步骤:
步骤一,开启空气压缩机,压缩空气进入水下激光增材焊炬的外干燥腔,待水下激光增材焊炬下部有气体逸出时,将水下三维运动机构放置在水下待修复工件上方,真空吸盘与待修复工件表面紧密贴合;
步骤二,外干燥腔稳定时,利用水下三维运动机构将水下激光增材焊炬移动至待修复工件正上方,伸缩式排水密封垫的柔性衬套裙与待修复工件所在面紧密贴合;
步骤三,水下三维运动机构带动水下激光增材焊炬在待修复工件上方行走,经三维扫描装置对待修复工件表面进行扫描后将数据传输至控制系统,控制系统对待修复工件破损部位进行三维建模和空间重构,对增材路径进行规划;
步骤四,开启保护气气瓶,保护气进入水下激光增材焊炬的内干燥腔,开启光纤激光器和送丝机构,按照规划的增材路径,对待修复工件表面的损伤部位进行填丝式水下激光增材修复;
步骤五,修复工作完成后,关闭光纤激光器和送丝机构,关闭保护气气瓶,维持空气压缩机的工作状态,保持水下激光增材焊炬的外干燥腔稳定,直至水下激光增材原位抢修设备完全移出水面。
本发明相对于现有技术取得了以下技术效果:
本发明采用高压空气从水下激光增材焊炬喷出成形局部干燥空间,在水下激光增材过程中利用高压保护气体进行保护,三维水下运动机构材质为优质铝合金,驱动电机、激光头和姿态调整装置具有防水设计,光纤激光器和供气装置处于空气环境并通过防水光纤和输气管路与水下修复平台连接,完全适应水下增材修复的原位抢修工作;利用水下激光增材焊炬内的三维扫描装置对待修复工件的破损部位进行三维扫描,并将数据传输至控制系统,对破损部位进行空间重构,规划增材路径;利用激光头上安装的MEMS陀螺仪和水下激光增材焊炬内的三维扫描装置实时感知水下激光增材焊炬的空间位置和实时姿态,水下原位抢修平台经水下三维运动机构和姿态调整装置实时调整恢复至目标姿态。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
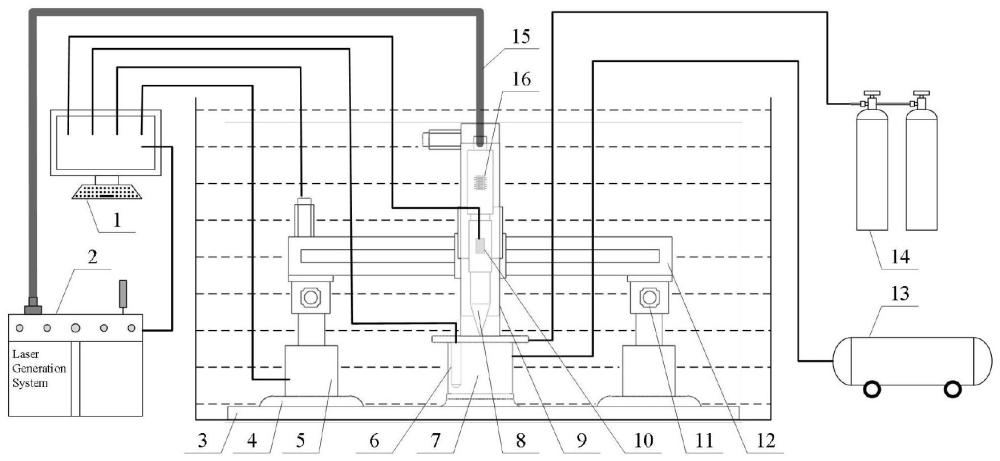
图1是本发明装备水下激光增材原位抢修的工作平台整体结构示意图;
图2是本发明水下三维运动机构、水下激光增材系统和水下激光增材焊炬布置结构示意图;
图3是图2的主视图;
图4是图2的侧视图;
图5是本发明的水下激光增材焊炬的剖面示意图;
图6是本发明的姿态调整装置的剖面示意图;
图中:1-控制系统;2-光纤激光器;3-待修复工件;4-真空吸盘;5-姿态调整装置;501-旋转调节轴;502-防水外壳;503-微型测距仪;504-紧固螺栓;505-夹持固定工具;506-电动机;507-联轴器;508-调节螺杆;509-动密封环;6-三维扫描装置;7-水下激光增材焊炬;701-排水装置法兰盘;702-外层排水筒体;703-内层排水筒体;704-橡胶圈;705-柔性衬套裙;706-丝材导引管;707-金属丝;708-熔池;709-外干燥腔进气口;710-内干燥腔进气口;711-圆盘形固定器;712-玻璃片;713-玻璃安装架;8-激光头;9-激光头密封罩;10-送丝机构;11-驱动电机;12-水下三维运动机构;13-空气压缩机;14-保护气气瓶;15-防水光纤;16-MEMS陀螺仪。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种装备水下激光增材原位抢修的工作平台及其使用方法,以解决上述现有技术存在的问题,能够实现远洋设备的水下激光增材原位抢修。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
本发明提供一种装备水下激光增材原位抢修的工作平台,如图1、图2、图3、图4、图5和图6所示,包括控制系统1、水下运动牵引系统、水下激光增材系统和供气装置;水下运动牵引系统包括水下三维运动机构12、MEMS陀螺仪16、姿态调整装置5、真空吸盘4;水下激光增材系统包括光纤激光器2、防水光纤15、激光头密封罩9、激光头8、送丝机构10、水下激光增材焊炬7、三维扫描装置6;供气装置包括空气压缩机13、保护气气瓶14;水下运动牵引系统、水下激光增材系统和供气装置分别与控制系统1电气连接;本实施例中MEMS陀螺仪16即微机械陀螺仪。
具体的,光纤激光器2经防水光纤15与激光头密封罩9内部的激光头8连接,激光头密封罩9经转接板与水下三维运动机构12连接,由图2、图3和图4可以看出,水下三维运动机构12底部设有姿态调整装置5,姿态调整装置5底部设有真空吸盘4,真空吸盘4放置在在待修复工件3表面。激光头密封罩9下方设有水下激光增材焊炬7,由图5可以看出,水下激光增材焊炬7结构包括排水装置法兰盘701、外层排水筒体702、内层排水筒体703和可折叠的橡胶圈704以及柔性衬套裙705;内层排水筒体703位于外层排水筒体702内部,二者同轴设置,内层排水筒体703和外层排水筒体702上端面与排水装置法兰盘701下端面密封连接;内层排水筒体703、外层排水筒体702和排水装置法兰盘701之间的区域为外干燥腔,外层排水筒体702上部呈圆形阵列设有至少四个外干燥腔进气口709,外干燥腔进气口709通过快插气动接头经输气管路与空气压缩机13出气口相连,外干燥腔进气口709和外层排水筒体702内壁相切;内层排水筒体703和排水装置法兰盘701之间的区域为内干燥腔,排水装置法兰盘701上呈圆形阵列设有至少六个沿排水装置法兰盘701径向设置的内干燥腔进气口710,内干燥腔进气口710通过快插气动接头经输气管路与保护气气瓶14出气口相连;排水装置法兰盘701中心部位设有圆盘形固定器711,圆盘形固定器711中心开有上下贯通的通孔,通孔上密封安装有玻璃片712,圆盘形固定器711上设有送丝口,送丝口上设有丝材导引管706,圆盘形固定器711下表面固定有三维扫描装置6;外层排水筒体702下部设有伸缩式排水密封垫,伸缩式排水密封垫包括可折叠橡胶圈704和柔性衬套裙705。所述的送丝机构10送出的金属丝707经丝材导引管706到达待修复工件3表面;玻璃片712为增透型玻璃,玻璃片712经玻璃安装架713固定在排水装置法兰盘701中心部位的圆盘形固定器711上,玻璃安装架713与圆盘形固定器711间设有环形密封环,所述玻璃安装架713通过外螺纹安装在圆盘形固定器711的内螺纹上;所述的伸缩式排水密封垫向下延伸出外层排水筒体702下端并紧密贴合在待修复工件3表面。所述的光纤激光器2、水下三维运动机构12、姿态调整装置5、送丝机构10、三维扫描装置6与控制系统1电气连接。控制系统为PC上位机,可实现激光输出参数和丝材送进参数的调节、修复环境的空间重构和增材修复路径的规划控制、水下激光增材焊炬的运动及其姿态的调整。三维扫描装置6对待修复工件3表面的破损部位进行三维全景扫描并将实时信号传输给控制系统1,控制系统1对待修复环境进行空间重构并规划水下激光增材修复路径。
水下三维运动机构12的垂直升降滑台上设有转接板,转接板上固定有激光头密封罩9,激光头密封罩9内设有激光头8,激光头8下方设有水下激光增材焊炬7,经驱动电机11驱动可实现激光头8和水下激光增材焊炬7的空间位置变化,并依控制系统1的指令进行水下激光增材修复,本实施例中所采用的驱动电机11为集成式防水驱动电机。
由图6可以看出,姿态调整装置5结构包括防水外壳502、动密封环509、旋转调节轴501、调节螺杆508、联轴器507、电动机506、夹持固定工具505、紧固螺栓504、微型测距仪503;防水外壳502上部固定有动密封环509,旋转调节轴501与动密封环509密封连接;旋转调节轴501下方设有调节螺杆508,旋转调节轴501下表面中心部位设有螺纹孔,调节螺杆508上设有外螺纹,调节螺杆508经螺纹配合安装在旋转调节轴501下方;旋转调节轴501下表面设有微型测距仪503,用于测量旋转调节轴501下表面与防水外壳502下表面的距离;防水外壳502下部设有夹持固定工具505,电动机506经四个紧固螺栓504固定在夹持固定工具505上,电动机506轴经联轴器507与调节螺杆508下部固定连接;所述的动密封环509、旋转调节轴501、调节螺杆508、联轴器507和电动机506轴线处于同一直线上。
MEMS陀螺仪在水下激光增材修复过程中获取反应工作平台姿态的实时倾侧角度信号并传输给控制系统1,控制系统1对实时倾侧角度信号和所述的三维扫描装置6获取的三维全景实时扫描信号进行综合分析,计算得出水下原位抢修平台与待修复工件3的空间偏移量,参照目标增材路径发出控制指令,分别发送牵引控制信号和调节控制信号至所述的水下三维运动机构12和所述的姿态调整装置5;水下三维运动机构12利用牵引控制信号控制水下激光增材焊炬7在三个相互垂直方向上进行直线运动,消除原位抢修平台与破损部位的空间偏移量;姿态调整装置5利用姿态调整信号控制电动机506驱动调节螺杆508,使旋转调节轴501进行上下运动,并通过旋转调节轴501下方设置的微型测距仪503对调节距离进行测量并将数据传输给控制系统1完成闭环反馈,水下原位抢修平台经水下三维运动机构12和姿态调整装置5的统一调整恢复至目标姿态,继续依照目标增材修复路径完成修复作业。
本发明提供的装备水下激光增材原位抢修的工作平台的使用方法,包括如下步骤:
步骤一,开启空气压缩机13,压缩空气经快插气动接头进入水下激光增材焊炬7外干燥腔,待水下激光增材焊炬7下部有气体逸出时,利用外部夹持装置将水下三维运动机构12放置在水下待修复工件3上方,真空吸盘4与待修复工件3表面紧密贴合,使水下激光增材原位抢修的工作平台与待修复工件3保持相对固定。
步骤二,局部干燥空腔稳定时,利用水下三维运动机构12将水下激光增材焊炬7移动至待修复工件3正上方,伸缩式排水密封垫的柔性衬套裙705与待修复工件3所在面紧密贴合。
步骤三,水下三维运动机构12带动水下激光增材焊炬7在待修复工件3上方行走,经三维扫描装置6对待修复工件3表面进行扫描后将数据传输至控制系统1,控制系统1对待修复工件3破损部位进行三维建模和空间重构,对增材路径进行规划。
步骤四,开启保护气气瓶14,保护气经快插气动接头进入水下激光增材焊炬7内干燥腔,在已形成的稳定局部干燥空腔中营造一个由保护气体保护的小型局部干燥环境,开启光纤激光器2和送丝机构10,激光经玻璃片进入水下激光增材焊炬7内部,在待修复工件表面形成熔池708,按照规划的增材路径,对待修复工件3表面的损伤部位进行填丝式水下激光增材修复。
步骤五,修复工作完成后,关闭所述光纤激光器2和送丝机构10,关闭保护气气瓶14,维持空气压缩机的工作状态,保持水下激光增材焊炬7内部局部干燥空间的稳定,直至水下激光增材原位抢修的工作平台完全移出水面。
在上述步骤三和步骤四的过程中,开启姿态调整装置5并保持姿态调整装置5处于正常工作状态;在水下激光增材修复的过程中,水下激光增材原位抢修工作平台因外部因素与待修复工件3表面的破损部位产生一定的空间偏移量,利用激光头上部设置的MEMS陀螺仪16实时获取反应工作平台姿态的倾侧角度信号,利用水下激光增材焊炬7内部设置的三维扫描装置6实时获取激光光斑与待修复工件3表面的破损部位的偏移距离信号,控制系统1对实时接收的侧倾角度信号和偏移距离信号进行综合分析,根据目标姿态计算控制量并生成控制指令,受控对象控制指令转化为牵引控制信号和调节控制信号并分别发送给水下三维运动机构12和姿态调整装置5;水下三维运动机构12利用牵引控制信号控制水下激光增材焊炬7在三个相互垂直方向上进行直线运动,消除原位抢修平台与破损部位的空间偏移量;姿态调整装置5利用姿态调整信号控制电动机506驱动调节螺杆508,使旋转调节轴501进行上下运动,并通过旋转调节轴501下方设置的微型测距仪503对调节距离进行测量并将数据传输给控制系统1完成闭环反馈,原位抢修平台经水下三维运动机构12和姿态调整装置5的统一调整恢复至目标姿态。
在本发明的描述中,需要说明的是,术语“中心”、“顶”、“底”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“笫二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。