一种通信链路不稳定的无人机编队鲁棒控制方法及系统
文献发布时间:2024-04-18 19:48:15
技术领域
本发明属于无人机集群控制的技术领域,尤其涉及一种通信链路不稳定的无人机编队鲁棒控制方法及系统。
背景技术
近年来,随着科学技术的快速发展,无人机技术已在民用和军用领域发挥重大作用。然而,单架无人机受到自身、任务以及环境等因素限制,其作用存在一定的瓶颈。为了满足未来复杂任务和恶劣环境带来的挑战,无人机协同编队具有更强的环境适应性和鲁棒性,能够很好地弥补单架无人机性能缺陷,因此受到了广泛的研究与探讨。
对于无人机编队来说,编队成员之间需要相互通信,获取相对位置状态信息。然而,由于机载设备、成员空间分布、复杂任务环境影响,编队成员之间的信息交互面临严重的干扰影响,造成机间通信链路不稳定,信息交互不畅通,严重影响编队协同稳定性和安全性。
目前,一些专利文献已提出了无人机编队控制方法,如:中国专利CN114995521B公开了一种多无人机分布式编队控制方法。中国专利CN113342033B公开了一种基于固定时间技术的无人机姿态同步容错控制方法,然而上述两个专利中,编队成员之间的信息交互都是理想的,没有考虑通信干扰造成的通信链路不确定性影响。中国专利CN111708376B公开了一种对通信链路具有鲁棒性的固定翼无人机编队控制方法,然而该专利中,所设计的控制系统是集中式的,当无人机编队数量较多时,上述控制方法运算量迅速增大,严重影响编队性能。
发明内容
鉴于上述问题,本发明公开了一种通信链路不稳定的无人机编队鲁棒控制系统及控制方法,用以解决现有技术中的无人机集群受到通信链路不稳定和集中式运算量大的问题。
一方面,本发明提供了一种通信链路不稳定的无人机编队鲁棒控制方法,包括以下步骤:
步骤一、建立无人机编队的有向通讯链路并确定编队中心:
无人机编队的有向通讯链路表示为:
其中,
惯性坐标系中,编队中心的位置坐标为
无人机节点
邻居无人机节点
步骤二、建立电磁干扰影响下的无人机编队通信链路权重系数不确定模型:
其中,
步骤三、建立无人机集群编队的运动模型;
步骤四、根据步骤三中的无人机节点的运动模型,建立理想通信链路条件下的无人机节点的位置控制律;
步骤五、根据步骤四中的位置控制律,建立通信链路不稳定对无人机编队造成的影响,得到无人机节点受到的通信链路干扰影响;
步骤六、根据步骤三中的无人机集群编队的运动模型和步骤五中的通信链路干扰影响,建立通信链路干扰抑制控制律;
步骤七、将步骤四中无人机节点理想通信链路条件下控制律和步骤六的无人机节点干扰抑制律相结合,组成鲁棒控制律。
可选地,步骤三中的无人机集群编队的运动模型为:
其中,
可选地,步骤四中的理想通信链路条件下的无人机节点的位置控制律的表达式为:
其中,
可选地,步骤五中的得到无人机节点受到的通信链路干扰影响,表达式为:
其中,
可选地,步骤六中的无人机干扰抑制律为:
其中,
其中,
其中,
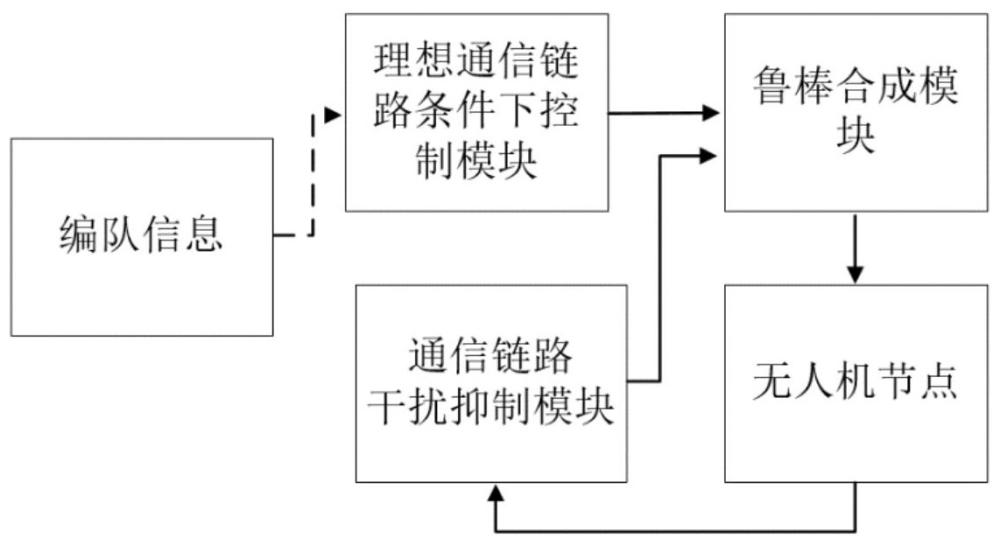
本发明另一个方面,提供了一种通信链路不稳定的无人机编队鲁棒控制系统,使用前述的控制方法对无人机集群进行通信链路不稳定的编队控制,包括理想通信链路条件下控制律模块、通信链路干扰抑制模块、鲁棒合成模块;
理想通信链路条件下控制律模块,用于控制无干扰条件下无人机编队协同飞行;
通信链路干扰抑制模块,用于抑制通信链路不稳定干扰、外界复杂干扰影响;
鲁棒合成模块,用于对理想通信链路条件下控制律模块控制输入和干扰抑制模块控制输入求和。
与现有技术相比,本发明至少可实现如下有益效果之一:
(1)本发明的方法通过结合图论方法,设计了一种通信链路不稳定的鲁棒编队控制律,通过对链路不稳定影响进行补偿,获得期望的稳定链路,从而实现无人机编队飞行,解决了传统控制方法受到的编队通信链路不稳定和编队控制效率低的问题。
(2)本发明的通信链路干扰抑制模块,能够抑制外界环境对通信链路不稳定造成的影响,安全稳定完成期望的编队任务。
(3)本发明的方法能够有效抑制无人机编队协同系统受到的外部干扰和模型不匹配问题,具有较好的鲁棒性,可以实现期望的编队协同性能。
(4)本发明的方法复杂度低,易于实现。
附图说明
图1是2架无人机在惯性坐标系和本体坐标系下示意图;
图2是本发明无人机集群编队控制系统的结构示意图;
图3是本发明的实施例中4架无人机集群编队通信链路结构图;
图4是本发明的实施例中4架无人机飞行时的三维飞行轨迹;
具体实施方式
下面结合附图和具体实施例,对本发明进行详细描述。
在本发明中,为了实现对无人机节点的状态表征,使用惯性坐标系
其中,惯性坐标系
本发明的一个实施例,如图1-图4,公开了一种通信链路不稳定的无人机编队鲁棒控制方法,包括以下步骤:
步骤一、建立无人机编队的有向通讯链路并确定编队中心:
无人机编队的有向通讯链路表示为:
其中,
如图1所示,无人机节点
z
由此,无人机节点
z
如果无人机编队的有向通讯链路中存在一个无人机节点使得该无人机节点到其他所有的无人机节点都有路径,则有向图通讯链路
在发明中,无人机编队的根节点为无人机编队的中心,即:无人机编队的中心节点;该编队中心在惯性坐标系中的位置为
可以理解的是,编队成员为参与编队的所有无人机节点中除了编队中心的其他无人机节点。
步骤二、建立电磁干扰影响下的无人机编队通信链路权重系数不确定模型:
实际任务中,由于机载设备、成员空间分布、复杂任务环境影响,编队成员之间的信息交互面临严重的干扰影响,造成机间通信链路不稳定。本发明中,将无人机编队通信链路的不稳定状态表征为通信的权重系数
其中,
可以理解的是,无人机节点
无人机编队在执行复杂任务时,会受到空间中电磁环境干扰影响,导致通信链路耦合权重系数产生不确定性,本发明用
步骤三、建立无人机集群编队的运动模型:
其中,
步骤四、根据步骤三中的无人机节点的运动模型,建立理想通信链路条件下的无人机节点
无人机节点
其中,
步骤五、根据步骤四中的位置控制律,建立通信链路不稳定对无人机编队造成的影响,得到无人机节点
其中,
可以理解的,从而步骤五可知,通信链路不确定性会通过整个通信链路影响无人机节点
步骤六、根据步骤三中的无人机集群编队的运动模型和步骤五中的通信链路干扰影响,建立无人机节点的通信链路干扰抑制控制律。
其中,
其中,
其中,
步骤七、将步骤四中无人机节点
本发明的另一个具体实施例,如图2,公开了一种通信链路不稳定的无人机编队鲁棒控制系统,使用前述控制方法对无人机集群进行通信链路不稳定的编队控制,包括理想通信链路条件下控制律模块、通信链路干扰抑制模块、鲁棒合成模块;
理想通信链路条件下控制律模块,用于控制无干扰条件下无人机编队协同飞行;
通信链路干扰抑制模块,用于抑制通信链路不稳定干扰、外界复杂干扰影响;
鲁棒合成模块,用于对理想通信链路条件下控制律模块控制输入和干扰抑制模块控制输入求和。
为了便于理解本发明,下面举例详细阐述本发明方法,但是本发明还可以应用于其他不同于此实施例来实施,因此,本发明保护范围不限于下述实例。
在本实施案例中,对4架无人机组成的集群进行编队控制。该4架无人机在执行任务时,按照前述通信链路不稳定的无人机编队控制方法进行编队控制,根据步骤一中所建立的通讯链路如图3所示。设置编队中心飞行轨迹为
根据步骤二建立干扰影响下的无人机编队通信链路权重系数不确定模型;设置链路不确定模型如下:
设置无人机模型参数如下:
设置理想通信链路条件下控制律参数,得到理想通信链路条件下控制律
结合通信链路权重系数不确定模型和外界干扰,得到系统受到总干扰影响。
设置无人机干扰抑制控制律参数矩阵:
将理想通信链路条件下控制律
仿真结果分析,从图4可以看出,本发明能够使无人机集群编队实现较好的协同。此外,还能够有效抑制系统模型未知和外界干扰的影响,具有很好的鲁棒性。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。