材料试验机及材料试验机的控制方法
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及一种材料试验机及材料试验机的控制方法。
背景技术
先前,在材料试验机中,为了维持试验条件来执行材料试验,而进行试验条件(对试验对象赋予的试验力、拉伸试验中的拉伸速度等)的反馈控制(例如,参照专利文献1)。专利文献1中所记载的材料试验机包括测定对试验片赋予的试验力的负荷传感器(loadcell),对试验片赋予使试验力定速增加至目标值的拉伸载荷,然后在使试验力保持为目标值的条件下反馈控制试验力。
现有技术文献
专利文献
专利文献1:日本专利特开2018-96841号公报
发明内容
[发明所要解决的问题]
在进行根据试验条件而设定的条件的反馈控制的情况下,理想的是提高反馈增益而使响应性良好。然而,若提高反馈增益,则与条件要素的测定中所使用的传感器的检测信号重叠的噪声成分也被放大,因此控制容易变得不稳定。为了减少噪声成分,也采用了经由低通滤波器来输入传感器的检测信号的结构,但在所述情况下,存在如下不良情况:因由低通滤波器引起的检测信号的延迟而控制的稳定性降低。
本发明是鉴于所述背景而成,其目的在于提供一种可提高响应性及稳定性来进行试验条件的反馈控制的材料试验机及材料试验机的控制方法。
[解决问题的技术手段]
第一发明包括:负荷机构,对试验对象赋予负荷;第一监测量测定部,测定作为根据所述负荷而在所述试验对象或所述负荷机构中产生的物理量的变化的第一监测量;第二监测量测定部,测定作为成为试验目标的物理量的第二监测量;监测量转换部,依据表示所述试验对象或所述负荷机构中的所述第一监测量与所述第二监测量的相关性的相关条件,而将由所述第一监测量测定部测定的所述第一监测量转换为视作所述第二监测量的测定值的第二监测量推定值;以及材料试验控制部,基于所述第二监测量推定值,来决定用以减少所述试验对象中的实际的所述第二监测量与对应于试验条件的目标第二监测量的偏差的、对于所述负荷机构的操作量,并执行所述试验对象的材料试验。
根据第一发明,第二发明中,所述材料试验控制部基于由所述第二监测量测定部所得的测定值与所述目标第二监测量的偏差的积分值、及所述第二监测量推定值,来决定所述操作量。
根据第二发明,第三发明中,所述第一监测量测定部测定对所述试验对象施加的所述负荷机构的移动量作为所述第一监测量,所述第二监测量测定部测定通过所述负荷而对所述试验对象赋予的试验力作为所述第二监测量,所述相关条件是作为所述试验力相对于对所述试验对象施加的所述负荷机构的移动量的增减量的控制刚性,所述监测量转换部通过将所述控制刚性乘以由所述第一监测量测定部所得的测定值,而将由所述第一监测量测定部测定的所述负荷机构的移动量转换为视作对所述试验对象赋予的所述试验力的推定值的所述第二监测量推定值。
根据第三发明,第四发明包括控制刚性算出部,所述控制刚性算出部在所述材料试验的执行中,基于规定期间内的由所述第一监测量测定部所得的测定值与由所述第二监测量测定部所得的测定值的相关性,来算出所述控制刚性。
根据第三发明或第四发明,第五发明中,所述负荷机构具有:一对夹具,夹住所述试验对象;以及头部,与所述一对夹具的其中一者连接,通过滚珠丝杠的旋转而在变更所述一对夹具的间隔的方向上滑动;所述第一监测量测定部具有:编码器,安装于所述滚珠丝杠上,每当所述滚珠丝杠旋转规定角度时输出一个脉冲;以及计数器,对自所述编码器输出的所述脉冲进行计数;并且基于所述计数器的计数值来测定所述负荷机构的移动量。
第六发明是一种材料试验机的控制方法,其通过如下材料试验机来执行,所述材料试验机包括:负荷机构,对试验对象赋予负荷;第一监测量测定部,测定作为根据所述负荷而在所述试验对象或所述负荷机构中产生的物理量的变化的第一监测量;第二监测量测定部,测定作为成为试验目标的物理量的第二监测量;以及控制装置;并且所述材料试验机的控制方法包括:监测量转换步骤,所述控制装置依据表示所述试验对象或所述负荷机构中的所述第一监测量与所述第二监测量的相关性的相关条件,而将由所述第一监测量测定部测定的所述第一监测量转换为视作所述第二监测量的测定值的第二监测量推定值;以及材料试验控制步骤,所述控制装置基于所述第二监测量推定值,来决定用以减少所述试验对象中的实际的所述第二监测量与规定的目标第二监测量的偏差的、对于所述负荷机构的操作量,并执行所述试验对象的材料试验。
再者,在本说明书中包含2018年12月13日提出申请的日本专利申请/特愿2018-233186号的全部内容。
[发明的效果]
根据第一发明,通过监测量转换部并依据表示试验对象中的第一监测量与第二监测量的相关性的相关条件,而将由第一监测量测定部测定的第一监测量转换为视作第二监测量的测定值的第二监测量推定值。然后,通过材料试验控制部并基于第二监测量推定值,来决定用以减少试验对象中的实际的第二监测量与对应于试验条件的目标第二监测量的偏差的、对于负荷机构的操作量。在所述情况下,当难以抑制噪声的影响来测定第二监测量时,通过使用由耐噪声性高的第一监测量测定部所得的测定值,可抑制噪声的影响来进行第二监测量的反馈控制。由此,可提高响应性及稳定性来进行作为试验条件的第二监测量的反馈控制。
根据第二发明,通过基于由第二监测量测定部所得的测定值与目标第二监测量的偏差来决定负荷机构的操作量,从而可减低利用监测量转换部将第一监测量的测定值转换为第二监测量推定值时的误差的影响,并提高反馈控制的精度。
根据第三发明,通过监测量转换部,作为由第一监测量测定部测定的负荷机构的移动量的第一监测量通过乘以试验对象或负荷机构的控制刚性而被转换为视作第二监测量的测定值的第二监测量推定值。然后,通过材料试验控制部,基于第二监测量推定值来决定负荷机构的操作量,由此可进行对试验对象赋予的试验力的反馈控制。
根据第四发明,通过控制刚性算出部,在材料试验的执行中,基于规定期间内的由第一监测量测定部所得的测定值与由第二监测量所得的测定值的相关性,来算出试验对象的控制刚性。由此,在材料试验的执行中试验对象的控制刚性发生变化的情况下,可减少第二监测量推定值的转换误差。
根据第五发明,使用编码器来测定负荷机构的移动量,所述编码器安装于使与夹着试验对象的夹具连接的头部滑动的滚珠丝杠上。由此,可排除自驱动滚珠丝杠的马达等驱动源至滚珠丝杠的传递机构中的松动或齿隙的影响,而精度良好地测定负荷机构的移动量。
根据第六发明,通过利用材料试验机来实施第六发明的方法,可获得与第一发明相同的效果。
附图说明
图1是示意性表示本发明的实施方式的材料试验机的结构的图。
图2是控制系统的方块图。
图3是试验力的反馈控制的流程图。
图4是利用先前的材料试验机进行拉伸试验时的测定图表。
图5是利用本实施方式的材料试验机进行拉伸试验时的测定图表。
具体实施方式
[1.材料试验机的结构]
以下,参照图式,对本发明的实施方式进行说明。
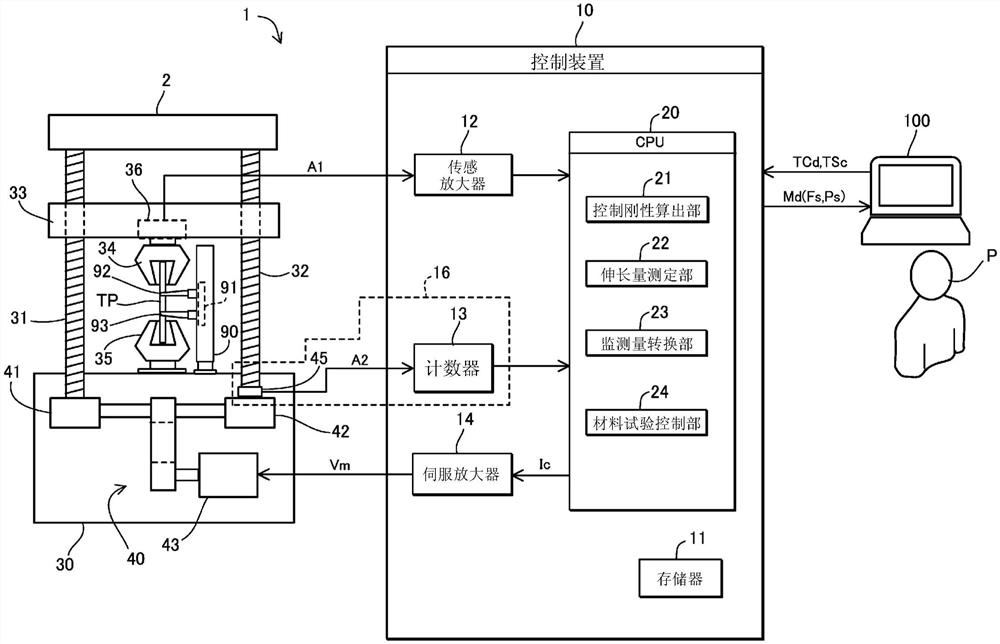
图1是示意性表示本实施方式的材料试验机1的结构的图。
本实施方式的材料试验机1是所谓的拉伸试验机,且为对决定对于拉伸或剪切等外力的耐久性等的材料固有的机械性质进行试验的试验机。
材料试验机1包括:拉伸试验机主体2,对作为试验对象的材料的试验片TP赋予作为负荷的试验力来进行拉伸试验;以及控制装置10,对基于试验机主体2的拉伸试验动作进行控制。在图1中示出在测定后述的试验片TP的应变时使用的伸长计90。伸长计90是不依赖于使用者的手工作业地进行试验片TP的把持与释放的自动伸长计,且包括把持试验片TP并与试验片TP一起位移的上臂92及下臂93、以及检测上臂92及下臂93的位移的应变仪91。
[2.试验机主体的结构]
试验机主体2包括:工作台30;一对螺杆31、32,在工作台30上竖立设置为能够以朝向铅垂方向的状态旋转;十字头33,能够沿着这些螺杆31、32移动;负荷机构40,使所述十字头33移动而对试验片TP施加负荷;以及负荷传感器36。负荷传感器36是测定作为实际作用于试验片TP的拉伸载荷的试验力,并将表示所测定的试验力的试验力测定信号A1输出至控制装置10的传感器。试验力相当于本发明的第二监测量,负荷传感器36相当于本发明的第二监测量测定部。再者,也可设为使螺杆为一根的结构。
一对螺杆31、32包含滚珠丝杠,十字头33经由省略图示的螺母而与各螺杆31、32连结。负荷机构40包括:蜗杆减速机41、42,与各螺杆31、32的下端部连结;以及伺服马达43,与各蜗杆减速机41、42连结。另外,在螺杆31上装配有编码器45,编码器45生成每当螺杆31旋转规定角度时输出一个脉冲的位置测定信号A2。
负荷机构40经由蜗杆减速机41、42而向一对螺杆31、32传递伺服马达43的旋转,各螺杆31、32同步地旋转,由此十字头33沿着螺杆31、32升降。
在十字头33上附设有用以把持试验片TP的上端部的上夹具34,在工作台30上附设有用以把持试验片TP的下端部的下夹具35。试验机主体2在进行拉伸试验时,在利用上夹具34把持试验片TP的上端部,同时利用下夹具35把持试验片TP的下端部的状态下,通过基于控制装置10的控制而使十字头33上升,由此对试验片TP赋予试验力。根据上夹具34的上下滑动而变更上夹具34与下夹具35的间隔。上夹具34及下夹具35相当于本发明的一对夹具,十字头33相当于连接有夹具的本发明的头部。
[3.控制装置的结构]
控制装置10进行试验机主体2的运行的控制与试验状况的测定。在控制装置10上连接有作为外部控制装置的个人计算机(Personal Computer,PC)100,PC 100在与控制装置10之间进行通信,来进行拉伸试验的试验条件的设定、拉伸试验的开始的指示、拉伸试验的进展状况的监视及测定数据的显示与分析等。
控制装置10是由中央处理器(Central Processing Unit,CPU)20、存储器11、未图示的接口电路等构成的电子电路单元。控制装置10包括:传感放大器12,对自负荷传感器36输出的试验力测定信号A1进行放大;计数器13,对自编码器45输出的位置测定信号A2的脉冲数进行计数;以及伺服放大器14,向伺服马达43供给驱动电流。
由编码器45与计数器13构成测定试验片TP的伸长量的位移量测定部16。伸长量相当于本发明的第一监测量,位移量测定部16相当于本发明的第一监测量测定部。伺服放大器14生成与自CPU 20输入的电流指示Ic对应的驱动电压,并输出至伺服马达43。
控制装置10通过由CPU 20执行存储器11中所保存的材料试验机1的控制程序,而作为控制刚性算出部21、伸长量测定部22、监测量转换部23及材料试验控制部24发挥功能。控制刚性算出部21在拉伸试验的执行中,基于由负荷传感器36测定的试验力与由位移量测定部16测定的位移量,来算出作为试验力相对于位移量(上夹具34的移动量)的增减量的控制刚性。控制刚性相当于本发明的相关条件。由位移量测定部16与伸长量测定部22构成本发明的第一监测量测定部。
伸长量测定部22自由位移量测定部16测定的位移量中减去材料试验开始时的位移量来算出试验片TP的伸长量。伸长量相当于本发明的移动量及第一监测量。监测量转换部23将由控制刚性算出部21算出的控制刚性乘以由伸长量测定部22算出的试验片TP的伸长量,而将伸长量转换为视作对试验片TP赋予的试验力的测定值的试验力推定值。试验力推定值相当于本发明的第二监测量推定值。材料试验控制部24执行对于试验片TP的拉伸试验的处理。由监测量转换部23执行的处理相当于本发明的材料试验机的控制方法中的监测量转换步骤。由材料试验控制部24执行的处理相当于本发明的材料试验机的控制方法中的材料试验控制步骤。
控制装置10接收自PC 100发送的试验条件命令TCd、试验开始命令TSc等。材料试验控制部24在接收到试验开始命令TSc时,依据由试验条件命令TCd指示的试验条件来执行拉伸试验。通过试验条件命令TCd来指示原点调整、试验力、拉伸速度等试验条件。
材料试验控制部24在拉伸试验的执行中,基于由传感放大器12放大的试验力测定信号A1,来识别对试验片TP赋予的试验力的测定值(以下,记为测定试验力Fs)。另外,材料试验控制部24基于由位移量测定部16测定的试验片TP的位移量,来识别自拉伸试验开始时起的试验片TP在上方向上的位移量(伸长量,以下记为测定伸长量ΔPs)。然后,材料试验控制部24将包含测定试验力Fs与测定伸长量ΔPs的测定数据Md发送至PC 100。
PC 100获取通过使用者P的操作而设定的拉伸试验的试验条件,并将试验条件命令TCd发送至控制装置10。另外,PC 100受理通过使用者P的操作而指示的拉伸试验的开始,并将试验开始命令TSc发送至控制装置10。进而,PC 100接收自控制装置10发送的测定数据Md,并显示表示测定试验力Fs与测定伸长量ΔPs的监测画面。
[4.控制系统的结构]
参照图2来说明对赋予至试验片TP的试验力进行反馈控制的结构。图2是本实施方式的试验力的控制系统的方块图,材料试验控制部24进行基于图2所示的方块图的I-PD控制(比例微分先行型比例积分微分(Proportional Integral Differential,PID)控制),来决定对于伺服马达43的操作量u(t)。材料试验控制部24在每个预先设定的控制周期中更新操作量u(t)。图2中的t表示控制周期的执行时间点。
图2的方块图包含第一处理方块50,所述第一处理方块50进行与各控制周期中的目标试验力Fc(t)减去测定试验力Fs(t)所得的偏差e
在第一处理方块50中,通过第一减法器51而自目标试验力Fc(t)中减去测定试验力Fs(t)来算出偏差e
在第二处理方块60中,通过监测量转换器61而将测定伸长量ΔPs(t)转换为推定试验力Fe(t)。然后,将推定试验力Fe(t)输入至第二比例器62及第二微分器63,通过第二加法器64而将第二比例器62与第二微分器63的输出相加,从而算出第二处理值C2。基于图2的方块图的传递函数由以下式(1)表示。
[数式1]
其中,u(t):操作量、e
[5.操作量的决定处理]
依据图3所示的流程图,对将赋予至试验片TP的试验力的目标值设定为拉伸试验的实验条件时所执行的试验力的反馈控制进行说明。控制装置10在拉伸试验的执行中,在每个规定的控制周期中执行基于图3所示的流程图的处理,来对赋予至试验片TP的试验力进行反馈控制。
在图3的步骤S1中,控制刚性算出部21根据自负荷传感器36输出的试验力测定信号A1,来测定对试验片TP赋予的试验力(测定试验力Fs(t))。接着,在步骤S2中,控制刚性算出部21基于位移量测定部16的计数器13的计数值,来测定试验片TP的位移量(测定位移量Ps(t))。在接下来的步骤S3中,控制刚性算出部21根据以下式(2)来算出试验片TP的控制刚性Stiff(t)。
[数式2]
其中,Stiff:试验片TP的控制刚性、t~t-1:试验力及位移量的变化相应的测定期间、相当于本发明的规定期间。
在所述式(2)中,基于上次的控制周期中的测定值与本次的控制周期中的测定值的变化量,来算出在本次的控制周期中使用的控制刚性Stiff(t)。作为其他结构,也可基于最近的多个控制周期中的测定值的变化量,来算出在本次的控制周期中使用的控制刚性Stiff(t)。或者,也可将在最近的多个各控制周期中基于测定值的变化量而算出的控制刚性的平均值作为在本次的控制周期中使用的控制刚性Stiff(t)。
另外,在材料试验执行中的试验片TP的控制刚性的变化为能够容许的范围的情况下,也可将控制刚性设定为一定值。或者,在能够基于试验片TP的特性等而假定材料试验执行中的试验片TP的控制刚性的变化时,也可基于预先设定的控制刚性的变化模式,来设定本次的控制周期中的控制刚性Stiff(t)。
在接下来的步骤S4中,伸长量测定部22自在步骤S2中所测定的本次的控制周期中的测定位移量Ps(t)中减去拉伸试验开始时的测定位移量Ps(t
在接下来的步骤S6中,材料试验控制部24自目标试验力Fc(t)中减去测定试验力Fs(t)来算出偏差e
接着,在步骤S8中,材料试验控制部24向伺服放大器14输出对应于操作量u(t)的电流指示Ic。由此,调整伺服马达43的输出转矩,以使对试验片TP赋予的试验力与目标试验力Fc(t)的偏差减少,从而反馈控制试验力。
[6.由本发明所得的效果的验证]
根据图4及图5所示的拉伸试验的测定图表,来说明将本发明应用于材料试验机来执行拉伸试验时的效果。图4及图5示出如图1所示那样将伸长计90安装于试验片TP上,并利用应变仪91测定拉伸试验执行时的试验片TP的应变(相当于伸长量)的试验数据。试验条件设定为将应变增加率(拉伸速度)设为一定的0.025(%/sec),根据所述试验条件,来设定使试验力定速增加的实施方式的目标试验力Fc(t)。
图4及图5中,将横轴设定为试验片TP的应变(%),将左纵轴设定为应变增加率(%/sec),将右纵轴设定为应力(N/mm
图4如先前的材料试验机中进行的那样,通过PID控制来反馈控制试验力,示出使由负荷传感器36测定的测定试验力Fs(t)与目标试验力Fc(t)的偏差e
相对于此,图5示出使用推定试验力Fe(t),对试验力进行反馈控制时的试验结果,所述推定试验力Fe(t)是利用所述本实施方式的结构转换基于由位移量测定部16测定的试验片TP的位移量的测定伸长量ΔPs(t)而得的。在图5中,用Fm2表示应力,用Pm2表示应变增加率,用R2表示试验片TP断裂的时间点。在图5中,相对于作为应变增加率的目标值的0.025(%/sec),基于伸长计90的测定值的应变增加率的变动幅度处于±2%左右,检验到试验力的反馈控制的精度提高。
[7.其他实施方式]
在所述实施方式中,如图2所示的方块图所示,将自目标试验力Fc(t)中减去测定试验力Fs(t)所得的偏差e
在所述实施方式中,如图2所示的方块图所示,通过I-PD控制来进行试验力的反馈控制。作为其他结构,也可通过一般的PD控制或PID控制来进行试验力的反馈控制。在所述情况下,成为如下结构:将自目标试验力Fc(t)中减去推定试验力Fe(t)所得的偏差输入至第二比例器62及第二微分器63中。另外,在控制刚性Stiff的算出误差不成问题的情况下,也可设为省略了与目标试验力Fc(t)和测定试验力Fs(t)的偏差e
在所述实施方式中,示出如下例:将试验片TP的伸长量作为本发明的第一监测量,将对试验片TP赋予的试验力作为本发明的第二监测量,而对试验力进行反馈控制。第一监测量与第二监测量的组合并不限于此,若与自第二监测量的测定中所使用的测定器输出的测定信号重叠的噪声的影响成为问题,且第一监测量的测定器的耐噪声性高于第二监测量的测定器,则可获得本发明的效果。例如,第二监测量可为转矩、压力、位移等。作为噪声容易重叠的测定器,除负荷传感器等力传感器以外,还可列举测定微小位移的应变仪式的夹子仪等。
在所述实施方式中,通过安装于螺杆32上的编码器45来测定试验片TP的位移量,但也可通过位移传感器、测长传感器、线性仪、电位计等来测定位移量。另外,也可使用安装于伺服马达43上的编码器、线性标尺(线性编码器)等来测定位移量。作为线性标尺,可使用透过形光电式标尺、反射形光电式标尺、激光全息标尺、电磁感应式标尺等。
在所述实施方式中,使用伺服马达43作为负荷机构40的驱动源,但也可使用油压源等其他驱动源。在所述情况下,结合图2的方块图中的操作对象的近似式负荷机构的规格来设定。
在所述实施方式中,图1所示的功能方块是为了容易理解本申请发明而根据主要处理内容分类示出构成要素的概略图,也可根据处理内容而分类为更多的构成要素。另外,也可分类为一个构成要素执行更多的处理。
在所述实施方式中,作为本发明的材料试验机,示出进行拉伸试验的材料试验机1,但本发明可广泛应用于对试验对象赋予试验力来测定试验对象的物理量的变化的材料试验机。例如,可将本发明应用于进行压缩试验、弯曲试验、剥离试验等的材料试验机。
在所述实施方式中,由位移量测定部16与伸长量测定部22构成第一监测量测定部,并测定上夹具34的位移量作为第一监测量。作为其他结构,也可测定两个以上的物理量作为第一监测量。
[符号的说明]
1:材料试验机
2:试验机主体
10:控制装置
16:位移量测定部
20:CPU
21:控制刚性算出部
22:监测量转换部
23:材料试验控制部
36:负荷传感器
40:负荷机构
43:伺服马达
45:编码器
90:伸长计
100:PC
TP:试验片。
- 材料试验机以及材料试验机的控制方法
- 材料试验机及材料试验机的控制方法