面阵探测器的标定方法、系统及积分球均匀性标定方法
文献发布时间:2023-06-19 10:22:47
技术领域
本发明属于光学测试领域,涉及面阵探测器的标定方法及系统。
技术背景
积分球是一个内壁涂有白色漫反射材料的空腹球体又称光度球,光通球。把光源放置在积分球内,光源发出的光在球内壁上经无数次的漫反射,充分积分后,最终在积分球出光口平面的光斑是一种十分均匀的漫射光。主要用于实验室内的成像系统、器件的标定校正。
一般认为积分球光源是具有较高的时间稳定性和空间均匀性,其时间稳定度一般可达到98%,空间均匀性可达98%。但随着对成像系统和器件的标定精度要求越来越高,一般积分球光源自身的光源时间稳定性误差和积分球输出光的空间不均匀性误差已不能满足高精度标定的要求。
发明内容
本发明的目的是为了解决积分球光源亮度随时间变化和输出光的空间不均匀所造成的测试误差,提出了一种面阵探测器的标定方法及系统,该方法还可应用于积分球输出均匀性的标定。
基本原理如下:设计均匀光源装置,其由积分球、光源、电动光阑组成,保证均匀光源装置能够输出稳定能量可调的均匀光,满足被标定面阵探测器测试要求;设计时间稳定性校准模块,其由数据采集控制系统、时间同步系统、光电探测器组成,为被标定面阵探测器提供准确的时间稳定性修正系数;设计空间均匀性校准模块,其由数据采集控制系统、时间同步系统、光电探测器、二维平移台、校准坐标板组成,为被标定面阵探测器提供准确的空间均匀性修正系数。利用时间稳定性修正系数与空间均匀性修正系数对被标定面阵探测器的测试数据进行修正。
本发明的技术解决方案如下:
面阵探测器的标定方法,其特殊之处在于,包括以下步骤:
步骤1、搭建标定系统;
将光电探测器A安装在积分球内;将校准坐标板与光电探测器B安装在积分球出光口处并位于积分球与被标定面阵探测器之间;
步骤2、获得空间均匀性修正系数;
针对校准坐标板上不同的标定点,同时采集光电探测器A和光电探测器B的输出值,并根据其计算得到各个标定点对应的空间均匀性修正系数;将被标定面阵探测器拍摄校准坐标板的图像与校准坐标板的标定点坐标比对获得空间均匀性修正系数;
步骤3、获得时间稳定性修正系数;
被标定面阵探测器开始采集图像同时采集光电探测器A输出值,对采集数据进行处理,获得时间稳定性修正系数;
步骤4、将空间均匀性修正系数和时间稳定性修正系数带入被标定面阵探测器采集的数据,得到标定后的数据。
进一步地,步骤2具体为:
步骤21、在校准坐标板上选取n个标定点,其中n为大于等于2的自然数;依次控制光电探测器B移动至各个标定点,光电探测器B到达每个标定点处时,同步采集光电探测器A的输出值a
步骤22、根据公式1计算光电探测器A输出值a
根据公式2计算各个标定点对应的时间稳定性修正系数t
步骤23、根据公式3计算得到各个标定点处,去除时间影响的光电探测器B的输出值b
根据公式4计算光电探测器B输出值b
步骤24、根据公式5计算各个标定点对应的空间均匀性修正系数s
步骤25、使用被标定面阵探测器拍摄校准坐标板,将拍摄到的图像与校准坐标板标定点坐标比对,获得与标定点坐标对应的探测器各像元或区域的空间均匀性修正系数s
步骤3具体为:
步骤31、控制光电探测器A采集时间与被标定面阵探测器曝光时间同步;
分别采集被标定面阵探测器不同曝光时间内光电探测器A的输出值,每个曝光时间内,光电探测器A具有多个输出值;计算各个曝光时间内,光电探测器A多个输出值的平均值a
步骤32、根据公式6计算被标定面阵探测器所有曝光时间内光电探测器A的输出值的平均值
步骤33、根据公式7计算被标定面阵探测器第j次曝光时间内的时间稳定性修正系数t
步骤4具体为:
根据公式8计算被标定面阵探测器第j次曝光第i个像元或区域的修正测试值η
其中η
进一步地,步骤21中通过控制二维平移台使光电探测器B移动至各个标定点。
本发明还提供一种面阵探测器的标定系统,其特殊之处在于:包括光源、积分球、数据采集控制系统、时间同步系统、光电探测器A、光电探测器B及校准坐标板;
所述光源与光电探测器A安装在积分球上;所述光电探测器A、光电探测器B及时间同步系统均与数据采集控制系统相连;所述时间同步系统与被标定面阵探测器相连;所述校准坐标板与光电探测器B位于积分球出光口处;
所述光源用于给积分球提供稳定的光能量;所述积分球用于匀化光能量;所述光电探测器A用于测量积分球内光能量;所述时间同步系统用于发送同步采集控制指令至数据采集控制系统;所述光电探测器B用于采集校准坐标板上各个标定点处积分球出光口处的光能量;所述数据采集控制系统包括存储器与处理器,所述存储器内储存计算机程序,所述计算机程序被处理器运行时,执行以下步骤:
步骤a、获得空间均匀性修正系数;
接收时间同步系统发送的同步采集控制指令,针对不同的标定点,同时采集光电探测器A和光电探测器B的输出值,并根据其计算得到各个标定点对应的空间均匀性修正系数;将被标定面阵探测器拍摄校准坐标板的图像与校准坐标板的标定点坐标比对获得空间均匀性修正系数;
步骤b、获得时间稳定性修正系数;
接收时间同步系统发送的同步采集控制指令,被标定面阵探测器开始采集图像,同时采集光电探测器A输出值,对采集数据进行处理,获得时间稳定性修正系数;
步骤c、将空间均匀性修正系数和时间稳定性修正系数带入被标定面阵探测器采集的图像数据,得到修正后的数据。
进一步地,步骤a具体为:
步骤a1、依次控制光电探测器B移动至各个标定点,光电探测器B到达每个标定点处时,根据时间同步系统发送的指令同步采集光电探测器A的输出值a
步骤a2、根据公式1计算光电探测器A输出值a
根据公式2计算各个标定点对应的时间修正系数t
步骤a3、根据公式3计算得到各个标定点处,去除时间影响的光电探测器B的输出值b
根据公式4计算光电探测器B输出值b
步骤a4、根据公式5计算各个标定点对应的空间均匀性修正系数s
步骤a5、将被标定面阵探测器拍摄校准坐标板的图像与校准坐标板标定点坐标比对,获得与标定点坐标对应的探测器各像元或区域的空间均匀性修正系数s
步骤b具体为:
步骤b1、根据时间同步系统发送的指令,使得光电探测器A采集时间与被标定面阵探测器曝光时间同步;
分别采集被标定面阵探测器不同曝光时间内光电探测器A的输出值,每个曝光时间内,光电探测器A具有多个输出值;计算各个曝光时间内,光电探测器A多个输出值的平均值a
步骤b2、根据公式6计算被标定面阵探测器所有曝光时间内光电探测器A的输出值的平均值
步骤b3、根据公式7计算被标定面阵探测器第j次曝光时间内的时间稳定性修正系数t
步骤c具体为:
根据公式8计算被标定面阵探测器第j次曝光第i个像元或区域的修正测试值η
其中η
进一步地,为了调节输出的光能量以及调节光电探测器B位置,该标定系统还包括与数据采集控制系统连接的二维平移台和电动光阑;二维平移台和电动光阑根据数据采集控制系统的控制指令实现移动;所述二维平移台放置在积分球出光口处,光电探测器B安装在二维平移台的载物台上;所述校准坐标板安装在二维平移台的正面,正对被标定面阵探测器面;
所述电动光阑安装在积分球入光口处,且位于光源与积分球之间,通过控制电动光阑来调节积分球输出光亮度。
进一步地,所述光源为单色光或复色光。
进一步地,所述校准坐标板尺寸大于积分球出光口面积。
本发明还提供一种积分球输出均匀性标定方法,其特殊之处在于,包括以下步骤:
步骤1、搭建标定系统;
将光电探测器A安装在积分球内;将校准坐标板与光电探测器B安装在积分球出光口处;
步骤2、在校准坐标板上选取n个标定点,其中n为大于等于2的自然数;依次控制光电探测器B移动至各个标定点,光电探测器B到达每个标定点处时,同步采集光电探测器A的输出值a
步骤3、根据公式1计算光电探测器A输出值a
根据公式2计算各个标定点对应的时间稳定性修正系数t
步骤4、根据公式3计算得到各个标定点处,去除时间影响的光电探测器B的输出值b
根据公式4计算光电探测器B输出值b
步骤5、根据公式5计算各个标定点对应的空间均匀性修正系数s
本发明的有益效果是:
1、本发明通过对积分球输出光的时间稳定性以及空间均匀性进行标定,减少了光源时间稳定性和积分球输出光的空间不均匀性所带来的测试误差。
2、本发明标定系统结构简单,易于工程实现,降低了高时间稳定度和高空间均匀性积分球光源的设计难度。
3、本发明中获取测试用空间均匀性修正系数的方法可用于标定其他积分球的输出均匀性。
附图说明
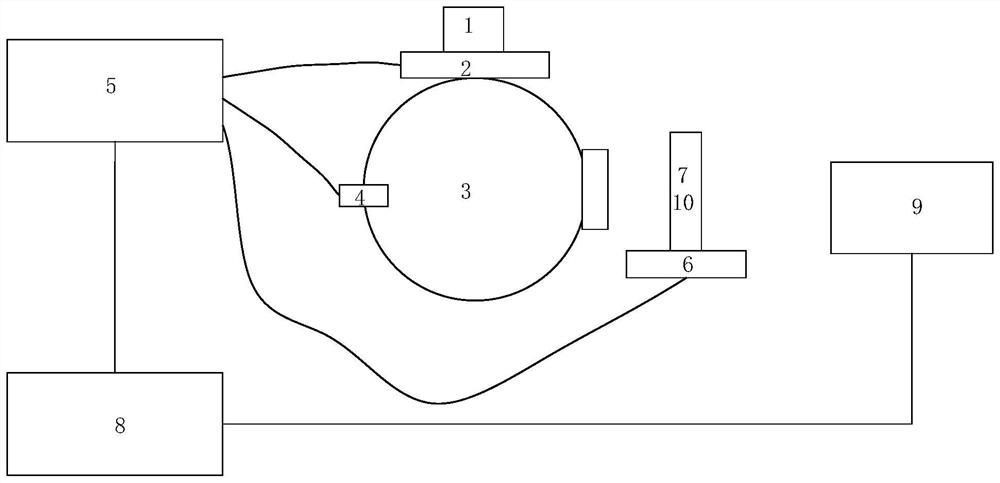
图1为实施例中标定系统示意图;
图中附图标记为:1-光源,2-电动光阑,3-积分球,4-光电探测器A,5-数据采集控制系统,6-二维平移台,7-光电探测器B,8-时间同步系统,9-被标定面阵探测器,10-校准坐标板。
具体实施方式
以下结合附图及具体实施例对本发明做进一步地描述。
如图1所示,本实施例标定系统由均匀光源装置、时间稳定性校准模块及空间均匀性校准模块组成。利用时间稳定性校准模块实时采集积分球能量用于给被标定面阵探测器测试数据提供时间稳定性修正系数。空间均匀性校准模块用于对积分球输出口的面均匀性进行标定。通过被标定面阵探测器拍摄校准坐标板来确定空间稳定性修正系数。
其中均匀光源装置包括光源1、电动光阑2及积分球3,光源1及电动光阑2固定在积分球3的入光口处,光源1提供稳定的光能量输出,可以是单色光也可是复色光,通过控制电动光阑2调节输入给积分球3的光能量大小。光能量进入积分球3后经过匀化后输出。
时间稳定性校准模块包括光电探测器A4、数据采集控制系统5及时间同步系统8;光电探测器A4与时间同步系统8均与数据采集控制系统5连接。被标定面阵探测器9与时间同步系统8连接。光电探测器A4安装在积分球3上,用于探测积分球3内部的光能量。时间同步系统8可以发送同步信号至数据采集控制系统5,用于光电探测器A4及被标定面阵探测器9的时间同步;数据采集控制系统5用于接收时间同步系统8发送的同步采集控制指令,被标定面阵探测器9开始采集图像同时采集光电探测器A4输出值,对采集数据进行处理,获得时间稳定性修正系数。
空间均匀性校准模块包括光电探测器A4、数据采集控制系统5、时间同步系统8、光电探测器B7、校准坐标板10及二维平移台6;其中光电探测器A4、数据采集控制系统5、及时间同步系统8与时间稳定性校准模块共用。光电探测器A4、光电探测器B7、时间同步系统8及二维平移台6均与数据采集控制系统5连接。二维平移台6放置在积分球3出光口的固定位置,电电探测器B安装在二维平移台6的载物台上;校准坐标板10安装在二维平移台6的正面,正对被标定面阵探测器9面;数据采集控制系统5可以控制电动光阑2和二维平移台6运动。二维平移台6用于带动光电探测器B7移动至校准坐标板10的各个标定点处。光电探测器B7用于采集校准坐标板10上各个标定点处积分球3出光口处的光能量;时间同步系统8可以发送同步信号至数据采集控制系统5,用于光电探测器A4及光电探测器B7的时间同步;数据采集控制系统5用于接收时间同步系统8发送的同步采集控制指令,针对不同的标定点,同时采集光电探测器A4和光电探测器B7的输出值,并根据其计算得到各个标定点对应的空间均匀性修正系数;将被标定面阵探测器9拍摄校准坐标板10的图像与校准坐标板10的标定点坐标比对获得空间均匀性修正系数。
本发明的工作原理为:
面阵探测器标定通常使用积分球光源模拟稳定的均匀光源。积分球光源用于标定时其主要误差来源:光源时间稳定性和积分球输出光的空间不均匀性。
在积分球内壁放置探测器测量积分球内光源能量随时间的变化,使用时间同步技术实现探测器和被标定面阵探测器的同时采集。计算得到时间稳定性修正系数,进而消除各时刻由于光能量变化带来的测量误差。对积分球输出光的空间分布建立坐标系并且进行精确测量,使用被标定面阵探测器拍照坐标板来确定被标定面阵探测器各像元或区域接收到的光能量所对应的积分球输出的空间坐标。计算得到空间均匀性修正系数,进而消除该时刻由于空间不均匀性带来的测量误差。
本发明具体工作过程如下:
首先对积分球输出口的空间均匀性进行标定:
在校准坐标板10上选取n个标定点,其中n为大于等于2的自然数;
将二维平移台6放置在积分球3出光口的固定位置。通过控制二维平移台6将光电探测器B7按照校准坐标板10的坐标分步移动至各个标定点,到达各个标定点时,通过时间同步系统8和数据采集控制系统5同步采集光电探测器A4和光电探测器B7两个光电探测器的输出值a
采集完成后计算光电探测器A4输出值a
根据公式2计算各个标定点对应的时间修正系数t
根据公式3计算得到各个标定点处,去除时间影响的光电探测器B7的输出值b
根据公式4计算光电探测器B7输出值b
根据公式5计算各个标定点对应的空间均匀性修正系数s
将被标定面阵探测器9放置在合适的测试位置,保证被标定面阵探测器9视场不大于校准坐标板10。使用被标定面阵探测器9拍摄校准坐标板10,将拍摄到的图像与校准坐标板10坐标比对,获得与标定点坐标对应的探测器各像元或区域的空间均匀性修正系数s
获取测试用时间稳定性修正系数t
使用时间同步系统8实现被标定面阵探测器9曝光时间与光电探测器A4采集时间同步。
分别采集被标定面阵探测器9不同曝光时间内光电探测器A4的输出值,每个曝光时间内,光电探测器A4的具有多个输出值;计算各个曝光时间内,光电探测器A4多个输出值的平均值a
根据公式6计算被标定面阵探测器9所有曝光时间内光电探测器A4的输出值的平均值
根据公式7计算被标定面阵探测器9第j次曝光时间内的时间稳定性修正系数t
获取测试数据:被标定面阵探测器9第j次曝光第i个像元或区域的修正测试值为等于实际测试值除以空间均匀性修正系数s
其中η
本发明中获取测试用空间均匀性修正系数的方法可用于标定其他积分球的输出均匀性,具体可包括以下步骤:
步骤1、搭建标定系统;
将光电探测器A4安装在积分球内;将校准坐标板10与光电探测器B7安装在积分球3出光口处;
步骤2、在校准坐标板10上选取n个标定点,其中n为大于等于2的自然数;依次控制光电探测器B7移动至各个标定点,光电探测器B7到达每个标定点处时,同步采集光电探测器A4的输出值a
步骤3、根据公式1计算光电探测器A4输出值a
根据公式2计算各个标定点对应的时间稳定性修正系数t
步骤4、根据公式3计算得到各个标定点处,去除时间影响的光电探测器B7的输出值b
根据公式4计算光电探测器B7输出值b
步骤5、根据公式5计算各个标定点对应的空间均匀性修正系数s
- 面阵探测器的标定方法、系统及积分球均匀性标定方法
- 面阵探测器的标定方法、系统及积分球均匀性标定方法