电子元件作业机构及其应用的作业设备
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及一种利用调整器带动作业具作至少一方向弧度摆动调整作业角度,以提升作业精确性的电子元件作业机构。
背景技术
在现今,电子元件(如晶片)的覆晶薄膜封装(Chip-On-Filmpackage,COF),主要利用一可挠性的卷带或软性电路板作为具有电路图案的载体,并凭借热压合制程将晶片固接于卷带或软性电路板;然该软性电路板上的电路图案具有复数个电性接点,晶片也具有复数个接脚,热压合制程系以热压合作业机构的搬运器驱动移动臂作第一、二、三方向(如X、Y、Z方向)位移,移动臂则带动一具加热件的热压合具作X-Y-Z方向位移,热压合具系将待热压合的晶片移载至一热压承座所承载的软性电路板上,令晶片的复数个接脚对应于软性电路板的复数个电性接点,热压合具再将晶片的复数个接脚热压固接于软性电路板的复数个电性接点,进而完成热压合作业;然而,该热压合作业机构的搬运器系以复数个相互组装的X方向构件、Y方向构件及Z方向构件而带动移动臂作X-Y-Z方向位移,由于热压合具装配于移动臂,当移动臂因X方向构件、Y方向构件及Z方向构件间的组装累积误差而导致热压合具向前后方或左右方倾斜摆置时,即无法使热压合具平均施力压合晶片的复数个接脚,以致晶片的部分接脚无法确实固接软性电路板的部分电性接点,造成热压合品质不佳及影响后续测试制程准确性的缺失。
发明内容
本发明的目的在于:提供一种,解决现有技术中存在的上述技术问题。
为实现上述目的,本发明采用的技术方案是:
一种电子元件作业机构,是在移动臂与作业具之间装配调整器,其特征在于,该调整器包含:
承载单元:装配于该移动臂与该作业具之间,并设有复数个承载具;
调整单元:是在该复数个承载具之间设有相互配合的滑接部件及接配部件,并于该滑接部件设有具弧型曲线的导移部,还设有至少一调控具,以驱控该滑接部件或至少一该承载具作动,使该调整器带动该作业具作至少一方向弧度摆动调整作业角度。
所述的电子元件作业机构,其中,该承载单元包含第一承载具及第二承载具,该第一承载具装配于该移动臂,该第二承载具装配于该第一承载具,并连结该作业具,该调整单元是在该第一承载具与该第二承载具之间装配具有第一导移部的第一滑接部件及第一接配部件,还在该第一承载具与该第二承载具之间设有第一调控具,以驱动该第一滑接部件及该作业具作第二方向弧度摆动调整作业角度。
所述的电子元件作业机构,其中,该调整单元是在该第一承载具与该第一滑接部件之间设置相互配合的第二接配部件及第二导移部。
所述的电子元件作业机构,其中,该调整单元是在该第一承载具与该第二承载具之间设有第一弹簧。
所述的电子元件作业机构,其中,该承载单元设置第三承载具及第四承载具,该第三承载具装配于该第二承载具,该第四承载具装配于该第三承载具的下方,并连结该作业具,该调整单元是在该第三承载具与该第四承载具之间装配具有第三导移部的第二滑接部件及第三接配部件,还在该第三承载具与该第四承载具之间设有第二调控具,以驱动该第四承载具及该作业具作第一方向弧度摆动调整作业角度。
所述的电子元件作业机构,其中,该调整单元是在该第四承载具与该第二滑接部件之间设置相互配合的第四接配部件及第四导移部。
所述的电子元件作业机构,其中,该调整单元是在该第三承载具与该第四承载具之间设有第二弹簧。
所述的电子元件作业机构,其中,该调整单元是在该第三承载具设有轴杆,该轴杆穿置于该第二承载具,还在该第二承载具与该第三承载具之间设有第三调控具,以驱动该第三承载具及该作业具作水平方向弧度摆动调整作业角度。
所述的电子元件作业机构,其中,该调整单元是在该第二承载具与该第三承载具之间设有第三弹簧。
一种应用电子元件作业机构的作业设备,其中,包含:
机台;
供料装置:配置于该机台,并设有至少一供料承置器,以承置待作业的电子元件;
输送装置:配置于该机台,并设有至少一移料器,以移载待作业的电子元件;
至少一前述电子元件作业机构:配置于该机台,并设有移动臂、作业具及调整器,该调整器包含承载单元及调整单元,以对电子元件执行预设作业,并使该作业具作至少一方向弧度摆动调整作业角度;
中央控制装置:用以控制及整合各装置、机构作动,以执行自动化作业。
本发明的优点一,是提供一种电子元件作业机构,其是在移动臂与作业具之间装配调整器,该调整器包含承载单元及调整单元,承载单元装配于移动臂与作业具之间,并设有复数个承载具,调整单元是在复数个承载具之间设有相互配合的滑接部件及接配部件,并于滑接部件设有具弧型曲线的导移部,另设有至少一调控具,以驱控滑接部件或承载具作动,以利用滑接部件的导移部与接配部件作一相对曲弧位移,进而使调整器带动作业具作至少一方向弧度摆动调整作业角度,达到提升作业精确性的实用效益。
本发明的优点二,是提供一种电子元件作业机构,其中,该调整器的调整单元是在承载单元的二承载具间设有第三调控具,以带动至少一承载具作水平弧度旋转摆动,使得调整器带动作业具执行调整水平摆置角度作业,达到更加提升作业精确性的实用效益。
本发明的优点三,是提供一种电子元件作业机构,其中,该作业机构设有至少一温控器,该温控器可为致冷晶片或加热件等,以使作业具执行热压合作业或测试作业,达到提升使用效能的实用效益。
本发明的优点四,是提供一种应用电子元件作业机构的作业设备,其包含机台、供料装置、作业机构、输送装置及中央控制装置,该供料装置配置于机台,并设有至少一供料承置器,以承置待作业的电子元件;输送装置设有至少一移料器,以移载待作业的电子元件,本发明的作业机构配置于机台,并设有移动臂、作业具及调整器,该调整器包含承载单元及调整单元,以对电子元件执行预设作业,并使作业具作至少一方向弧度摆动调整作业角度;该中央控制装置用以控制及整合各装置、机构作动,以执行自动化作业,达到提升作业效能的实用效益。
附图说明
图1是本发明作业机构的示意图(一)。
图2是本发明作业机构的示意图(二)。
图3是本发明作业机构的示意图(三)。
图4是本发明作业机构的使用示意图(一)。
图5是本发明作业机构的使用示意图(二)。
图6是本发明作业机构的使用示意图(三)。
图7是本发明作业机构应用于热压合作业的使用示意图。
图8是本发明作业机构应用于作业设备的示意图。
附图标记说明:作业机构10;移动臂20;作业具30;吸嘴31;压接部32;调整器40;第一承载具41;长孔411;第一容置空间412;第二承载具42;第三承载具43;轴杆431;面板432;第四承载具44;第二容置空间441;装配部442;第一滑接部件451;第一导移部4511;第二导移部4512;第一接配部件452;第一接触面4521;第二接配部件453;第二滑接部件454;第三导移部4541;第四导移部4542;第三接配部件455;第四接配部件456;第一承架4571;第一驱动件4572;第一抵挡部件4573;第一弹簧4574;第二承架4581;第二驱动件4582;第二抵挡部件4583;第二弹簧4584;第三承架4585;第三驱动件4591;推块4592;第三抵挡部件4593;第三弹簧4594;温控器50;晶片61;软性电路板62;载框模块63;下热压合座70;机台80;供料装置90;供料承置器91;输送装置100;第一移料器101;承载台102;第二移料器103;输送器104;取像装置110;取像器111。
具体实施方式
为使对本发明作更进一步的了解,兹举一较佳实施例,并配合图式,详述如后:
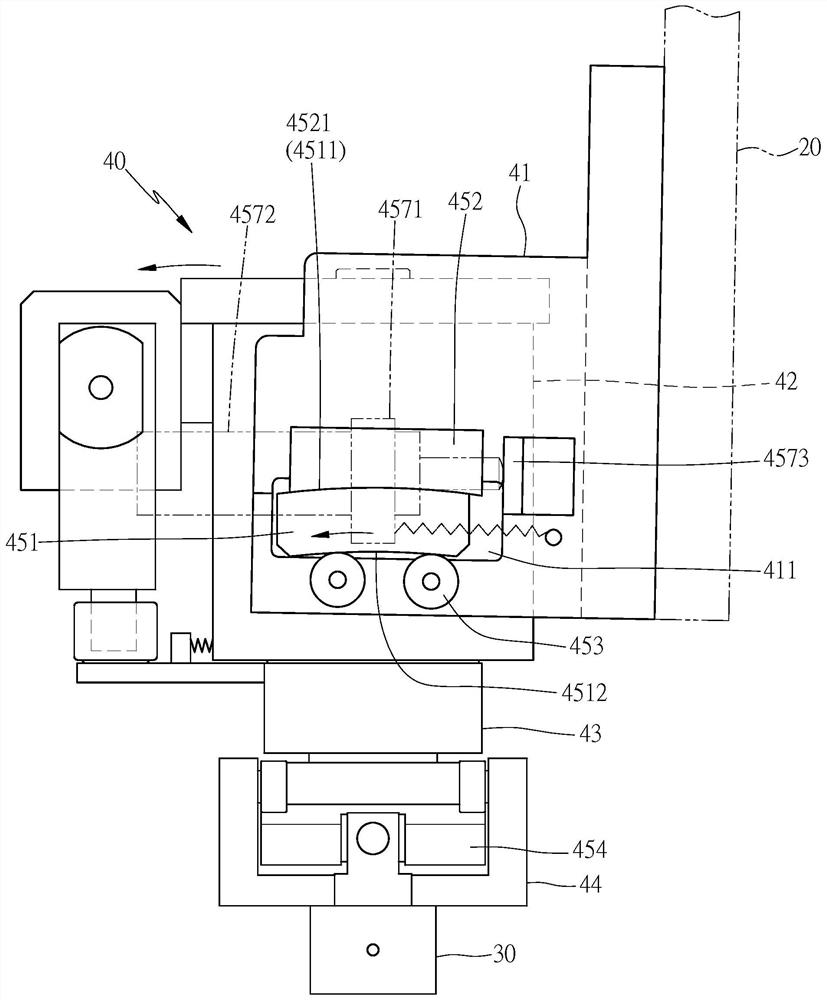
请参阅图1、图2、图3,本发明作业机构10包含移动臂20
、作业具30及调整器40,并可视作业需求而增配温控器50;该移动臂20由搬运器(图未示出)驱动作至少一方向位移,于本实施例中,移动臂20系作第一、二、三方向(如X-Y-Z方向)位移,以带动作业具30及调整器40同步位移;该作业具30装配于调整器40,以对电子元件执行预设作业,更进一步,作业具30可为一执行移载作业的拾取具,也或为一执行移载及下压作业的压移具,也或为一执行移载及热压合作业的热压合具,也或为一执行取像作业的取像具,本发明的作业具30型态不局限于前述物件,可依作业需求而更换配置;该温控器50可配置于作业具30,或配置于作业具30与调整器40之间,温控器50可为致冷晶片或具流体的温控座或加热件,于本实施例中,该作业具30是一具温控器50、吸嘴31及压接部32的热压合具,该温控器50是加热件,并装配于作业具30,以使作业具30可执行热压合作业。
该调整器40包含承载单元及调整单元,该承载单元装配于移动臂20与作业具30之间,并设有复数个承载具,更进一步,该承载单元可包含第一承载具41及第二承载具42,第一承载具41装配于移动臂20,第二承载具42则供装配作业具30,或者该承载单元包含第一承载具41、第二承载具42、第三承载具43及第四承载具44,第一承载具41装配于移动臂20,第四承载具44则供装配作业具30,然该承载单元的承载具的配置数量,以及利用其一承载具供装配作业具30的型式,系依据作业需求而所有不同,并不以本发明所揭示的型态为限;于本实施例中,承载单元包含第一承载具41、第二承载具42、第三承载具43及第四承载具44,第一承载具41装配于移动臂20,并于二侧板开设有长孔411,二侧板之间则设有第一容置空间412,第二承载具42装配于第一承载具41的第一容置空间412,第三承载具43设有一呈Z轴向配置的轴杆431,该轴杆431穿置于第二承载具42,并连结一跨置于第二承载具42顶面的面板432,使第三承载具43装配连结于第二承载具42的下方,并以轴杆431为旋转中心,而于第二承载具42的下方作水平弧度旋转,第四承载具44位于第三承载具43的下方,并概呈凹型,其内部设有第二容置空间441,并以底部作为装配部442,供装配作业具30。
该调整单元是在复数个承载具之间设有相互配合的滑接部件及接配部件,并于滑接部件设有具弧型曲线的导移部,利用滑接部件的导移部与接配部件作一相对曲弧位移,使调整器40带动作业具30作至少一方向弧度摆动调整作业角度;更进一步,该滑接部件可为固定式配置,或为活动式配置作至少一方向弧度位移,该接配部件可为块体或滚轮或弧面,例如该接配部件可为块体,并设有一与滑接部件的导移部相互配合且呈弧面的接触面,又例如该接配部件可为滚轮,以接触于滑接部件的导移部,又例如该接配部件可为弧面,并设于承载具的内底面,以与滑接部件的导移部相互配合;更进一步,该该调整单元是在该第一承载具41与该第二承载具42之间装配相互配合的具第一导移部的第一滑接部件及第一接配部件,也或该第三承载具43与该第四承载具44之间装配相互配合的具第三导移部的第二滑接部件及第三接配部件,该滑接部件的型式、配置数量及位置系依据作业需求而所有不同,并不以本发明所揭示的型态为限;于本实施例中,调整单元是在承载单元的第二承载具42侧面装配有第一滑接部件451,第一滑接部件451的顶面设有一呈弧型曲线的第一导移部4511,于底面设有一呈弧型曲线的第二导移部4512,第一滑接部件451穿伸出第一承载具41的长孔411,并可于长孔411内作位移,调整单元并于第一承载具41的侧板外部且位于第一滑接部件451上方配置第一接配部件452,第一接配部件452的底面设有呈弧型曲线的第一接触面4521,由于第一接触面4521与第一导移部4511具有相互配合的弧型曲线,第一接配部件452以第一接触面4521接触第一滑接部件451的第一导移部4511,而可使第一滑接部件451于第一承载具41的长孔411内作弧度曲线位移,调整单元还在第一承载具41的侧板外部且位于第一滑接部件451下方配置有复数个为滚轮的第二接配部件453,第二接配部件453并以外环面接触第一滑接部件451的第二导移部4512,也可使第一滑接部件451作弧度曲线位移,而第一接配部件452及第二接配部件453并具有限位作用,以避免第一滑接部件451上下晃动;再者,调整单元是在承载单元的第三承载具43下方固设装配有第二滑接部件454,第二滑接部件454的底面设有一呈弧型曲线的第三导移部4541,于顶面设有一呈弧型曲线的第四导移部4542,第二滑接部件454并位于第四承载具44的第二容置空间441,调整单元并于第四承载具44的内底面设有第三接配部件455,第三接配部件455是呈弧型曲线的弧面,并成型于第四承载具44,然该第三接配部件455也可为具弧面的块体,而装配于第四承载具44的内底面,本实施例的第三接配部件455具有与第三导移部4541相互配合的弧型曲线,第三接配部件455系接触贴合第三导移部4541,而使第四承载具44作弧度曲线位移,调整单元还在第四承载具44的侧板内面且位于第二滑接部件454上方配置有复数个为滚轮的第四接配部件456,第四接配部件456并以外环面接触第二滑接部件454的第四导移部4542,也可使第四承载具44作弧度曲线位移,第三接配部件455及第四接配部件456并具有限位作用,以避免第四承载具44上下晃动,由于第四接配部件456装配于第四承载具44,使第四承载具44利用第四接配部件456跨接于第二滑接部件454,而组装连结第三承载具43,以供装配作业具30。
再者,调整单元设置至少一调控具,以驱控滑接部件或承载具作动,更进一步,调整单元是在第一承载具41与第二承载具42之间设有第一调控具,以驱动第一滑接部件451及作业具30作第二方向(如Y方向)弧度摆动调整作业角度,也或于第三承载具43与第四承载具44之间设有第二调控具,以驱动第四承载具44及作业具30作第一方向(如X方向)弧度摆动调整作业角度,也或于第二承载具42与第三承载具43之间设有第三调控具,以驱动第三承载具43作水平方向弧度摆动调整作业角度;于本实施例中,调整单元包含第一调控具、第二调控具及第三调控具,第一调控具是在第一滑接部件451的外侧面以第一承架4571装配第一驱动件4572,并于第一承载具41的外侧面且相对第一驱动件4572的位置设有第一抵挡部件4573,该第一抵挡部件4573供第一驱动件4572顶抵,使第一驱动件4572带动第一滑接部件451、第二承载具42、第三承载具43
、第四承载具44及作业具30作Y方向弧度摆动调整作业角度,还在第二承载具42上的第一滑接部件451与第一承载具41之间设有第一弹簧4574,以带动第二承载具42及第一滑接部件451复位,于本实施例中,是在第一承架4571与第一承载具41之间设有第一弹簧4574;第二调控具是在第四承载具44的第一侧以第二承架4581装配第二驱动件4582,并于第二滑接部件454相对第二驱动件4582的位置设有第二抵挡部件4583,以供第二驱动件4582顶抵,使第二驱动件4582带动第四承载具44及作业具30作X方向弧度摆动调整作业角度,还在第四承载具44与第三承载具43上的第二滑接部件454间设有第二弹簧4584,以带动第四承载具44复位,于本实施例中,是在第四承载具44的第二侧设有第三承架4585,并于第三承架4585与第二滑接部件454之间设有第二弹簧4584;第三调控具是在第二承载具42装配有第三驱动件4591,第三驱动件4591包含马达及螺杆螺座组,其螺座装配一推块4592,第三调控具并于第三承载具43设有一供推块4592顶推的第三抵挡部件4593,使第三驱动件4591经由推块4592及第三抵挡部件4593而带动第三承载具43、第四承载具44及作业具30作水平弧度位移调整作业角度,还在第二承载具42与第三承载具43之间设有第三弹簧4594,以带动第三承载具43及作业具30复位。
请参阅图4,当移动臂20因相关元件的组装累积误差而使作业具30呈Y方向倾斜摆置作业角度,于调整校正时,系操控调整器40的第一调控具的第一驱动件4572,令第一驱动件4572的杆体顶抵第一抵挡部件4573,由于第一抵挡部件4573固设于第一承载具41而不会位移,使得第一驱动件4572反向受力而作Y方向位移,第一驱动件4572即经由第一承架4571带动第一滑接部件451位移,第一滑接部件451利用顶面呈弧型曲线的第一导移部4511搭配第一接配部件452的呈弧型曲线的第一接触面4521,而可于第一承载具41的长孔411内作Y方向弧度曲线位移,第一滑接部件451并同时利用底面呈弧型曲线的第二导移部4512搭配第二接配部件453,使第一滑接部件451平稳位移,第一滑接部件451即带动第二承载具42同步作Y方向弧度曲线位移,第二承载具42经由第三承载具43、第二滑接部件454及第四承载具44而带动作业具30作Y方向弧度曲线位移,进而调整校正作业具30的Y方向摆置角度,以避免作业具30作Y方向倾斜摆置,达到提升作业具30Y方向摆置角度精准性的实用效益。
请参阅图5,当移动臂20因相关元件的组装累积误差而使作业具30呈X方向倾斜摆置作业角度,于调整校正时,系操控调整器40的第二调控具的第二驱动件4582,令第二驱动件4582的杆体顶抵于第二滑接部件454的第二抵挡部件4583,由于第二滑接部件454固设于第三承载具43而不会位移,使得第二驱动件4582反向受力而作X方向位移,第二驱动件4582经由第二承架4581带动第四承载具44位移,第二滑接部件454利用底面的呈弧型曲线的第三导移部4541搭配第四承载具44内底面呈弧型曲线的第三接配部件455,使得第四承载具44作X方向弧度曲线位移,第二滑接部件454并同时利用顶面呈弧型曲线的第四导移部4542搭配第四接配部件456,使第四承载具44平稳带动作业具30同步作X方向弧度曲线位移,进而调整校正作业具30的X方向摆置角度,以避免作业具30作X方向倾斜摆置,达到提升作业具30X方向摆置角度精准性的实用效益。
请参阅图6、图7,本发明作业机构10可应用于晶片61与软性电路板62的热压合作业,作业机构10的作业具30是一具温控器50、吸嘴31及压接部32的热压合具,并以吸嘴31拾取待热压合的晶片61,由于晶片61的复数个接脚必须准确对位于下热压合座70所承载的软性电路板62的电性接点;因此,于调整作业具30拾取的晶片61的水平摆置作业角度时,系操控调整器40的第三调控具的第三驱动件4591,第三驱动件4591驱动推块4592向前位移,推块4592顶推第三承载具43的第三抵挡部件4593作动,第三承载具43即以轴杆431为旋转中心而于第二承载具42的下方作水平旋转,由于第二滑接部件454、第四承载具44及作业具30系连结装配于第三承载具43的下方,使得第三承载具43经由第二滑接部件454及第四承载具44而带动作业具30作水平旋转,以调整作业具30拾取的晶片61的水平摆置作业角度,使晶片61的复数个接脚准确对位软性电路板62的电性接点,作业机构10的移动臂20带动作业具30、调整器40及晶片61作Z方向向下位移,使晶片61的复数个接脚热压固接于软性电路板62的电性接点,达到提升热压作业精准度及品质的实用效益。
请参阅第1、2、3、8图,系本发明作业机构10应用于电子元件作业设备,电子元件作业设备包含机台80、供料装置90、作业机构10、输送装置100及中央控制装置(图未示出),于本实施例中,电子元件作业设备是热压合作业设备,更包含取像装置110;该供料装置90配置于机台80,并设有至少一供料承置器91,以承置待作业的电子元件,于本实施例中,供料承置器91系承置至少一载框模块63,该载框模块63系承置至少一为晶片61的待压合电子元件;该输送装置100配置于机台80,并设有至少一移料器,以移载待作业的电子元件,于本实施例中,输送装置100系以第一移料器101于供料装置90的供料承置器91取出载框模块63,并将一具有待压合晶片61的载框模块63载送至一承载台102,输送装置100系以第二移料器103于承载台102上的载框模块63取出待压合晶片61,并将待压合晶片61移载至换料位置,本发明的作业机构10配置于机台80,并设有移动臂20、作业具30及调整器40,该调整器40包含承载单元及调整单元,作业机构10系以作业具30对电子元件执行预设作业,以及利用调整器40带动作业具30作至少一方向弧度摆动调整作业角度,于本实施例中,当调整器40已带动作业具30作X-Y方向弧度摆动调整校正作业角度后,作业机构10系以移动臂20带动作业具30及调整器40作X-Y方向位移至换料位置,再带动作业具30作Z方向位移于第二移料器103吸取待压合晶片61,于取料后,作业机构10的移动臂20带动作业具30及调整器40作X-Y方向反向位移至热压合位置,输送装置100系以一输送器104输送另一为软性电路板62的电子元件至热压合位置,该取像装置110装配于机台80,并设置至少一取像器,以取像电子元件,于本实施例中,取像装置110系以一作双向取像的取像器111取像晶片61及软性电路板62,并将取像资料传输至中央控制装置,中央控制装置依取像资料,而控制作业机构10调整晶片61的水平摆置角度,作业机构10即以调整器40带动作业具30及晶片61调整水平摆置作业角度,使晶片61的复数个接脚准确对位于软性电路板62的电性接点而执行热压合作业,于完成热压合作业后,输送装置100的输送器104输出具晶片61的软性电路板62;该中央控制装置用以控制及整合各装置作动,以执行自动化作业,达到提升作业效能的实用效益。
- 电子元件作业机构及其应用的作业设备
- 电子元件搬移机构及其应用的作业设备