一种构建三相异步电动机数字孪生体的终端感知系统
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及三相异步动机电终端感知领域,具体指一种构建三相异步电动机数字孪生体的终端感知系统。
背景技术
三相异步电动机作为工业生产中最主要的原动力和驱动装置,在煤矿、能源、化工等工业领域当中都是其核心设备,一旦三相异步电动机出现故障,整个工业运行系统可能会面临全面瘫痪的风险,造成不可预料的经济损失,甚至危及现场工作人员的生命安全。因此三相异步电动机的故障检测及故障诊断具有重要的研究意义。
目前三相异步电动机的故障诊断大部分处于现场就地检测诊断阶段,少部分已经开始使用远程虚拟仿真诊断。现场就地诊断需要专家人员到工作现场进行测量诊断,受空间限制,工作效率较低。远程虚拟仿真,通过预先建立的虚拟模型对三相异步电动机运行过程进行仿真,推算出可能出现的故障,而由于传感器和通信技术的限制,往往只能采集三相异步电动机电压、电流等较少的数据参数,构建的虚拟仿真模型与实际三相异步电动机关联简单,无法实时映射,因而三相异步电动机故障诊断的准确性低,实时性差。
发明内容
为解决上述背景技术中提到的不足,本发明的目的在于提供一种构建三相异步电动机数字孪生体的终端感知系统。
本发明的目的可以通过以下技术方案实现:
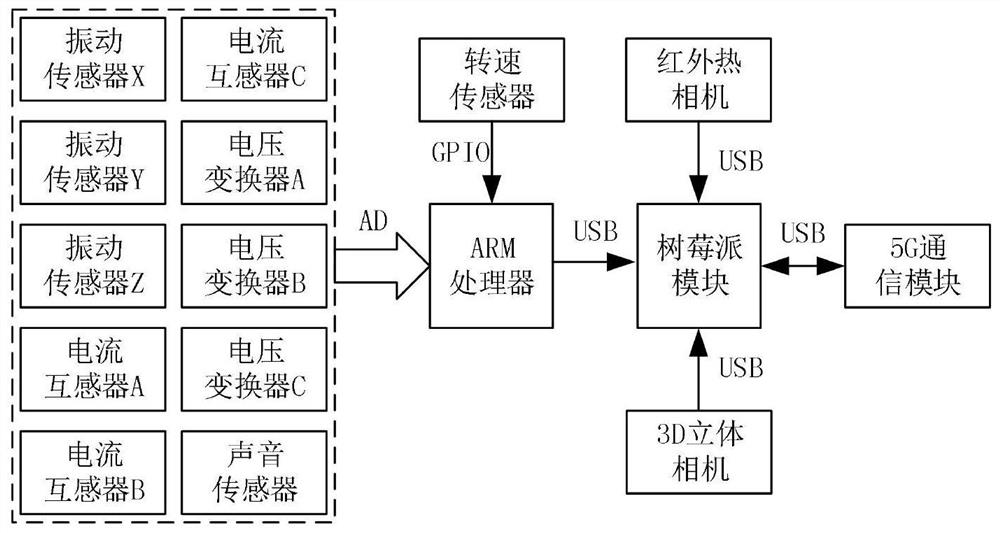
一种构建三相异步电动机数字孪生体的终端感知系统,包括ARM处理器、树莓派模块、振动传感器X、振动传感器Y、振动传感器Z、电流互感器A、电流互感器B、电流互感器C、电压变换器A、电压变换器B、电压变换器C、声音传感器、转速传感器、红外热相机、3D立体相机和5G通信模块,所述振动传感器X、振动传感器Y、振动传感器Z、电流互感器A、电流互感器B、电流互感器C、电压变换器A、电压变换器B、电压变换器C和声音传感器分别与ARM处理器不同的AD接口相连接;所述转速传感器与ARM处理器的GPIO接口相连接;所述ARM处理器、红外热相机、3D立体相机和5G通信模块分别与树莓派模块的不同USB接口相连接。
进一步地,所述电流互感器型号为MIK-DJI-5A~300A,用于测量三相异步电动机的三相电流,In+和In-指示的线路为三相异步电动机电源线路,电流互感器套接在三相异步电动机电源线路上,其接线端子1和2分别接直流5V电源的正极和负极,端子3输出测量的电流值,端子4接电源共地端GND。
进一步地,所述电压变换器采用MIK-SJU-5~500V,其可以同时测量三相异步电动机电源的三相电压值,UinA、UinB和UinC端分别接到三相异步电动机电源的A、B、C三相,输出端5和6分别接直流24V的正极和负极,输出端1、2、3分别输出测得的A、B、C三相电压值。
进一步地,所述振动传感器采用TXY9200,用于测量三相异步电动机运行时振动产生的偏移情况。底盘用于将传感器固定在三相异步电动机上,输出端红色线和屏蔽线分别接在直流24V电源的正极和负极,输出端蓝色线为测量的振动偏移值。
进一步地,所述声音传感器采用LM386-AD,用于测量三相异步电动机运行时声音信息,其输出V和G分别接到直流5V电源的正极和负极,端子A为测得的声音信息。
进一步地,所述转速传感器使用增量式编码器E6B2-CWZ6C,用于测量三相异步电动机转动速度,将其轴承与三相异步电动机轴承同轴相对连接固定,输出端棕色和蓝色线分别连接直流24V电源的正极和负极,当三相异步电动机转动时,黑色、白色和橙色线分别输出脉冲,通过对脉冲计数和时序的判断即可得到三相异步电动机转动方向和转动速度。
进一步地,所述ARM处理器采用STM32F407处理器,其内核为Cortex
本发明的有益效果:
1、本发明通过三个电流互感器可以分别实时感知三相异步电动机三相电流数据、三个电压变换器可以分别实时采集三相异步电动机三相电压数据,为构建数字孪生体提供电气参数;三个振动传感器分别感知三相异步电动机在X、Y、Z三个方向上的振动数据,声音传感器捕捉三相异步电动机运行时异常声音,转速传感器感知三相异步电动机转动状态,为构建数字孪生体提供机械运动参数。红外热相机可以通过图像的方式实时感知整个三相异步电动机的温度数值和分布,3D立体相机可以获取三相异步电动机的三维几何形状和表面纹理信息,为构建数字孪生体提供相关物理属性。
2、本发明将全面感知的三相异步电动机运行时所有状态参数,通过5G通信模块实时传输,为远程构建三相异步电动机数字孪生体提供全面、实时、准确数据信息,为三相异步电动机可靠、高效的故障诊断提供了强大的数据支持。
附图说明
下面结合附图对本发明作进一步的说明。
图1为本发明的组成结构示意图;
图2为本发明电流互感器示意图;
图3为本发明电压变换器示意图;
图4为本发明振动传感器示意图;
图5为本发明声音传感器示意图;
图6为本发明转速传感器示意图;
图7为本发明电流、电压、振动、声音、转速传感器与ARM处理器连接电路图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1所示,是一种构建三相异步电动机数字孪生体的终端感知系统的组成结构示意图,包括ARM处理器、树莓派模块、振动传感器X、振动传感器Y、振动传感器Z、电流互感器A、电流互感器B、电流互感器C、电压变换器A、电压变换器B、电压变换器C、声音传感器、转速传感器、红外热相机、3D立体相机和5G通信模块。所述振动传感器X、振动传感器Y、振动传感器Z、电流互感器A、电流互感器B、电流互感器C、电压变换器A、电压变换器B、电压变换器C和声音传感器分别与ARM处理器不同的AD接口相连接;所述转速传感器与ARM处理器的GPIO接口相连接;所述ARM处理器、红外热相机、3D立体相机和5G通信模块分别与树莓派模块的不同USB接口相连接。
如图2所示,本实施例中电流互感器型号为MIK-DJI-5A~300A,用于测量三相异步电动机的三相电流,In+和In-指示的线路为三相异步电动机电源线路,电流互感器套接在三相异步电动机电源线路上,其接线端子1和2分别接直流5V电源的正极和负极,端子3输出测量的电流值,端子4接电源共地端GND。
如图3所示,电压变换器采用MIK-SJU-5~500V,其可以同时测量三相异步电动机电源的三相电压值。UinA、UinB和UinC端分别接到三相异步电动机电源的A、B、C三相,输出端5和6分别接直流24V的正极和负极,输出端1、2、3分别输出测得的A、B、C三相电压值。
如图4所示,振动传感器采用TXY9200,用于测量三相异步电动机运行时振动产生的偏移情况。底盘用于将传感器固定在三相异步电动机上,输出端红色线和屏蔽线分别接在直流24V电源的正极和负极,输出端蓝色线为测量的振动偏移值。
如图5所示,声音传感器采用LM386-AD,用于测量三相异步电动机运行时声音信息。其输出V和G分别接到直流5V电源的正极和负极,端子A为测得的声音信息。
如图6所示,转速传感器使用增量式编码器E6B2-CWZ6C,用于测量三相异步电动机转动速度。将其轴承与三相异步电动机轴承同轴相对连接固定,输出端棕色和蓝色线分别连接直流24V电源的正极和负极,当三相异步电动机转动时,黑色、白色和橙色线分别输出脉冲,通过对脉冲计数和时序的判断即可得到三相异步电动机转动方向和转动速度。
如图7所示,ARM处理器采用STM32F407处理器,其内核为CortexTM-M4,具有2个16通道12位的AD转换器,集成了单周期DSP指令和FPU(floatingpoint unit,浮点单元),提升计算能力,可以进行一些复杂的计算和控制。
实施例中采用三个电流互感器分别套接到三相异步电动机的三相电源线上,感知每个电源线中的电流值,将输出端分别接到STM32F407的ADC1通道1、通道2和通道3引脚;将电压互感器连接到三相异步电动机的三相电源线上,分别测量三相电的电压值,并将其输出分别接到STM32F407的ADC1通道5、通道6和通道7引脚;使用三个振动传感器,分别安装在三相异步电动机外壳的X、Y和Z轴方向上,用于测量三相异步电动机在X、Y、Z三个方向的振动情况,并将其输出分别接到STM32F407的ADC1通道10、通道11和通道12的引脚上;将声音传感器安装到三相异步电动机近距离的位置上,用于感知三相异步电动机运转时的声音信息,并将其输出连接到STM32F407的ADC1通道13引脚上;增量编码器用于测量三相异步电动机转速,其输出端A、B、Z分别接到STM32F407的GPIO_PB6、GPIO_PB7和GPIO_PB8引脚。STM32F407处理器可以通过12位的ADC接口将电流互感器、电压变换器、振动传感器和声音传感器采集的模拟量参数转换成数字量,通过GPIO口捕捉增量编码器输出的脉冲,计算出三相异步电动机的转速。红外热相机采用菲力尔FLIR ONE PRO热成像仪,可以对拍摄到的160×120图像测温,准确获取整个图像中每个像素点的温度情况,温度测量范围为-20℃~400℃。3D立体相机使用Zed双目相机,其拍摄的图像不仅可以获取物体的颜色形状信息,还可以测量图像中每个像素点的深度信息,通过它可以获取三相异步电动机的三维空间的形状尺寸。5G通信模块采用华为的MH5000,可以将测量的大量三相异步电动机数据快速的传输到移动互联网中。各种传感器采集的数据和5G传输都采用树莓派4B模块进行控制处理,ARM处理器、红外热相机、3D立体相机和5G通信模块分别通过USB接口与树莓派模块通信连接。
系统运行时,通过三个电流互感器实时采集三相异步电动机的三相电流、电压变换器实时采集三相异步电动机三相电压、振动传感器分别采集三相异步电动机X、Y和Z轴的振动信息,声音传感器感知三相异步电动机运行时噪声情况,转速传感器实时测量三相异步电动机转动速度,ARM处理器分别对上述感知的三相异步电动机参数进行AD变换,计算出三相异步电动机的电流、电压、振动和声音值,通过GPIO口引脚捕捉增量编码器输出的脉冲信号,计算出三相异步电动机的转速,再通过USB发送到树莓派模块中;红外热相机对三相异步电动机进行热成像的拍摄,获取整个三相异步电动机的温度分布信息、最高温信息及其对应的位置信息,通过USB发送到树莓派模块中;3D立体相机获取三相异步电动机的三维尺寸信息和表面纹理信息,并通过USB发送到树莓派模块中;树莓派模块在获取到三相异步电动机的三相电压、三相电流、三方向振动、声音、转速、整体温度和三维尺寸、形状、纹理信息后,通过5G通信模块发送到移动互联网中,为远程构建三相异步电动机数字孪生体提供全面、实时、准确数据信息。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
- 一种构建三相异步电动机数字孪生体的终端感知系统
- 一种构建三相异步电动机数字孪生体的终端感知系统