一种非接触式鼻咽检测机器人
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及医学辅助设备技术领域,具体为一种非接触式鼻咽检测机器人。
背景技术
新冠病毒核酸检测结果是新型冠状病毒肺炎诊断和疗效评价的重要参考,核酸检测筛查标本多来源于深咳痰液或者咽拭子,而咽拭子分为鼻咽拭子和口咽拭子。由于口咽拭子张口就能进行操作,相对简单,因此临床上比较常用,但这一操作也是一个高风险操作,取样者暴露的风险更高,操作者往往需要正对患者口腔,采集过程中患者容易出现刺激性干咳、呕吐等症状使采集者暴露在带病毒的气溶胶中。因此,在实际操作时更多采用的是鼻咽拭子。
但是即便采用鼻咽拭子,由于本质上仍然是人工检测,对医护人员和被检测对象都不友好。医护人员还是存在较高的被传染概率,同时被检测者的鼻腔要被一根长棉签用力向内旋转,少数人会流血,棉签进太深,个别被检对象的棉签也不易取样后退出。
综上所述,目前所采用的鼻咽拭子测试的方法,存在着医护人员容易被感染,当病人患有较强的传染性疾病时,医护人员的生命安全收到了很大的威胁,且目前的鼻咽拭子测试方法,会产生被检测者的舒适程度较差的问题,甚至导致被检测者的内表皮损伤的问题。
发明内容
本发明的目的在于提供一种非接触式鼻咽检测机器人,解决了现有鼻咽拭子检测中存在的问题。
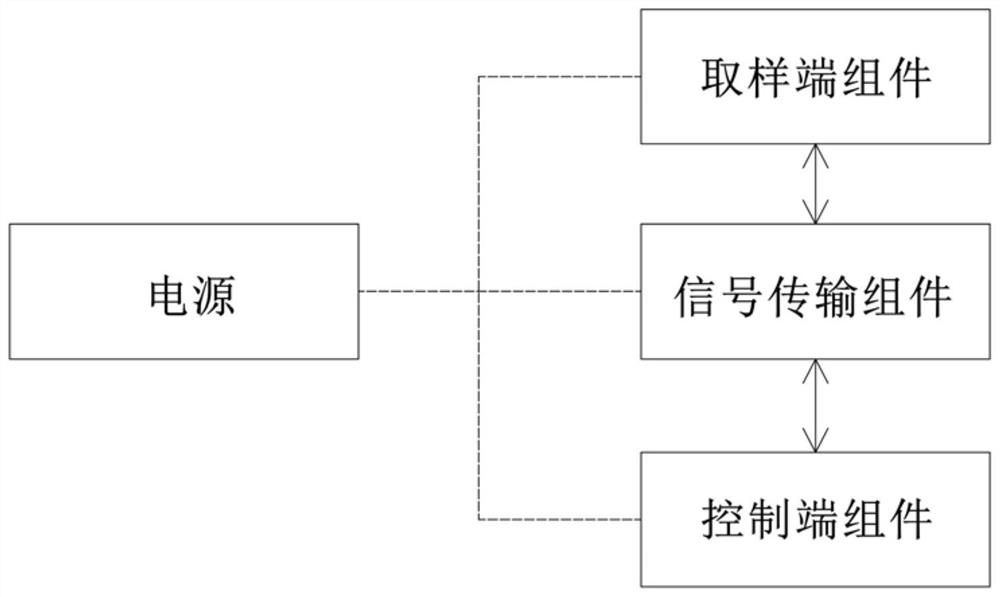
为实现上述目的,本发明提供如下技术方案:一种非接触式鼻咽检测机器人,包括取样端组件、信号传输组件、控制端组件以及电源,所述取样端组件用于接收信号,以及自动鼻咽拭子采样的动作,所述信号传输组件用于完成取样端组件与控制端组件的信号实时双向传输工作,所述控制端组件用于发送鼻咽拭子采样的指令,并控制取样端组件进行采样工作,所述电源用于取样端组件、信号传输组件以及控制端组件的能源供应。
优选的,所述取样端组件包括取样卧床、运动控制部件、图像采集部件、取样部件以及自动消毒部件,所述取样卧床包括卧床主体以及头部固定装置,用于病人的躺卧以及头部的固定,所述运动控制部件包括六自由度机械手与六维力传感器,所述六维力传感器用于实时感知取样工作中,取样部件与咽部组织的接触力,所述图像采集部件,包括内窥镜、彩色摄像头以及医用X光显影机,所述内窥镜用于观察患者咽喉位置的高清3D解剖情景,内窥镜位于六自由度机械手前端,所述彩色摄像头位于患者取样卧床头部固定装置的上方,用于拍摄患者面部影像,方便医护人员控制取样部件进入患者鼻腔内,所述医用X光显影机位于患者头部位置一侧,所述取样部件包括挠性取样管与取样拭子,所述取样拭子位于挠性取样管前端,并包裹在挠性取样管前部位置,所述自动消毒部件包括紫外线消毒装置以及喷洒消毒装置,所述紫外线消毒装置安装在取样卧床上方,所述喷洒消毒装置安装在取样卧床两侧。
优选的,所述信号传输组件包括有线通讯装置和无线通讯装置,所述有线通讯装置采用同轴电缆、双绞线或光纤,有线通讯装置的带宽不小于1000M,所述有线通讯装置采用总线或以太网进行信息传输与控制指令的发出,所述无线通讯装置采用2.4G/5G双频网络。
优选的,所述控制端组件包括显示器,上位机,机器人运动控制卡以及指令输入设备,所述显示器采用IPS显示屏,分辨率不低于1920×1080,所述上位机采用PC机或医疗器械控制板,所述PC机或医疗器械控制板的内存空间不小于2G,硬盘空间不小于128G,并配备独立显卡,所述指令输入设备包括键盘,鼠标,所述上位机用于接收来自取样端组件中采集的信息,并将信息显示在显示器上,所述指令设备通过输入运动指令,并经由上位机发送至机器人运动控制卡,使机械臂按照指令进行运动。
优选的,所述头部固定装置采用松紧带或头部固定器,采用松紧带固定时,需要将松紧带固定在取样卧床的床头两端位置,采用头部固定器固定时,将头部固定器固定在取样卧床的床头中心位置。
优选的,所述控制端组件中的上位机安装有Windows或Linux系统,并安装有与机器人运动控制卡相配套的机器人动作控制程序,所述控制端组件中的指令输入设备包括鼠标、键盘。
优选的,所述有线通讯装置采用总线进行传输时,总线采用SPI总线和I2C总线,所述SPI总线用于六自由度机械手的前后移动,所述I2C总线用于六自由度机械手的上下左右移动。
优选的,所述挠性取样管采用PVC护套防爆挠性取样管或塑料防爆挠性取样管,所述取样拭子采用普通消毒棉或带有明胶的消毒棉。
优选的,所述内窥镜采用纤维内窥镜、电子内窥镜或双目内窥镜,所述彩色摄像头分辨率不低于1080P。。
与现有技术相比,本发明的有益效果如下:
1、本发明采用机器对患者进行鼻咽拭子采样,确保了医护人员与被取样人员的隔离,可以极大的保护医生不被感染,适合大规模推广应用;
2、通过采用六维力传感器,实时检测鼻咽拭子对患者咽部组织的接触力,当接触力较大时及时予以提醒,避免在人工取样中出现的由于取样人员用力过大导致的患者不舒适,甚至流血的问题;
3、通过采用有线、无线并用的通信方式,并采用因特网和总线的通讯方法,实现医护人员对于鼻咽拭子取样的实时监控,通过采用六自由度机械手,实现了对患者的精准取样;
4、通过设置自动消毒部件,在每位患者采样后对装置进行消毒,可以极大的避免后来患者的交叉感染,并保障医护工作人员的健康安全。
附图说明
图1为一种非接触式鼻咽检测机器人总体示意图;
图2为该非接触式鼻咽检测机器人取样端组件示意图;
图3为该非接触式鼻咽检测机器人信号传输组件示意图;
图4为该非接触式鼻咽检测机器人控制端组件示意图;
图5为该非接触式鼻咽检测机器人取样端组件俯视示意图;
图6为六自由度机械手示意图;
图7为患者坐姿检测时该装置工作示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,除非另有说明,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶部”、“底部”等指示的方位或状态关系为基于附图所示的方位或状态关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的机构或部件必须具有的特定方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上.述术语在本发明中的具体含义。
本发明为一种非接触式鼻咽检测机器人,根据附图说明所示讲述以下实施例:
实施例1:
请参阅图1-6,一种非接触式鼻咽检测机器人,包括取样端组件、信号传输组件、控制端组件以及电源,所述取样端组件用于接收信号,以及自动鼻咽拭子采样的动作,所述信号传输组件用于完成取样端组件与控制端组件的信号实时双向传输工作,所述控制端组件用于发送鼻咽拭子采样的指令,并控制取样端组件进行采样工作,所述电源用于取样端组件、信号传输组件以及控制端组件的能源供应;
本实施例中,所述取样端组件包括取样卧床、运动控制部件、图像采集部件、取样部件以及自动消毒部件,所述取样卧床包括卧床主体以及头部固定装置,用于病人的躺卧以及头部的固定,所述运动控制部件包括六自由度机械手与六维力传感器,所述六维力传感器用于实时感知取样工作中,取样部件与咽部组织的接触力,所述图像采集部件,包括内窥镜、彩色摄像头以及医用X光显影机,所述内窥镜用于观察患者咽喉位置的高清3D解剖情景,内窥镜位于六自由度机械手前端,所述彩色摄像头位于患者取样卧床头部固定装置的上方,用于拍摄患者面部影像,方便医护人员控制取样部件进入患者鼻腔内,所述医用X光显影机位于患者头部位置一侧,所述取样部件包括挠性取样管与取样拭子,所述取样拭子位于挠性取样管前端,并包裹在挠性取样管前部位置,所述自动消毒部件包括紫外线消毒装置以及喷洒消毒装置,所述紫外线消毒装置安装在取样卧床上方,所述喷洒消毒装置安装在取样卧床两侧。
本实施例中,所述信号传输组件包括有线通讯装置和无线通讯装置,所述有线通讯装置采用同轴电缆、双绞线或光纤,有线通讯装置的带宽不小于1000M,所述有线通讯装置采用总线或以太网进行信息传输与控制指令的发出,所述无线通讯装置采用2.4G/5G双频网络。
本实施例中,所述控制端组件包括显示器,上位机,机器人运动控制卡以及指令输入设备,所述显示器采用IPS显示屏,分辨率不低于1920×1080,所述上位机采用PC机或医疗器械控制板,所述PC机或医疗器械控制板的内存空间不小于2G,硬盘空间不小于128G,并配备独立显卡,所述指令输入设备包括键盘,鼠标,所述上位机用于接收来自取样端组件中采集的信息,并将信息显示在显示器上,所述指令设备通过输入运动指令,并经由上位机发送至机器人运动控制卡,使机械臂按照指令进行运动。
本实施例中,所述头部固定装置采用松紧带或头部固定器,采用松紧带固定时,需要将松紧带固定在取样卧床的床头两端位置,采用头部固定器固定时,将头部固定器固定在取样卧床的床头中心位置。
本实施例中,所述控制端组件中的上位机安装有Windows或Linux系统,并安装有与机器人运动控制卡相配套的机器人动作控制程序,所述控制端组件中的指令输入设备包括鼠标、键盘。
本实施例中,所述有线通讯装置采用总线进行传输时,总线采用SPI总线和I2C总线,所述SPI总线用于六自由度机械手的前后移动,所述I2C总线用于六自由度机械手的上下左右移动。
本实施例中,所述挠性取样管采用PVC护套防爆挠性取样管或塑料防爆挠性取样管,所述取样拭子采用普通消毒棉或带有明胶的消毒棉。
本实施例中,所述内窥镜采用纤维内窥镜、电子内窥镜或双目内窥镜,所述彩色摄像头分辨率不低于1080P。
本实施例中,所述电源采用外接电网供电以及蓄电池供电,在外接电网时供电时,同时为蓄电池充电,当在外接电网时断电时,仅采用蓄电池充电,外接电网供电以及蓄电池供电电压为220V。
本实施例的工作方法如下:
在本装置进行工作时,首先由医护人员将取样部件固定至机械手前端后,离开取样室,而后病人进入取样室中,并躺在取样卧床上,将病人的头部使用头部固定装置进行固定,随后彩色摄像机与内窥镜启动,内窥镜与取样部件紧邻,并确保内窥镜镜头可以观测到取样拭子及其前部画面,彩色摄像机在病人面部上方,内窥镜与彩色摄像头的画面通过信号传输部件传入控制端组件,并由控制端组件中的上位机将图像实时显示在显示器中,医护人员通过显示器可以清晰的观测到挠性取样管和取样拭子与患者的相对距离,医护人员通过指令输入设备向上位机中机器人动作控制程序中输入六自由度机械手的运动指令,而后由上位机发送至机器人运动控制卡,并由机器人运动控制卡控制六自由度机械手进行操作运动;在取样部件进入患者鼻腔之前时,采用彩色摄像机以及内窥镜的图像来帮助医护人员发送指令操作六自由度机械手将取样部件移入患者鼻腔,在取样部件进入患者鼻腔后,采用内窥镜图像控制取样部件的深入直至到达鼻咽位置,并在鼻咽处通过六自由度机械手将取样部件进行旋转,从而进行取样,若内窥镜观测效果不佳,开启医用X光显影机进行辅助观测,确保在取样部件深入过程中,不伤及患者;通过设置在六自由度机械手上的六维力传感器及时感知取样部件与患者咽部组织接触力的大小并将接触力大小通过信号传输组件传输至控制端组件中的显示器,当六维力传感器检测到取样部件与患者咽部组织接触力较大时,上位机控制显示器对医护人员进行提示报警,提醒医护人员继续操作可能会使患者受伤,从而提醒医护人员及时调整六自由度机械手的动作,保障患者的安全,待取样结束后,医护人员通过发送指令控制六自由度机械手将取样部件取出,而后患者解下头部固定装置,即可离开,随后,由医护人员进入取样室取下取样部件,并安装新的取样部件,最后,由紫外线消毒装置对机械手及卧床进行消毒,位于取样卧床两侧的喷洒消毒装置,喷洒消毒液对取样室进行消毒,从而完成取样工作。在取样过程中,对于信息的传递采用有线通讯方式与无线通讯方式并行进行,并采用高速的传输技术,确保控制端部件可以实时的接收到来自内窥镜、彩色摄像头、医用X光显影机以及六维力传感器的信息大大的降低延迟,减少医疗事故,同时也可以实时操控六自由度机械手,快速准确的完成采样工作;通过采用外接电网以及蓄电池的联合供电方法,可以保证在外接电网断电时对患者进行及时的取样工作,提高了设备的可靠性以及可用性。
实施例2:
请参阅图1-6,一种非接触式鼻咽检测机器人,包括取样端组件、信号传输组件、控制端组件以及电源,所述取样端组件用于接收信号,以及自动鼻咽拭子采样的动作,所述信号传输组件用于完成取样端组件与控制端组件的信号实时双向传输工作,所述控制端组件用于发送鼻咽拭子采样的指令,并控制取样端组件进行采样工作,所述电源用于取样端组件、信号传输组件以及控制端组件的能源供应;
本实施例中,所述取样端组件包括取样卧床、运动控制部件、图像采集部件、取样部件以及自动消毒部件,所述取样卧床包括卧床主体以及头部固定装置,用于病人的躺卧以及头部的固定,所述运动控制部件包括六自由度机械手与六维力传感器,所述六维力传感器用于实时感知取样工作中,取样部件与咽部组织的接触力,所述图像采集部件,包括内窥镜、彩色摄像头以及医用X光显影机,所述内窥镜用于观察患者咽喉位置的高清3D解剖情景,内窥镜位于六自由度机械手前端,所述彩色摄像头位于患者取样卧床头部固定装置的上方,用于拍摄患者面部影像,方便医护人员控制取样部件进入患者鼻腔内,所述医用X光显影机位于患者头部位置一侧,所述取样部件包括挠性取样管与取样拭子,所述取样拭子位于挠性取样管前端,并包裹在挠性取样管前部位置,所述自动消毒部件包括紫外线消毒装置以及喷洒消毒装置,所述紫外线消毒装置安装在取样卧床上方,所述喷洒消毒装置安装在取样卧床两侧。
本实施例中,所述信号传输组件包括有线通讯装置和无线通讯装置,所述有线通讯装置采用光纤,所述有线通讯装置采用总线进行信息传输与控制指令的发出,所述无线通讯装置采用2.4G/5G双频网络。
本实施例中,所述控制端组件包括显示器,上位机,机器人运动控制卡以及指令输入设备,所述显示器采用IPS显示屏,分辨率不低于1920×1080,所述上位机采用戴尔Vostro 3671-R19N8R的PC机,所述指令输入设备包括键盘,鼠标,所述上位机用于接收来自取样端组件中采集的信息,并将信息显示在显示器上,所述指令设备通过输入运动指令,并经由上位机发送至机器人运动控制卡,使机械臂按照指令进行运动。
本实施例中,所述头部固定装置采用松紧带,将松紧带固定在取样卧床的床头两端位置。
本实施例中,所述控制端组件中的上位机安装有Windows系统,并安装有与机器人运动控制卡相配套的机器人动作控制程序,所述控制端组件中的指令输入设备包括鼠标、键盘。
本实施例中,所述有线通讯装置采用总线进行传输时,总线采用SPI总线和I2C总线,所述SPI总线用于六自由度机械手的前后移动,所述I2C总线用于六自由度机械手的上下左右移动。
本实施例中,所述挠性取样管采用PVC护套防爆挠性取样管,所述取样拭子采用普通消毒棉。
本实施例中,所述内窥镜采用双目内窥镜,所述彩色摄像头分辨率为4K。
本实施例中,所述电源采用外接电网供电以及蓄电池供电,在外接电网时供电时,同时为蓄电池充电,当在外接电网时断电时,仅采用蓄电池充电,外接电网供电以及蓄电池供电电压为220V。
本实施例的工作方法如下:
在本装置进行工作时,首先由医护人员将取样部件固定至机械手前端后,离开取样室,而后病人进入取样室中,并躺在取样卧床上,将病人的头部采用松紧带进行固定,随后彩色摄像机与双目内窥镜启动,双目内窥镜与取样部件紧邻,并确保内窥镜镜头可以观测到取样拭子及其前部画面,彩色摄像机在病人面部上方,内窥镜与彩色摄像头的画面通过信号传输部件传入控制端组件,并由控制端组件中的戴尔Vostro 3671-R19N8R型号PC机将图像实时显示在显示器中,医护人员通过显示器可以清晰的观测到挠性取样管和取样拭子与患者的相对距离,医护人员通过指令输入设备向戴尔Vostro3671-R19N8R型号PC机中机器人动作控制程序中输入六自由度机械手的运动指令,而后由戴尔Vostro 3671-R19N8R型号PC机发送至机器人运动控制卡,并由机器人运动控制卡控制六自由度机械手进行操作运动;在取样部件进入患者鼻腔之前时,采用彩色摄像机以及内窥镜的图像来帮助医护人员发送指令操作六自由度机械手将取样部件移入患者鼻腔,在取样部件进入患者鼻腔后,采用内窥镜图像控制取样部件的深入直至到达鼻咽位置,并在鼻咽处通过六自由度机械手将取样部件进行旋转,从而进行取样,若内窥镜观测效果不佳,开启医用X光显影机进行辅助观测,确保在取样部件深入过程中,不伤及患者;通过设置在六自由度机械手上的六维力传感器及时感知取样部件与患者咽部组织接触力的大小并将接触力大小通过信号传输组件传输至控制端组件中的显示器,当六维力传感器检测到取样部件与患者咽部组织接触力较大时,戴尔Vostro 3671-R19N8R型号PC机控制显示器对医护人员进行提示报警,提醒医护人员继续操作可能会使患者受伤,从而提醒医护人员及时调整六自由度机械手的动作,保障患者的安全,待取样结束后,医护人员通过发送指令控制六自由度机械手将取样部件取出,而后患者解下头部固定装置,即可离开,随后,由医护人员进入取样室取下取样部件,并安装新的取样部件,最后,由紫外线消毒装置对机械手及卧床进行消毒,位于取样卧床两侧的喷洒消毒装置,喷洒消毒液对取样室进行消毒,喷洒的消毒液采用84消毒液,从而完成取样工作。在取样过程中,对于信息的传递采用有线通讯方式与无线通讯方式并行进行,并采用高速的传输技术,确保控制端部件可以实时的接收到来自内窥镜、彩色摄像头、医用X光显影机以及六维力传感器的信息大大的降低延迟,减少医疗事故,同时也可以实时操控六自由度机械手,快速准确的完成采样工作;通过采用外接电网以及蓄电池的联合供电方法,可以保证在外接电网断电时对患者进行及时的取样工作,提高了设备的可靠性以及可用性。
实施例3:
请参阅图1-6,一种非接触式鼻咽检测机器人,包括取样端组件、信号传输组件、控制端组件以及电源,所述取样端组件用于接收信号,以及自动鼻咽拭子采样的动作,所述信号传输组件用于完成取样端组件与控制端组件的信号实时双向传输工作,所述控制端组件用于发送鼻咽拭子采样的指令,并控制取样端组件进行采样工作,所述电源用于取样端组件、信号传输组件以及控制端组件的能源供应;
本实施例中,所述取样端组件包括取样卧床、运动控制部件、图像采集部件、取样部件以及自动消毒部件,所述取样卧床包括卧床主体以及头部固定装置,用于病人的躺卧以及头部的固定,所述运动控制部件包括六自由度机械手与六维力传感器,所述六维力传感器用于实时感知取样工作中,取样部件与咽部组织的接触力,所述图像采集部件,包括内窥镜、彩色摄像头以及医用X光显影机,所述内窥镜用于观察患者咽喉位置的高清3D解剖情景,内窥镜位于六自由度机械手前端,所述彩色摄像头位于患者取样卧床头部固定装置的上方,用于拍摄患者面部影像,方便医护人员控制取样部件进入患者鼻腔内,所述医用X光显影机位于患者头部位置一侧,所述取样部件包括挠性取样管与取样拭子,所述取样拭子位于挠性取样管前端,并包裹在挠性取样管前部位置,所述自动消毒部件包括紫外线消毒装置以及喷洒消毒装置,所述紫外线消毒装置安装在取样卧床上方,所述喷洒消毒装置安装在取样卧床两侧。
本实施例中,所述信号传输组件包括有线通讯装置和无线通讯装置,所述有线通讯装置采用同轴电缆,有线通讯装置的带宽不小于1000M,所述有线通讯装置采用以太网进行信息传输与控制指令的发出,所述无线通讯装置采用2.4G/5G双频网络。
本实施例中,所述控制端组件包括显示器,上位机,机器人运动控制卡以及指令输入设备,所述显示器采用IPS显示屏,分辨率不低于1920×1080,所述上位机采用联想-GeekPro型号PC机,所述指令输入设备包括键盘,鼠标,所述上位机用于接收来自取样端组件中采集的信息,并将信息显示在显示器上,所述指令设备通过输入运动指令,并经由上位机发送至机器人运动控制卡,使机械臂按照指令进行运动。
本实施例中,所述头部固定装置采用头部固定器,在进行头部固定时,将头部固定器固定在取样卧床的床头中心位置。
本实施例中,所述控制端组件中的上位机安装有Linux系统,并安装有与机器人运动控制卡相配套的机器人动作控制程序,所述控制端组件中的指令输入设备包括鼠标、键盘。
本实施例中,所述有线通讯装置采用总线进行传输时,总线采用SPI总线和I2C总线,所述SPI总线用于六自由度机械手的前后移动,所述I2C总线用于六自由度机械手的上下左右移动。
本实施例中,所述挠性取样管采用塑料防爆挠性取样管,所述取样拭子采用带有明胶的消毒棉,以提高取样效果。
本实施例中,所述内窥镜采用电子内窥镜,所述彩色摄像头分辨率不低于1080P。
本实施例中,所述电源采用外接电网供电以及蓄电池供电,在外接电网时供电时,同时为蓄电池充电,当在外接电网时断电时,仅采用蓄电池充电,外接电网供电以及蓄电池供电电压为220V。
在本装置进行工作时,首先由医护人员将取样部件固定至机械手前端后,离开取样室,而后病人进入取样室中,并躺在取样卧床上,将病人的头部使用头部固定器进行固定,随后彩色摄像机与电子内窥镜启动,内窥镜与取样部件紧邻,并确保内窥镜镜头可以观测到取样拭子及其前部画面,彩色摄像机在病人面部上方,内窥镜与彩色摄像头的画面通过信号传输部件传入控制端组件,并由控制端组件中的联想-GeekPro型号PC机将图像实时显示在显示器中,医护人员通过显示器可以清晰的观测到挠性取样管和取样拭子与患者的相对距离,医护人员通过指令输入设备向联想-GeekPro型号PC机中机器人动作控制程序中输入六自由度机械手的运动指令,而后由联想-GeekPro型号PC机发送至机器人运动控制卡,并由机器人运动控制卡控制六自由度机械手进行操作运动;在取样部件进入患者鼻腔之前时,采用彩色摄像机以及内窥镜的图像来帮助医护人员发送指令操作六自由度机械手将取样部件移入患者鼻腔,在取样部件进入患者鼻腔后,采用内窥镜图像控制取样部件的深入直至到达鼻咽位置,并在鼻咽处通过六自由度机械手将取样部件进行旋转,从而进行取样,若内窥镜观测效果不佳,开启医用X光显影机进行辅助观测,确保在取样部件深入过程中,不伤及患者;通过设置在六自由度机械手上的六维力传感器及时感知取样部件与患者咽部组织接触力的大小并将接触力大小通过信号传输组件传输至控制端组件中的显示器,当六维力传感器检测到取样部件与患者咽部组织接触力较大时,联想-GeekPro型号PC机控制显示器对医护人员进行提示报警,提醒医护人员继续操作可能会使患者受伤,从而提醒医护人员及时调整六自由度机械手的动作,保障患者的安全,待取样结束后,医护人员通过发送指令控制六自由度机械手将取样部件取出,而后患者解下头部固定装置,即可离开,随后,由医护人员进入取样室取下取样部件,并安装新的取样部件,最后,由紫外线消毒装置对机械手及卧床进行消毒,位于取样卧床两侧的喷洒消毒装置,喷洒消毒液对取样室进行消毒,喷洒消毒液为双氧水,从而完成取样工作。在取样过程中,对于信息的传递采用有线通讯方式与无线通讯方式并行进行,并采用高速的传输技术,确保控制端部件可以实时的接收到来自电子内窥镜、彩色摄像头、医用X光显影机以及六维力传感器的信息大大的降低延迟,减少医疗事故,同时也可以实时操控六自由度机械手,快速准确的完成采样工作;通过采用外接电网以及蓄电池的联合供电方法,可以保证在外接电网断电时对患者进行及时的取样工作,提高了设备的可靠性以及可用性。
实施例4:
请参阅图1-7,本实施例提供一种非接触式鼻咽检测机器人,在实施例1-3的基础上,进一步公开采用坐姿检测时的方案,包括取样端组件、信号传输组件、控制端组件以及电源,所述取样端组件用于接收信号,以及自动鼻咽拭子采样的动作,所述信号传输组件用于完成取样端组件与控制端组件的信号实时双向传输工作,所述控制端组件用于发送鼻咽拭子采样的指令,并控制取样端组件进行采样工作,所述电源用于取样端组件、信号传输组件以及控制端组件的能源供应;
本实施例中,所述取样端组件包括座椅、运动控制部件、图像采集部件、取样部件以及自动消毒部件,所述取样座椅上设置有头部固定装置,所述运动控制部件包括六自由度机械手与六维力传感器,所述六维力传感器用于实时感知取样工作中,取样部件与咽部组织的接触力,所述图像采集部件,包括内窥镜、彩色摄像头以及医用X光显影机,所述内窥镜用于观察患者咽喉位置的高清3D解剖情景,内窥镜位于六自由度机械手前端,所述医用X光显影机位于患者头部位置一侧,所述取样部件包括挠性取样管与取样拭子,所述取样拭子位于挠性取样管前端,并包裹在挠性取样管前部位置。
本实施例中,所述信号传输组件包括有线通讯装置和无线通讯装置,所述有线通讯装置采用同轴电缆,有线通讯装置的带宽不小于1000M,所述有线通讯装置采用以太网进行信息传输与控制指令的发出,所述无线通讯装置采用2.4G/5G双频网络。
本实施例中,所述控制端组件包括显示器,上位机,机器人运动控制卡以及指令输入设备,所述显示器采用IPS显示屏,分辨率不低于1920×1080,所述上位机采用联想-GeekPro型号PC机,所述指令输入设备包括键盘,鼠标,所述上位机用于接收来自取样端组件中采集的信息,并将信息显示在显示器上,所述指令设备通过输入运动指令,并经由上位机发送至机器人运动控制卡,使机械臂按照指令进行运动。
本实施例中,所述控制端组件中的上位机安装有Linux系统,并安装有与机器人运动控制卡相配套的机器人动作控制程序,所述控制端组件中的指令输入设备包括鼠标、键盘。
本实施例中,所述有线通讯装置采用总线进行传输时,总线采用SPI总线和I2C总线,所述SPI总线用于六自由度机械手的前后移动,所述I2C总线用于六自由度机械手的上下左右移动。
本实施例中,所述挠性取样管采用塑料防爆挠性取样管,所述取样拭子采用带有明胶的消毒棉,以提高取样效果。
本实施例中,所述内窥镜采用电子内窥镜,所述彩色摄像头分辨率不低于1080P。
本实施例中,所述电源采用外接电网供电以及蓄电池供电,在外接电网时供电时,同时为蓄电池充电,当在外接电网时断电时,仅采用蓄电池充电,外接电网供电以及蓄电池供电电压为220V。
本实施例的工作方法如下:
在本装置进行工作时,首先由医护人员将取样部件固定至机械手前端后,离开取样室,而后病人进入取样室中,并坐在座椅上,病人自行将头部使用头部固定器进行固定,随后电子内窥镜启动,内窥镜与取样部件紧邻,并确保内窥镜镜头可以观测到取样拭子及其前部画面,内窥镜的画面通过信号传输部件传入控制端组件,并由控制端组件中的联想-GeekPro型号PC机将图像实时显示在显示器中,医护人员通过显示器可以清晰的观测到挠性取样管和取样拭子与患者的相对距离,医护人员通过指令输入设备向联想-GeekPro型号PC机中机器人动作控制程序中输入六自由度机械手的运动指令,而后由联想-GeekPro型号PC机发送至机器人运动控制卡,并由机器人运动控制卡控制六自由度机械手进行操作运动;在取样部件进入患者鼻腔之前时,采用内窥镜的图像来帮助医护人员发送指令操作六自由度机械手将取样部件移入患者鼻腔,在取样部件进入患者鼻腔后,采用内窥镜图像控制取样部件的深入直至到达鼻咽位置,并在鼻咽处通过六自由度机械手将取样部件进行旋转,从而进行取样,若内窥镜观测效果不佳,开启医用X光显影机进行辅助观测,确保在取样部件深入过程中,不伤及患者;通过设置在六自由度机械手上的六维力传感器及时感知取样部件与患者咽部组织接触力的大小并将接触力大小通过信号传输组件传输至控制端组件中的显示器,当六维力传感器检测到取样部件与患者咽部组织接触力较大时,联想-GeekPro型号PC机控制显示器对医护人员进行提示报警,提醒医护人员继续操作可能会使患者受伤,从而提醒医护人员及时调整六自由度机械手的动作,保障患者的安全,待取样结束后,医护人员通过发送指令控制六自由度机械手将取样部件取出,而后患者解下头部固定装置,即可离开,随后,由医护人员进入取样室取下取样部件,并安装新的取样部件,从而完成取样工作。在取样过程中,对于信息的传递采用有线通讯方式与无线通讯方式并行进行,并采用高速的传输技术,确保控制端部件可以实时的接收到来自电子内窥镜、彩色摄像头、医用X光显影机以及六维力传感器的信息大大的降低延迟,减少医疗事故,同时也可以实时操控六自由度机械手,快速准确的完成采样工作;通过采用外接电网以及蓄电池的联合供电方法,可以保证在外接电网断电时对患者进行及时的取样工作,提高了设备的可靠性以及可用性。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。