智能物流用高可靠性环抱式物流箱抓取机械手及使用方法
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及环抱式物流箱抓取机械手技术领域,特别涉及智能物流用高可靠性环抱式物流箱抓取机械手及使用方法。
背景技术
智能物流是利用集成智能化技术,使物流系统能模仿人的智能,具有思维,感知,学习,推理判断和自行解决物流中某些问题的能力。是利用条形码、射频识别技术、传感器、全球定位系统等先进的物联网技术通过信息处理和网络通信技术平台广泛应用于物流业运输、仓储、配送、包装、装卸等基本活动环节,实现货物运输过程的自动化运作和高效率优化管理,提高物流行业的服务水平,降低成本,减少自然资源和社会资源消耗。
物联网为物流业将传统物流技术与智能化系统运作管理相结合提供了一个很好的平台,进而能够更好更快地实现智能物流的信息化、智能化、自动化、透明化、系统的运作模式。智能物流在实施的过程中强调的是物流过程数据智慧化、网络协同化和决策智慧化。物流箱抓取机械手是一种将物流箱从仓储货架转移至物流配送机器人货架的一种转运装置,目前的物流配送转运机器人大多通过带式转运机构对物流箱底部进行承托。
现有专利(公告号:CN113814964B)公开了智能物流用高可靠性环抱式物流箱抓取机械手及使用方法,涉及智能物流用高可靠性环抱式物流箱抓取机械手。物流箱顶部的四边均设置有齿条结构,该抓取机械手包括Y方向位移机构、Z方向位移机构、X方向位移机构、旋转驱动机构和两个相对设置的夹持单元,所述Z方向位移机构设于Y方向位移机构的输出端上;所述X方向位移机构设于Z方向位移机构的输出端上,所述旋转驱动机构设于Z方向位移机构的输出端上,所述旋转驱动机构的输出端与X方向位移机构传动连接。发明人在实现该方案的过程中发现现有技术中存在如下问题没有得到良好的解决:该装置在夹持物流箱时,物流箱本身可能存在凹陷变形,夹持物流箱稳定性有限,仍存在夹持掉落的可能,该装置夹持物流箱时Y方向座体时刻保持受力状态,所承受的扭力较大,重心偏移较大,对承载物体的要求较高,安装较为麻烦;该装置夹持物体的活动范围较为狭隘,灵活性不足。
发明内容
本发明的主要目的在于提供智能物流用高可靠性环抱式物流箱抓取机械手及使用方法,可以有效解决背景技术中的问题。
为实现上述目的,本发明采取的技术方案为:
智能物流用高可靠性环抱式物流箱抓取机械手,包括基座,所述基座的顶端表面固定安装有电动转台,所述电动转台的顶端表面固定安装有两个下转动件,两个所述下转动件上均转动安装有第一摆臂,两根所述第一摆臂远离下转动件的一端之间转动安装有第二摆臂,所述第二摆臂远离第一摆臂的一端转动安装有上转动件,所述上转动件固定连接有具有夹持物流箱功能的夹持机构,所述夹持机构的两侧表面均安装有具有绑紧物流箱功能的绑带机构,所述基座的顶面位于物流箱的正下方固定安装有支撑柱,所述支撑柱的顶端表面固定安装有承托台。
优选的,所述夹持机构包括剪叉臂组件、固定杆、夹持液压缸和两个框架,两个所述框架之间安装有剪叉臂组件,两个所述框架的底端均固定安装有夹板,所述上转动件固定安装靠近的框架一侧表面。
优选的,所述剪叉臂组件的中部固定安装有固定杆,所述固定杆上转动安装有夹持液压缸,所述夹持液压缸远离固定杆的一端转动安装在框架的一侧壁外表面底部。
优选的,两块所述夹板相邻的一侧表面四角处均固定安装有防滑橡胶夹具。
优选的,所述框架的一侧表面固定安装有支撑架,所述支撑架上固定安装有相机,八个所述防滑橡胶夹具之间夹持有物流箱,所述物流箱的顶面设有识别牌,所述相机朝向识别牌方位。
优选的,所述绑带机构包括绑带、横杆、电动收卷器、头部件、尾部件和两根气弹簧,两根所述气弹簧均固定安装在任一夹板的一侧壁外表面,所述头部件固定安装在余下一块夹板的一侧壁外表面,所述夹板的一侧壁外表面位于两根气弹簧之间固定安装有电动收卷器,所述电动收卷器上收卷有绑带,两根所述气弹簧的伸缩端端面之间固定安装有横杆,所述头部件和尾部件之间连接有若干个依次串联的转动机构,所述绑带远离电动收卷器的一端固定连接在头部件上,所述尾部件一侧表面固定连接绑带表面,所述横杆位于绑带内部。
优选的,所述转动机构包括贯穿柱、转动块、限制板和两块条状连接块,两块所述条状连接块之间固定安装有贯穿柱,两块所述条状连接块远离贯穿柱的一端之间转动安装有转动块,所述转动块和条状连接块的转动轴处安装有扭簧,两块所述条状连接块同一侧表面固定安装有限制板,所述转动块与条状连接块的转动夹角为度-度,所述贯穿柱固定贯穿在相邻的一个转动块中。
优选的,所述电动转台的顶面靠近两个下转动件位置均固定安装有限制块。
优选的,所述电动转台的顶面转动安装有第一液压缸,两根所述第一摆臂之间固定安装有第一固定柱和第二固定柱,所述第一液压缸远离电动转台的一端转动安装在第一固定柱上,所述第二固定柱上安装有第二液压缸,所述第二液压缸远离第二固定柱的一端转动安装在第二摆臂的一侧表面,所述第二摆臂靠近上转动件的一侧表面转动安装有第三液压缸,所述第三液压缸远离第二摆臂的一端转动安装有第三固定柱,所述第三固定柱的两端均固定安装有第三摆臂,两根所述第三摆臂分别固定安装在临近框架的顶部两端。
智能物流用高可靠性环抱式物流箱抓取机械手的使用方法,所述物流箱抓取机械手的使用方法如下:
第一步,基座的底部固定安装可移动承载车上,控制可移动承载车携带装置移动到运输物流车辆附近。
第二步,通过控制电动转台、第一液压缸、第二液压缸和第三液压缸,可实现夹持机构的多方位转动,调整使得运输物流车辆上的物流箱位于两块夹板之间。
第三步,控制夹持液压缸伸长可使得两块框架相互靠近,使得底部的两块夹板上的防滑橡胶夹具夹持住物流箱,物流箱位于两根绑带之间。
第四步,两侧的电动收卷器收紧,使得两根绑带收紧捆绑住物流箱的两端表面。
第五步,绑带缩短推动横杆使得气弹簧缩短,同时转动机构贴合物流箱的外表面弯曲,实现物流箱的捆绑紧密。
第六步,通过控制电动转台、第一液压缸、第二液压缸和第三液压缸使得物流箱放置在承托台上,相机识别识别牌获取物流讯息,获取需要放置物流箱的货架讯息。
第七步,可移动承载车携带整个装置及物流箱移动到指定货架附近,通过控制电动转台、第一液压缸、第二液压缸和第三液压缸使得物流箱放置在货架上。
第八步,然后两个电动收卷器放松绑带,在气弹簧和转动机构中扭簧的作用力下绑带重新恢复到初始位置,完成物流箱的转运。
与现有技术相比,本发明具有如下有益效果:
1、通过两个框架之间均设有滑轨,剪叉臂组件与两个框架可实现伸缩和展开,控制夹持液压缸伸长可使得两块框架相互靠近,使得底部的两块夹板上的防滑橡胶夹具夹持住物流箱,实现对物流箱夹持固定,夹持较为稳定,配合承托台可在移动期间不会脱出夹持控制。
2、通过两侧的电动收卷器收紧,使得两根绑带收紧捆绑住物流箱的两端表面,绑带缩短推动横杆使得气弹簧缩短,同时转动机构贴合物流箱的外表面弯曲,实现物流箱的捆绑紧密,进一步提高夹持稳定性,避免物流箱运输途中掉落。
3、通过控制电动转台、第一液压缸、第二液压缸和第三液压缸,可实现夹持机构的多方位转动,活动空间较大,灵活性较高。
附图说明
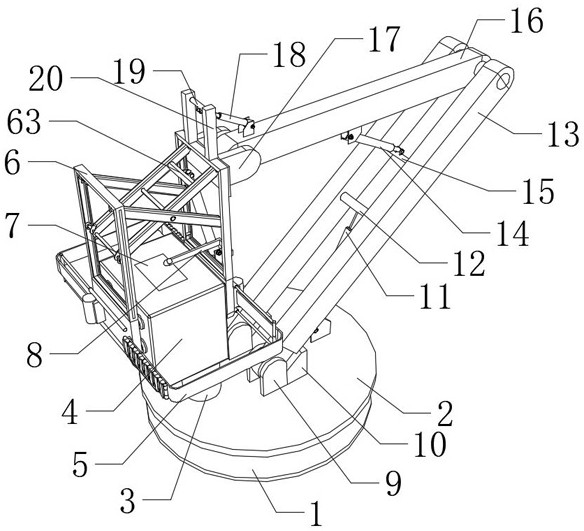
图1为本发明智能物流用高可靠性环抱式物流箱抓取机械手的整体结构示意图;
图2为本发明智能物流用高可靠性环抱式物流箱抓取机械手的正视结构示意图;
图3为本发明智能物流用高可靠性环抱式物流箱抓取机械手基座和第一摆臂的立体结构示意图;
图4为本发明智能物流用高可靠性环抱式物流箱抓取机械手夹持机构的立体结构示意图;
图5为本发明智能物流用高可靠性环抱式物流箱抓取机械手绑带机构的立体结构示意图;
图6为本发明智能物流用高可靠性环抱式物流箱抓取机械手转动机构的立体结构示意图。
图中:1、基座;2、电动转台;3、支撑柱;4、物流箱;5、绑带机构;51、绑带;52、气弹簧;53、电动收卷器;54、横杆;55、尾部件;56、头部件;57、转动机构;571、条状连接块;572、转动块;573、限制板;574、贯穿柱;6、夹持机构;61、框架;62、剪叉臂组件;63、固定杆;64、夹持液压缸;65、防滑橡胶夹具;66、夹板;7、识别牌;8、支撑架;9、下转动件;10、限制块;11、第一液压缸;12、第一固定柱;13、第一摆臂;14、第二液压缸;15、第二固定柱;16、第二摆臂;17、上转动件;18、第三液压缸;19、第三固定柱;20、第三摆臂;21、承托台;22、相机。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1-6所示,智能物流用高可靠性环抱式物流箱抓取机械手,包括基座1,基座1的顶端表面固定安装有电动转台2,电动转台2的顶端表面固定安装有两个下转动件9,两个下转动件9上均转动安装有第一摆臂13,两根第一摆臂13远离下转动件9的一端之间转动安装有第二摆臂16,第二摆臂16远离第一摆臂13的一端转动安装有上转动件17,上转动件17固定连接有具有夹持物流箱4功能的夹持机构6,夹持机构6的两侧表面均安装有具有绑紧物流箱4功能的绑带机构5,基座1的顶面位于物流箱4的正下方固定安装有支撑柱3,支撑柱3的顶端表面固定安装有承托台21。
本实施例中,夹持机构6包括剪叉臂组件62、固定杆63、夹持液压缸64和两个框架61,两个框架61之间安装有剪叉臂组件62,两个框架61的底端均固定安装有夹板66,上转动件17固定安装靠近的框架61一侧表面;剪叉臂组件62的中部固定安装有固定杆63,固定杆63上转动安装有夹持液压缸64,夹持液压缸64远离固定杆63的一端转动安装在框架61的一侧壁外表面底部;两块夹板66相邻的一侧表面四角处均固定安装有防滑橡胶夹具65;框架61的一侧表面固定安装有支撑架8,支撑架8上固定安装有相机22,八个防滑橡胶夹具65之间夹持有物流箱4,物流箱4的顶面设有识别牌7,相机22朝向识别牌7方位。
具体的,两个框架61之间均设有滑轨,剪叉臂组件62与两个框架61可实现伸缩和展开,控制夹持液压缸64伸长可使得两块框架61相互靠近,使得底部的两块夹板66上的防滑橡胶夹具65夹持住物流箱4,实现对物流箱4夹持固定。
本实施例中,绑带机构5包括绑带51、横杆54、电动收卷器53、头部件56、尾部件55和两根气弹簧52,两根气弹簧52均固定安装在任一夹板66的一侧壁外表面,头部件56固定安装在余下一块夹板66的一侧壁外表面,夹板66的一侧壁外表面位于两根气弹簧52之间固定安装有电动收卷器53,电动收卷器53上收卷有绑带51,两根气弹簧52的伸缩端端面之间固定安装有横杆54,头部件56和尾部件55之间连接有若干个依次串联的转动机构57,绑带51远离电动收卷器53的一端固定连接在头部件56上,尾部件55一侧表面固定连接绑带51表面,横杆54位于绑带51内部;转动机构57包括贯穿柱574、转动块572、限制板573和两块条状连接块571,两块条状连接块571之间固定安装有贯穿柱574,两块条状连接块571远离贯穿柱574的一端之间转动安装有转动块572,转动块572和条状连接块571的转动轴处安装有扭簧,两块条状连接块571同一侧表面固定安装有限制板573,转动块572与条状连接块571的转动夹角为0度-90度,贯穿柱574固定贯穿在相邻的一个转动块572中。
具体的,通过两侧的电动收卷器53收紧,使得两根绑带51收紧捆绑住物流箱4的两端表面,绑带51缩短推动横杆54使得气弹簧52缩短,同时转动机构57贴合物流箱4的外表面弯曲,实现物流箱4的捆绑紧密。
本实施例中,电动转台2的顶面靠近两个下转动件9位置均固定安装有限制块10;电动转台2的顶面转动安装有第一液压缸11,两根第一摆臂13之间固定安装有第一固定柱12和第二固定柱15,第一液压缸11远离电动转台2的一端转动安装在第一固定柱12上,第二固定柱15上安装有第二液压缸14,第二液压缸14远离第二固定柱15的一端转动安装在第二摆臂16的一侧表面,第二摆臂16靠近上转动件17的一侧表面转动安装有第三液压缸18,第三液压缸18远离第二摆臂16的一端转动安装有第三固定柱19,第三固定柱19的两端均固定安装有第三摆臂20,两根第三摆臂20分别固定安装在临近框架61的顶部两端。
具体的,通过控制电动转台2、第一液压缸11、第二液压缸14和第三液压缸18,可实现夹持机构6的多方位转动,活动空间较大,灵活性较高。
智能物流用高可靠性环抱式物流箱抓取机械手的使用方法,物流箱抓取机械手的使用方法如下:
第一步,基座1的底部固定安装可移动承载车上,控制可移动承载车携带装置移动到运输物流车辆附近。
第二步,通过控制电动转台2、第一液压缸11、第二液压缸14和第三液压缸18,可实现夹持机构6的多方位转动,调整使得运输物流车辆上的物流箱4位于两块夹板66之间。
第三步,控制夹持液压缸64伸长可使得两块框架61相互靠近,使得底部的两块夹板66上的防滑橡胶夹具65夹持住物流箱4,物流箱4位于两根绑带51之间。
第四步,两侧的电动收卷器53收紧,使得两根绑带51收紧捆绑住物流箱4的两端表面。
第五步,绑带51缩短推动横杆54使得气弹簧52缩短,同时转动机构57贴合物流箱4的外表面弯曲,实现物流箱4的捆绑紧密。
第六步,通过控制电动转台2、第一液压缸11、第二液压缸14和第三液压缸18使得物流箱4放置在承托台21上,相机22识别识别牌7获取物流讯息,获取需要放置物流箱4的货架讯息。
第七步,可移动承载车携带整个装置及物流箱4移动到指定货架附近,通过控制电动转台2、第一液压缸11、第二液压缸14和第三液压缸18使得物流箱4放置在货架上。
第八步,然后两个电动收卷器53放松绑带51,在气弹簧52和转动机构57中扭簧的作用力下绑带51重新恢复到初始位置,完成物流箱4的转运。
本申请中出现的电器元件在使用时均外接有电源和控制开关,涉及到电路和电子元器件和控制模块均为现有技术,本领域技术人员完全可以实现,无需赘言,本发明保护的内容也不涉及对于软件和方法的改进。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种智能碳纤维工业机械手抓取装置
- 智能物流用高可靠性环抱式物流箱抓取机械手及使用方法
- 智能物流用高可靠性环抱式物流箱抓取机械手及使用方法