一种全息光存储系统中的伺服平台、复用方法及校准方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及全息存储领域,更具体地,涉及一种全息光存储系统中的伺服平台、复用方法及校准方法。
背景技术
全息光存储技术是将数据信息转换为二维数字图像并加载到信号光中,携带数据信息的信号光与参考光在存储介质中发生干涉并对其进行曝光形成周期性折射率调制的全息光栅,以将信息保存下来的存储方式。通过使用单独的再现参考光对全息图进行照射可再现出携带数据信息的信号光,从而实现对所存储信息的读取。由于其具有存储容量大且存储寿命长等优点,成为一种极具前景的档案级数据存储方式。
由于全息图在存储介质内是以占有一定体积的体光栅结构存在,因此为实现更高的存储容量,需要对全息图进行复用记录。在使用球面波参考光的离轴全息存储光路系统中,移位复用和交叉复用是最主要的复用方法。在使用球面波参考光的离轴全息光路系统中,光栅矢量方向由信号光和参考光的光轴方向决定。根据布拉格条件,信号光波矢、参考光波矢和全息光栅方向矢量构成一个矢量三角形,且全息光栅方向矢量方向指向参考光。当记录全息图后将介质移动一小段距离后,三个矢量不再构成三角形,布拉格条件不再成立,原记录全息图将不能再现,于是便可以记录下一个全息图,从而实现移位复用记录。如图1所示,移位复用记录可以实现在一个区域内以移位重叠的方式记录大量全息图,从而增加存储容量。如图2所示,在使用球面波参考光的离轴全息存储光路系统中,由于其全息光栅具有方向性,还可通过绕光头旋转存储介质的方法,改变所记录全息图的全息光栅矢量的方位角,从而实现交叉复用。无论何种复用方式,再现全息图读取信息的过程中,再现数据的质量对再现参考光与全息图的偏离具有一定的敏感性。为使得读取过程中,再现参考光能够精确匹配记录时的波前,需要对全息图相对光头的空间位置、方位角、倾斜角等进行精准控制。为能精确定位全息光栅矢量的方向,需要设置绕光头转动的精密转台;而精确定位全息图,需要在存储介质即全息光盘上设置标记结构,并通过精密光学传感器测量光头相对这些标记的偏离;此外,为测量并矫正存储介质的倾斜,也需要设置相应的传感器以及矫正机构。
现有光存储技术,诸如DVD、蓝光光存储,在其读写过程中光盘高速旋转但不需要平移,其寻址、精确定位、倾斜影响矫正均通过移动光头来实现。而全息光存储中,光头结构复杂,通过移动光头实现以上功能难度较大。同时,全息光存储是通过参考光和信号光干涉形成光栅条纹来记录信息的,如果在读写过程中移动光头,很容易改变读写光和信号光的相关参数,从而造成全息图写入失败或读取的困难。因此,针对全息光存储需要设计一种全新的伺服控制方式,并利用伺服位移平台实现上述功能,对全息光存储产品化来说,是十分重要的。
发明内容
本发明旨在克服上述现有技术的至少一种缺陷(不足),提供一种全息光存储系统中的伺服平台、复用方法及校准方法,用于解决全息光存储系统中移动光头难度大以及容易导致全息图读写失败的问题。
本发明采取的技术方案是,一种全息光存储系统中的伺服平台,应用于全息光存储系统中,实现对存储介质姿态的调整,包括光头、传感器、公转平台、线性平移台以及自转平台;所述光头用于输出读写光和伺服光;所述传感器用于检测所述存储介质相对所述光头的姿态误差,并生成控制信号;所述公转平台、线性平移台以及自转平台相互连接,用于放置所述存储介质以及带动所述存储介质与所述光头发生位置移动;还包括:姿态调整平台,所述姿态调整平台用于支撑放置所述存储介质的平台,以及根据所述控制信号,对所述存储介质相对所述光头的位置和姿态进行调整。
进一步的,所述存储介质放置于所述自转平台上,所述自转平台驱动所述存储介质围绕自身中心进行自转;
所述自转平台安装于所述姿态调整平台中,所述姿态调整平台根据所述控制信号,对所述自转平台的姿态进行调整;
所述姿态调整平台安装于所述线性平移台中,所述线性平移台带动所述姿态调整平台沿公转圆直径方向进行平移;
所述线性平移台安装于所述公转平台中,所述公转平台带动所述线性平移台围绕所述光头进行公转。
进一步的,所述姿态调整平台用于实现所述自转平台沿公转圆直径方向的径向平移,以及实现所述自转平台沿垂直公转面方向的上下移动。
进一步的,所述姿态调整平台还用于实现所述自转平台围绕光头所在位置处光道的切线方向的倾斜转动,以及实现自转平台围绕存储介质的径向方向的倾斜转动。
进一步的,所述姿态调整平台为矩形框,所述自转平台为矩形,设置于所述姿态调整平台中间,所述自转平台的三条侧边分别设置有可沿垂直公转面方向移动的竖向微动平台,以实现所述自转平台沿垂直公转面方向的上下移动、以及所述自转平台围绕光头所在位置处光道的切线方向和存储介质的径向方向的倾斜转动。所述自转平台的剩余侧边设置有可沿公转圆直径方向移动的径向微动平台,以实现所述自转平台沿公转圆直径方向的径向平移。
在全息光存储系统中,为实现更高的存储容量,需要对全息图进行复用记录,其中移位复用和交叉复用是最主要的复用方法。本发明在进行存储介质的读写过程中,光头固定于公转平台中心处,用于输出读写光与伺服光,进行存储介质中全息图的记录或读取,存储介质放置并固定于自转平台上。转动公转平台,带动存储介质围绕光头进行公转,可以设置所读写的全息图光栅方向与光道切线的夹角,从而对交叉复用通道进行选择。而通过平移线性平移台,带动存储介质沿公转圆直径方向进行平移,可以对光道进行选择,以实现在不同光道上进行全息图的读写;或者通过平移线性平移台,带动存储介质沿公转圆直径方向进行平移,在沿存储介质直径方向进行移位复用读写。转动自转平台,带动存储介质围绕自身中心进行自转,可使光头沿光道进行移位复用读写。而传感器用于检测存储介质相对光头的姿态误差,并生成控制信号,姿态调整平台则根据对应的控制信号,对存储介质姿态进行调整。存储介质相对光头的姿态误差,具体包括:光头相对存储介质的径向偏离误差、竖直方向偏离误差、存储介质的倾斜偏离误差,其中,径向为公转圆直径方向,竖直方向为垂直公转面方向,倾斜偏离为存储介质与公转面平面的偏离,因此姿态调整平台设置竖向微动平台以及径向微动平台进行上述各姿态的调整。当传感器检测到存储介质姿态存在误差时,通过调整径向微动平台的移动可矫正存储介质沿径向的偏离;通过调整竖向微动平台的移动,可以矫正存储介质在竖直方向的偏离以及倾斜。
为了精准控制调整存储介质的位置姿态,本发明中,径向微动平台数量为一个,与自转平台的一条侧边相连,可沿公转圆直径方向上进行伸缩移动,从而在公转圆直径方向上对存储介质的位置进行微调,而竖向微动平台数量为三个,分别与自转平台剩下的三条侧边相连,三个竖向微动平台可分别独立在与公转面垂直的方向上进行伸缩移动,从而在与公转面垂直的方向上微调存储介质的竖直位置以及倾斜状态。通过控制径向微动平台与竖向微动平台伸缩移动,可以实现全息光存储过程中的锁轨、对焦以及调整存储介质的倾斜角度的功能。其中,锁轨,具体操作为,控制所述径向微动平台沿公转圆直径方向的伸缩移动,使存储介质在公转圆直径方向上产生微小径向平移,从而使光头准确的对准光道,实现锁轨。对焦,具体操作为,控制所述竖向微动平台沿垂直公转面方向进行等量的伸缩移动,使存储介质在垂直公转面方向上下移动,从而调整读写光和伺服光的聚焦光斑在垂直公转面方向上相对于存储介质的位置,实现读写光和伺服光的精准对焦。调整光盘的倾斜角度,具体操作为,控制三个竖向微动平台沿垂直公转面方向进行不等量的伸缩移动,以调整存储介质在围绕光头所在位置处光道的切线方向和存储介质的径向方向的倾斜角度,实现对存储介质的倾斜姿态进行矫正,保证存储介质位于恰当的平面内,从而确保全息存储信息的有效读写。
进一步的,所述自转平台为中空扁平结构,所述存储介质放置于所述自转平台的中空部分;
所述自转平台中设有固定结构以及自转驱动结构,所述固定结构与所述自转驱动结构相连,所述固定结构用于从所述存储介质的外沿固定所述存储介质,所述自转驱动结构用于从所述存储介质的外沿驱动所述存储介质围绕自身中心进行自转。
进一步的,所述自转平台为中空扁平结构,所述存储介质放置于所述自转平台的中空部分;
所述自转平台中设有固定结构以及自转驱动结构,所述固定结构与所述自转驱动结构相连,所述固定结构用于从所述存储介质的中心固定所述存储介质,所述自转驱动结构用于从所述存储介质的中心驱动所述存储介质围绕自身中心进行自转。
进一步的,所述自转平台的中空部分为一条侧边向内凹陷的矩形,所述固定结构位于所述矩形的向内凹陷的侧边的中心。存储介质位于自转平台上时,存储介质的中心位于公转圆的直径上。
进一步的,所述自转平台的中空部分为两个长边相邻的矩形,所述自转平台的非中空部分为所述两个长边相邻的矩形之间的横梁,所述固定结构位于所述自转平台的非中空部分中心。存储介质位于自转平台上时,存储介质的中心位于公转圆的直径上。
本发明中,自转平台设置为中空扁平结构,可最大限度的暴露存储介质的正反面,有利于进行存储介质的透射式读写。
进一步的,所述公转平台为中空扁平结构,所述线性平移台安装于所述公转平台的中空部分,所述光头安装于所述公转平台中心;
所述公转平台包括公转驱动结构,所述公转驱动结构与所述平移台相连,驱动所述线性平移台围绕所述光头进行公转。
进一步的,所述线性平移台为中空扁平结构,所述姿态调整平台安装于所述平移台的中空部分;
所述线性平移台包括平移驱动结构,所述平移驱动结构与所述姿态调整平台相连,驱动所述姿态调整平台沿公转圆直径方向进行平移。
进一步的,所述姿态调整平台为中空扁平结构,所述自转平台安装于所述姿态调整平台的中空部分。
此外,本发明中,径向微动平台和竖向微动平台可以具体为若干压电陶瓷或音圈电机,对其施加电压则可在特定方向上产生位移。
而存储介质可以为中空或非中空的圆形全息光盘,其上有用于记录全息图的感光介质和用于定位的标记结构。
另一方面,本发明提供的另一种技术方案为,一种交叉复用和移位复用的方法,使用如上所述的伺服平台进行交叉复用和移位复用,包括以下步骤:
选择交叉复用通道,通过所述公转驱动结构驱动所述线性平移台转动,以带动所述存储介质围绕所述光头进行公转,改变所述存储介质上所记录的全息图的光栅矢量相对于光道切线的夹角,对交叉复用通道进行设定;
选择光道,通过平移驱动结构驱动所述姿态调整平台沿公转圆直径方向平移,以使所述光头定位到所需光道;
沿光道进行移位复用,通过自转驱动结构驱动所述存储介质进行自转,所述光头沿所述存储介质上的光道进行全息图的移位复用记录和读取。
另一方面,本发明提供的另一种技术方案为,一种全息光存储系统中存储介质的伺服校准的方法,使用如上所述的伺服平台进行存储介质的伺服校准,包括以下步骤:
所述传感器检测所述存储介质相对所述光头的姿态误差,并生成控制信号;
所述姿态调整平台根据所述控制信号,对所述存储介质相对所述光头的姿态进行调整,所述调整包括:锁轨、对焦以及调整所述存储介质的倾斜角度;
锁轨,具体包括步骤:控制所述径向微动平台沿公转圆直径方向的伸缩移动,使存储介质在公转圆直径方向上产生微小径向平移,从而使光头准确的对准光道,实现锁轨;
对焦,具体包括步骤:控制所述竖向微动平台沿垂直公转面方向进行等量的伸缩移动,使存储介质在垂直公转面方向上下移动,从而调整读写光和伺服光的聚焦光斑在垂直公转面方向上相对于存储介质的位置,实现读写光和伺服光的精准对焦;
调整所述存储介质的倾斜角度,具体包括步骤:控制三个竖向微动平台沿垂直公转面方向进行不等量的伸缩移动,以调整存储介质围绕光头所在位置处光道的切线方向和存储介质的径向方向的倾斜角度,实现对存储介质的倾斜姿态进行矫正。
与现有技术相比,本发明的有益效果为:
1、本发明设置公转平台、线性平移台以及自转平台,通过存储介质相对光头进行位置变换,有效实现全息图的移位复用以及交叉复用记录与读取,提高全息光存储的存储容量;
2、本发明通过传感器检测存储介质相对光头的姿态误差,生成控制信号,并通过姿态调整平台的径向微动平台以及竖向微动平台伸缩移动,精准校准存储介质相对光头的姿态位置,无需移动光头,有效提高全息图的读写成功率。
附图说明
图1为全息光存储系统中的移位复用示意图。
图2为全息光存储系统中的交叉复用示意图。
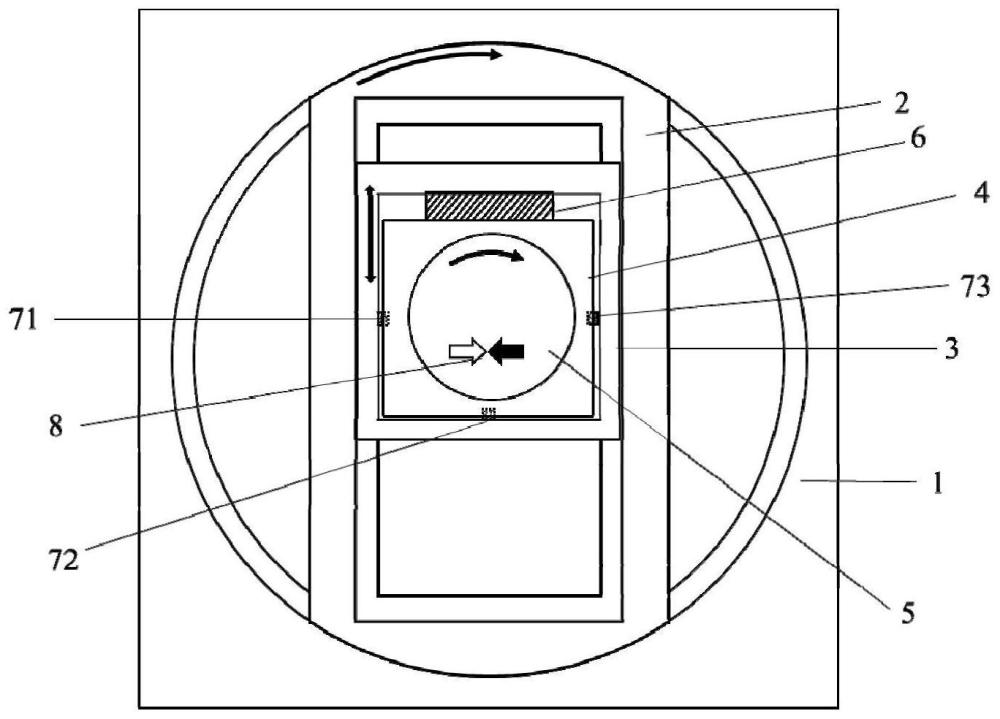
图3为全息光存储系统中的伺服平台的结构图。
图4为姿态调整平台的结构图及其局部坐标轴的示意图。
图5为自转平台的不同结构示意图,(1)为实施例1中自转平台的结构示意图,(2)为实施例2中自转平台的结构示意图,(3)为实施例3中自转平台的结构示意图。
图6为实施例5中在实现对焦和对存储介质倾斜的矫正时,传感器生成的控制信号的流向示意图。
附图标记说明:公转平台1,线性平移台2,姿态调整平台3,自转平台4,存储介质5,径向微动平台6,竖向微动平台71、72、73,光头8,全息图光栅9。
具体实施方式
本发明附图仅用于示例性说明,不能理解为对本发明的限制。为了更好说明以下实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
实施例1
如图3所示,本实施例提供一种全息光存储系统中的伺服平台,应用于全息光存储系统中,实现对存储介质姿态的调整,包括光头8、传感器、公转平台1、线性平移台2以及自转平台4;光头8用于输出读写光和伺服光;传感器用于检测存储介质5相对光头8的姿态误差,并生成控制信号;公转平台1、线性平移台2以及自转平台4相互连接,用于放置存储介质5以及带动存储介质5与光头8发生位置移动;还包括:姿态调整平台3,姿态调整平台3用于支撑放置存储介质5的平台,以及根据控制信号,对存储介质5相对光头8的位置和姿态进行调整。
进一步的,存储介质5放置于自转平台4上,自转平台4驱动存储介质5围绕自身中心进行自转;
自转平台4安装于姿态调整平台3中,姿态调整平台3根据控制信号,对自转平台4的姿态进行调整;
姿态调整平台3安装于线性平移台2中,线性平移台2带动姿态调整平台3沿公转圆直径方向进行平移;
线性平移台2安装于公转平台1中,公转平台1带动线性平移台2围绕光头8进行公转。
进一步的,姿态调整平台3用于实现自转平台4沿公转圆直径方向的精确径向平移,以及实现自转平台4沿垂直公转面方向的上下移动。
进一步的,姿态调整平台3还用于实现自转平台4围绕光头所在位置处光道的切线方向的倾斜转动,以及实现自转平台围绕光头所在位置处存储介质的径向方向的倾斜转动。
进一步的,如图4所示,姿态调整平台3为矩形框,自转平台4为矩形,设置于姿态调整平台3中间,自转平台4的三条侧边分别设置有可沿垂直公转面方向移动的竖向微动平台71、72、73,以实现自转平台4沿垂直公转面方向的上下移动、以及自转平台4围绕光头所在位置处光道的切线方向的倾斜转动,以及实现自转平台围绕光头所在位置处存储介质的径向方向的倾斜转动。自转平台4的剩余侧边设置有可沿公转圆直径方向移动的径向微动平台6,以实现自转平台4沿公转圆直径方向的径向平移。
本实施例中,如图4所示,以姿态调整平台3为中心建立局部坐标系,以姿态调整平台3移动方向,即公转圆直径方向为y轴,存储介质面内与y轴垂直的方向为x轴,即存储介质面内与其平移方向相垂直方向为x轴,以与公转面垂直的方向为z轴。
在全息光存储系统中,为实现更高的存储容量,需要对全息图进行复用记录,其中移位复用和交叉复用是最主要的复用方法。本实施例在进行存储介质5的读写过程中,光头8固定于公转平台1中心处,用于输出读写光与伺服光,进行存储介质5中全息图的记录或读取,存储介质5放置并固定于自转平台4上。转动线性平移台2,驱动存储介质5围绕光头8进行公转,可以设置所读写的全息图光栅9方向与光道切线的夹角,从而对交叉复用通道进行选择。而通过平移姿态调整平台3,驱动存储介质5沿公转圆直径方向进行平移,可以对光道进行选择,以实现在不同光道上进行全息图的读写;或者通过平移姿态调整平台3,驱动存储介质5沿公转圆直径方向进行平移,在沿存储介质5直径方向进行移位复用读写。自转平台4通过自转驱动结构驱动存储介质5围绕自身中心进行自转,可使光头8沿光道进行移位复用读写。而传感器用于检测存储介质5相对光头8的姿态误差,并生成控制信号,姿态调整平台3则根据对应的控制信号,对存储介质5姿态进行调整。存储介质5相对光头8的姿态误差,具体包括:光头8相对存储介质5的径向偏离误差、竖直方向偏离误差、存储介质的倾斜偏离误差,其中,径向为公转圆直径方向(附图4中的y轴方向),竖直方向为垂直公转面方向(z轴方向),倾斜偏离为存储介质与公转面平面的偏离,因此姿态调整平台3设置竖向微动平台71、72、73以及径向微动平台6进行上述各姿态的调整。当传感器检测到存储介质5姿态存在误差时,通过调整径向微动平台6的长度可矫正存储介质5沿径向的偏离;通过调整竖向微动平台71、72、73的长度,可以矫正存储介质5在竖直方向的偏离以及倾斜。
为了精准控制调整存储介质5的位置姿态,本实施例中,径向微动平台6数量为一个,与自转平台4的一条侧边相连,可沿公转圆直径方向(附图4中的y轴方向)上进行伸缩移动,从而在公转圆直径方向(附图4中的y轴方向)上对存储介质5的位置进行微调,而竖向微动平台数量为三个,分别与自转平台4剩下的三条侧边相连,三个竖向微动平台71、72、73可分别独立在与公转面垂直的方向(z轴方向)上进行伸缩移动,从而在与公转面垂直的方向(z轴方向)上微调存储介质的竖直位置以及倾斜状态。通过控制径向微动平台6与竖向微动平台71、72、73伸缩移动,可以实现全息光存储过程中的锁轨、对焦以及调整存储介质的倾斜角度的功能。其中,锁轨,具体操作为,控制径向微动平台6沿公转圆直径方向(附图4中的y轴方向)的伸缩移动,使存储介质在公转圆直径方向(附图4中的y轴方向)上产生微小径向平移,从而使光头8准确的对准光道,实现锁轨。对焦,具体操作为,控制竖向微动平台71、72、73沿垂直公转面方向(z轴方向)进行等量的伸缩移动,使存储介质5在垂直公转面方向(z轴方向)上下移动,从而调整读写光和伺服光的聚焦光斑在垂直公转面方向(z轴方向)上相对于存储介质5的位置,实现读写光和伺服光的精准对焦。调整光盘的倾斜角度,具体操作为,控制三个竖向微动平台71、72、73沿垂直公转面方向(z轴方向)进行不等量的伸缩移动,以调整存储介质在围绕光头所在位置处光道的切线方向(附图4中的x轴方向)和存储介质的径向方向(附图4中的y轴方向)两个方向上的倾斜角度,实现对存储介质5的倾斜姿态进行矫正,保证存储介质5位于恰当的平面内,从而确保全息存储信息的有效读写。
进一步的,如图5中的(1)所示,自转平台4为中空扁平结构,存储介质5放置于自转平台4的中空部分;
自转平台4中设有固定结构以及自转驱动结构,固定结构与自转驱动结构相连,固定结构用于从存储介质5的外沿固定存储介质,自转驱动结构用于从存储介质5的外沿驱动存储介质5围绕自身中心进行自转。
进一步的,公转平台1为中空扁平结构,线性平移台2安装于公转平台1的中空部分,光头8安装于公转平台1中心;
公转平台1包括公转驱动结构,公转驱动结构与线性平移台2相连,驱动线性平移台2围绕光头8进行公转。
进一步的,线性平移台2为中空扁平结构,姿态调整平台3安装于线性平移台2的中空部分;
线性平移台2包括平移驱动结构,平移驱动结构与姿态调整平台3相连,驱动姿态调整平台3沿公转圆直径方向进行平移。
进一步的,姿态调整平台3为中空扁平结构,自转平台4安装于姿态调整平台3的中空部分。
此外,本实施例中,径向微动平台6和竖向微动平台71、72、73可以具体为压电陶瓷或音圈电机,对其施加电压则可在特定方向上产生位移。
而存储介质5可以为中空或非中空的圆形全息光盘,其上有用于记录全息图的感光介质和用于定位的标记结构。
实施例2
本实施例与实施例1的结构基本相同,区别在于,如图5中的(2)所示,本实施例中,自转平台4中设有固定结构以及自转驱动结构,固定结构与自转驱动结构相连,固定结构用于从存储介质5的中心固定存储介质5,自转驱动结构用于从存储介质5的中心驱动存储介质5围绕自身中心进行自转。
进一步的,自转平台4的中空部分为一条侧边向内凹陷的矩形,固定结构位于矩形的向内凹陷的侧边的中心。存储介质5位于自转平台4上时,存储介质5的中心位于公转圆的直径上。
实施例3
本实施例与实施例2的结构基本相同,区别在于,如图5中的(3)所示,本实施例中,自转平台4的中空部分为两个长边相邻的矩形,自转平台4的非中空部分为两个长边相邻的矩形之间的横梁,固定结构位于自转平台4的非中空部分中心。
实施例4
本实施例提供一种交叉复用和移位复用的方法,使用如实施例1-3任一实施例中的伺服平台进行交叉复用和移位复用,包括以下步骤:
选择交叉复用通道,通过公转驱动结构驱动线性平移台2转动,以带动存储介质5围绕光头8进行公转,改变存储介质5上所记录的全息图的光栅9矢量相对于光道切线的夹角,对交叉复用通道进行设定;
选择光道,通过平移驱动结构驱动姿态调整平台3沿公转圆直径方向平移,以使光头8定位到所需光道;
沿光道进行移位复用,通过自转驱动结构驱动存储介质5进行自转,光头8沿存储介质5上的光道进行全息图的移位复用记录和读取。
实施例5
本实施例提供一种全息光存储系统中存储介质的伺服校准的方法,使用如实施例1-3任一实施例中的伺服平台进行存储介质的伺服校准,包括以下步骤:
传感器检测存储介质5相对光头8的姿态误差,并生成控制信号;
姿态调整平台3根据控制信号,对存储介质5相对所述光头8的姿态进行调整,所述调整包括:锁轨、对焦以及调整存储介质的倾斜角度;
锁轨,具体包括步骤:控制径向微动平台6沿公转圆径向(y轴方向)的伸缩移动,使存储介质5在公转圆径向(y轴方向)上产生微小径向平移,从而使光头8准确的对准光道,实现锁轨;
对焦,具体包括步骤:控制竖向微动平台71、72、73沿垂直公转面方向(z轴方向)进行等量的伸缩移动,使存储介质5在垂直公转面方向(z轴方向)上下移动,从而调整读写光和伺服光的聚焦光斑在垂直公转面方向(z轴方向)上相对于存储介质5的位置,实现读写光和伺服光的精准对焦;
调整存储介质5的倾斜角度,具体包括步骤:控制三个竖向微动平台71、72、73沿垂直公转面方向(z轴方向)进行不等量的伸缩移动,以调整存储介质在围绕x轴方向和围绕公转圆直径方向(y轴方向)两个方向上的倾斜角度Δθx和Δθy,实现对存储介质的倾斜姿态进行矫正,保证存储介质5位于恰当的平面内,从而确保全息存储信息的有效读写。例如缩短竖向微动平台71的长度,伸长竖向微动平台73的长度,可以使存储介质5围绕公转圆直径方向(y轴方向)旋转一定的角度;同时等量伸长竖向微动平台71和73的长度,缩短竖向微动平台72的长度,可以使存储介质5围绕x轴方向旋转一定的角度。
如图6所示,全息光存储系统中的伺服平台中的传感器,在实现对焦和对存储介质倾斜的矫正时,首先检测存储介质5围绕x轴方向和围绕公转圆直径方向(y轴方向)两个方向上的倾斜角度Δθx和Δθy,以及在垂直公转面方向(z轴方向)偏离Δz,产生对应的围绕x轴的旋转误差信号、围绕y轴的旋转误差信号和对焦误差信号,通过对该三项误差信号进行综合信号处理并输出控制三个竖向微动平台71、72、73伸缩移动的控制信号,使得三个竖向微动平台71、72、73分别产生大小为z1、z2、z3的位移,从而同时实现对焦以及对存储介质光盘的倾斜的矫正。
显然,本发明的上述实施例仅仅是为清楚地说明本发明技术方案所作的举例,而并非是对本发明的具体实施方式的限定。凡在本发明权利要求书的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。