核电站乏燃料贮存格架自动定位与缺陷检测系统及方法
文献发布时间:2023-06-19 10:08:35
技术领域
本发明属于核电站燃料操作与贮存系统调试与运维领域,更具体地说,本发明涉及一种核电站乏燃料贮存格架自动定位与缺陷检测系统及方法。
背景技术
乏燃料贮存格架是属于核电厂燃料操作与贮存系统(fuel handling andstorage system,简称PMC)的一项关键性设备,位于燃料厂房的乏燃料水池中,主要用于安全存放核燃料组件,机组换料期间也为执行燃料组件更换和相关组件互换操作提供平台与保护功能。
百万千瓦压水堆核电站一般要求水下可以贮存20个燃料循环所卸出的燃料加上一个完整堆芯的燃料,按照一个堆芯装载157根燃料组件计算,全部乏燃料贮存格架共有1206个贮存小室,图1即为某核电站机组乏燃料水池中的乏燃料贮存格架布置图。
贮存小室的内径尺寸一般为225×225mm,燃料组件下管座尺寸为214×214mm,当燃料组件放置于贮存小室后,总间隙仅为11mm。另外,贮存小室顶部的标高约为11.5m,而操作人员需站在标高20.2m的乏燃料水池吊车(乏燃料水池上方用于执行燃料组件水下操作的吊车设备,简称乏吊)走台上进行燃料操作。因此,为确保燃料操作准确性和提高操作效率,需要在工程建设阶段执行乏燃料贮存格架定位试验,确定每个贮存小室的编号和实际坐标,然后输入到乏吊控制系统的PLC(programmable logic controller,可编程序逻辑控制器)中。后续乏吊操作燃料组件时便可依靠PLC中的坐标参数实现精确定位,从而提升操作安全性和工作效率。
贮存小室坐标的确定是乏燃料贮存格架定位试验的核心内容,而这又是建立在贮存小室位置参数准确测量的基础上。以往执行乏燃料贮存格架定位试验,采用的均是干态条件下试验人员进入到乏燃料水池中的格架上方,使用塞尺等工具人工手动去测量乏燃料组件抓具(或模拟燃料组件)与贮存小室内壁的间隙值,然后以此为基础计算全部储存小室的坐标值。但是,人工手动格架定位试验方法存在着工作效率低下、测得数据精度和一致性较差的缺陷。而且,需操作人员下到乏燃料水池的格架上方,还存在着操作人员跌落和引入异物风险较高的问题。
另外,国内核电项目建设期间,已有多个项目的多台机组发现了乏燃料贮存格架存在锈蚀、裂纹等问题。为确保设备后期运行的安全性,需要对全部贮存小室进行缺陷检查和处理,机组在役运行阶段,同样需要定期对贮存小室的内部情况进行检查。对于贮存小室内部的缺陷,现在通常是采用防水型的通用工业内窥镜或水下摄像头组件进行检查,内窥镜和水下摄像头组件的水平与竖直方向的移动,均是由操作人员手动提着缆绳来完成,不仅操作起来非常不方便,而且工作效率较为低下,采集到的图像全部通过人工观察与判断,工作量巨大,需要占用大量的人力与工期资源。
有鉴于此,确有必要提供一种能够解决上述问题的核电站乏燃料贮存格架自动定位与缺陷检测系统及方法。
发明内容
本发明的目的在于:提供一种工作效率高、定位精度高且无安全风险的核电站乏燃料贮存格架自动定位与缺陷检测系统及方法,以解决现有技术中存在的问题。
为了实现上述发明目的,本发明提供了一种核电站乏燃料贮存格架自动定位与缺陷检测系统,其包括:
水下检测装置,适于乏燃料组件抓具抓取并且设有水下摄像头组件,水下摄像头组件用于拍摄贮存小室开口处的视频图像;
视频采集组件,用于采集水下摄像头组件拍摄的视频图像;
图像及数据处理系统,包括图像处理模块和测量计算模块;所述图像处理模块用于对水下摄像头组件拍摄的贮存小室开口处的视频图像进行处理,得到贮存小室的轮廓;所述测量计算模块用于根据所述贮存小室的轮廓定位出贮存小室中心,计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L,并结合乏燃料组件抓具的坐标计算得到贮存小室的实际坐标。
作为本发明核电站乏燃料贮存格架自动定位与缺陷检测系统的一种改进,所述测量计算模块包括:
小室中心定位单元,用于根据贮存小室的轮廓定位出贮存小室中心;
小室坐标计算单元,用于根据贮存小室中心坐标偏移量L和对应的乏燃料组件抓具坐标,计算得到贮存小室的实际坐标;
乏燃料贮存格架定位单元,用于根据定位试验选取的全部特征贮存小室的实际坐标,计算出全部贮存小室的实际坐标,实现整个乏燃料贮存格架的精确定位。
作为本发明核电站乏燃料贮存格架自动定位与缺陷检测系统的一种改进,所述贮存小室中心相对乏燃料组件抓具的坐标偏移量L为水下摄像头组件视野中心相对乏燃料组件抓具的坐标偏移量L1与贮存小室中心相对水下摄像头组件视野中心的坐标偏移量L2之和;
所述测量计算模块还包括偏移量计算单元,偏移量计算单元用于计算水下摄像头组件视野中心相对乏燃料组件抓具的坐标偏移量L1、计算贮存小室中心相对水下摄像头组件视野中心的坐标偏移量L2,并通过L=L1+L2计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L,其中,坐标偏移量L、L1、L2均包括横坐标和纵坐标。
作为本发明核电站乏燃料贮存格架自动定位与缺陷检测系统的一种改进,所述水下检测装置包括上管座、承重托盘、连接杆、水下摄像头组件及导向防撞缓冲装置;上管座与乏燃料组件抓具配合,承重托盘连接在上管座下方,并与连接杆的上端连接;水下摄像头组件通过连接锁紧件连接在连接杆的下端;摄像头组件外部设置有摄像头护套,导向防撞缓冲装置设于摄像头护套的周边以对其进行导向和保护。
作为本发明核电站乏燃料贮存格架自动定位与缺陷检测系统的一种改进,所述图像处理模块包括:
图像预处理单元,用于对视频图像进行图像增强、降噪预处理;
图像校正单元,用于通过全景视频技术将水下摄像头组件拍摄的视频图像校正为无畸变平面图形;
边缘分割与提取单元,用于对图像校正单元处理得到的贮存小室开口处的无畸变平面图形进行边缘分割与提取,得到贮存小室的轮廓。
作为本发明核电站乏燃料贮存格架自动定位与缺陷检测系统的一种改进,所述水下摄像头组件还用于拍摄贮存小室内壁的视频图像;所述图像处理模块还用于对水下摄像头组件拍摄的贮存小室内壁的视频图像进行处理,得到显示小室内壁缺陷情况的图片;所述测量计算模块还用于根据小室内壁缺陷情况的图片计算锈蚀区域大小及裂纹严重程度。
作为本发明核电站乏燃料贮存格架自动定位与缺陷检测系统的一种改进,所述图像处理模块包括:
图像预处理单元,用于对视频图像进行图像增强、降噪预处理;
图像校正单元,用于通过全景视频技术将水下摄像头组件拍摄的视频图像校正为无畸变平面图形并按照格架贮存小室高度方向进行拼接;
色差比较与识别单元,用于对图像校正单元处理得到的贮存小室内壁拼接后的无畸变平面图形进行色差比较与识别,得到显示小室内壁缺陷情况的图片。
作为本发明核电站乏燃料贮存格架自动定位与缺陷检测系统的一种改进,所述图像及数据处理系统还包括:
存储模块,用于存储水下摄像头组件拍摄的视频图像、图像处理模块的处理结果、测量计算模块的计算结果中的一种或几种;
显示模块,用于显示水下摄像头组件拍摄的视频图像、图像处理模块的处理结果、测量计算模块的计算结果中的一种或几种。
为了实现上述发明目的,本发明还提供了一种核电站乏燃料贮存格架自动定位试验方法,其包括以下步骤:
1)通过乏燃料组件抓具将水下检测装置抓取到乏燃料贮存格架上方,利用水下摄像头组件的全景摄像头拍摄贮存小室开口处的视频图像,并将对应的乏燃料组件抓具坐标输入到图像及数据处理系统中;
2)采集所述贮存小室开口处的视频图像,并对其进行处理,得到所述贮存小室的轮廓;
3)根据所述贮存小室的轮廓定位出贮存小室中心,计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L,结合乏燃料组件抓具的当前坐标计算得到贮存小室的实际坐标。
作为本发明核电站乏燃料贮存格架自动定位试验方法的一种改进,所述方法还包括以下步骤:
4)重复步骤1)~3),计算出定位试验选取的全部特征贮存小室的实际坐标,然后根据特征贮存小室的实际坐标计算出全部贮存小室的实际坐标,生成乏燃料贮存格架坐标文件并导入到乏吊的PLC中。
作为本发明核电站乏燃料贮存格架自动定位试验方法的一种改进,在通过乏燃料组件抓具将水下检测装置抓取到乏燃料贮存格架上方之前,还需要先在基准点分别使用乏燃料组件抓具和水下检测装置进行定位,确定整个坐标系统的零点位置,并且确定水下检测装置的水下摄像头组件视野中心与乏燃料组件抓具的坐标偏移量L1。
作为本发明核电站乏燃料贮存格架自动定位试验方法的一种改进,所述计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L的具体步骤为:计算贮存小室中心相对水下摄像头组件视野中心的坐标偏移量L2,结合水下摄像头组件视野中心相对乏燃料组件抓具的坐标偏移量L1,通过L=L1+L2计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L,其中,坐标偏移量L、L1、L2均包括横坐标和纵坐标。
作为本发明核电站乏燃料贮存格架自动定位试验方法的一种改进,所述贮存小室开口处的视频图像为360°全方位视频图像,所述步骤2)包括:对贮存小室开口处的视频图像进行图像增强、降噪预处理,然后通过全景视频技术将图像校正为无畸变平面图形,再对无畸变平面图形进行边缘分割与提取,得到所述贮存小室的轮廓。
为了实现上述发明目的,本发明还提供了一种核电站乏燃料贮存格架缺陷检测方法,其包括以下步骤:
a)通过乏燃料组件抓具将水下检测装置抓取到拟检查的贮存小室上方,并下降至所述贮存小室内部,利用水下摄像头组件拍摄贮存小室内壁的视频图像;
b)采集所述贮存小室内壁的视频图像,并对其进行处理与拼接,得到显示小室内壁缺陷情况的图片;
c)根据小室内壁缺陷情况的图片计算缺陷区域大小,并将小室内壁缺陷情况的图片以及计算结果在显示模块上显示,供操作人员进行目视检查,判断缺陷严重程度。
作为本发明核电站乏燃料贮存格架缺陷检测方法的一种改进,所述水下摄像头组件拍摄的贮存小室内壁的视频图像是360°全方位视频图像,对其进行处理的具体步骤为:
对贮存小室内壁的视频图像进行图像增强、降噪预处理,然后通过全景视频技术将图像校正为无畸变平面图形,并按照乏燃料贮存小室高度方向进行拼接,再对拼接后的图像形进行色差比较与识别,得到显示小室内壁缺陷情况的图片。
作为本发明核电站乏燃料贮存格架缺陷检测方法的一种改进,所述步骤b)~c)为实时在线处理,在进行步骤b)~c)时,还同时将水下摄像头组件拍摄的贮存小室内壁的视频图像输入存储模块存储,以供离线后进行复查或后期处理;离线后进行复查或后期处理时,如发现在线处理的异常或者疏漏,对在线处理的数据进行修正。
与现有的人工手动测量方法相比,本发明核电站乏燃料贮存格架自动定位与缺陷检测系统及方法至少在安全、质量和效率三个方面产生了较为巨大地进步,具体来说:
1)从安全角度看,本发明可以避免因操作人员下到乏燃料水池中的燃料格架上方目视查看定位而带来的引入异物及操作人员坠落等风险;
2)在工程调试阶段,本发明能够提供一种完成乏燃料贮存格架定位试验的自动化方法,确保结果的精确性和一致性,有效避免操作人员因工作疲劳及视觉误差导致的精度有限问题;
3)从进度角度看,PMC调试处于机组接料和装料等关键路径上,本发明成功解决了乏燃料贮存格架定位试验所需工时大的问题,可节约调试关键路径工期,对整个核电站的建造工期做出较大贡献;
4)在役机组格架更换后无需排水即可完成重新定位与校准工作,这将进一步提升在运机组的安全性;
5)本发明为水下检测贮存小室内壁缺陷提供了良好的手段,其操作简单,获取的实物信息实时清晰,并可以通过视频存储以方便回溯;
6)本发明能够对格架缺陷进行自动识别,可以在较大程度上减少操作人员的工作量,从而提升工作效率;
7)本发明将乏燃料贮存格架定位试验和缺陷检测需求较好的统一协调起来,实现一套装置具备多个功能,具有较好的经济性和实用性。
附图说明
下面结合附图和具体实施方式,对本发明核电站乏燃料贮存格架自动定位与缺陷检测系统及方法进行详细说明。
图1为某核电站机组乏燃料水池中的乏燃料贮存格架布置图。
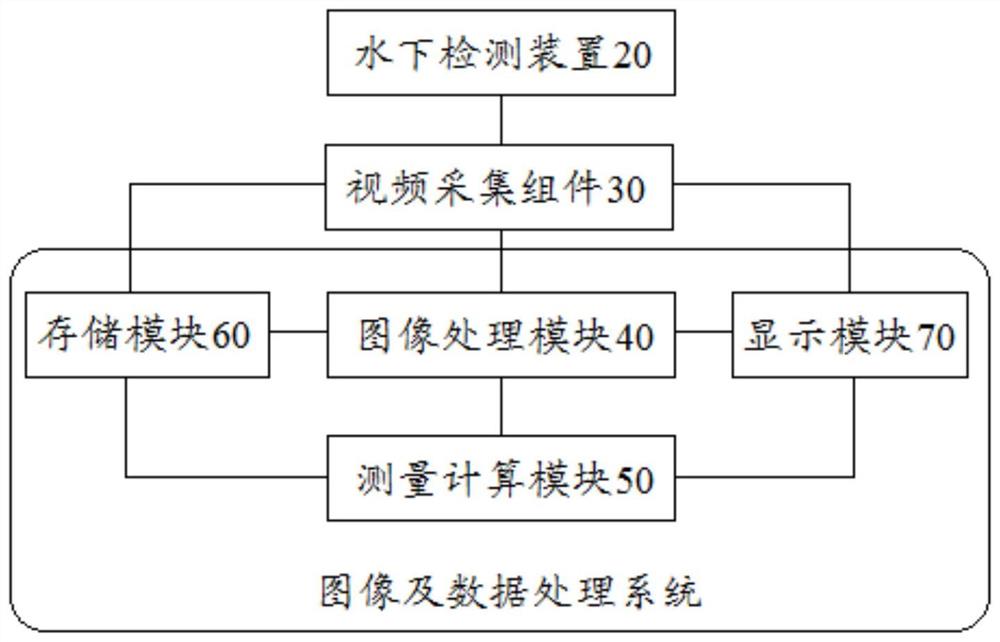
图2为本发明核电站乏燃料贮存格架自动定位与缺陷检测系统的一个实例示意图。
图3为图2中水下检测装置的总体结构示意图。
图4为图2中图像处理模块的示意图。
图5为图2中测量计算模块的示意图。
具体实施方式
为了使本发明的目的、技术方案及其有益技术效果更加清晰,以下结合附图和具体实施方式,对本发明进行进一步详细说明。应当理解的是,本说明书中描述的具体实施方式仅仅是为了解释本发明,并非为了限定本发明。
请参阅图2,本发明核电站乏燃料贮存格架自动定位与缺陷检测系统包括水下检测装置20、视频采集组件30和图像及数据处理系统。其中,图像及数据处理系统包括图像处理模块40和测量计算模块50。优选地,图像及数据处理系统还包括存储模块60和显示模块70。
请参阅图3,水下检测装置20是适于乏燃料组件抓具抓取的水下检测装置,其包括上管座201、连接螺杆202、承重托盘203、定位法兰204、上连接杆205、连接法兰206、下连接杆207、水下摄像头组件208、连接锁紧件209、摄像头护套210、导向防撞缓冲装置211及护套底座212。上管座201与乏燃料组件抓具配合;承重托盘203通过6根连接螺杆202连接在上管座201下方,并与上连接杆205的上端连接。定位法兰204位于承重托盘203下方,主要用于当本装置放置在升降机燃料舱或贮存小室中时基本处于中心位置以便于乏燃料组件抓具的抓取。连接杆包括上连接杆205与下连接杆207两节,组装时上连接杆205与下连接杆207通过连接法兰206连接。水下摄像头组件208通过连接锁紧件209连接在下连接杆207的下端。摄像头组件208外部设置有摄像头护套210,导向防撞缓冲装置211设于摄像头护套210的周边以对其进行导向和保护。连接杆205与207为内设通孔的空心结构,水下摄像头组件208的电缆穿过连接杆205、207的通孔与视频采集组件30连接。水下摄像头组件208用于拍摄贮存小室开口处的视频图像,还用于拍摄贮存小室内壁的视频图像。连接杆205与207有短杆和长杆两种类型,根据实际需要进行替换,例如,格架定位时拍摄贮存小室开口处的视频图像,不需要进入贮存小室中,为了提高定位精度采用150mm的短杆;缺陷检测时拍摄贮存小室内壁的视频图像,需要进入贮存小室中,采用长杆。
视频采集组件30用于采集水下摄像头组件208拍摄的视频图像,具体可以是视频采集卡或视频采集专用设备、服务器等。
图像处理模块40用于对水下摄像头组件208拍摄的视频图像进行处理:包括在格架定位时对水下摄像头组件208拍摄的贮存小室开口处的视频图像进行处理,得到贮存小室的轮廓;还包括在格架内壁缺陷检测时,对水下摄像头组件208拍摄的贮存小室内壁的视频图像进行处理,得到显示小室内壁缺陷情况的图片。
请参阅图4,图像处理模块40包括图像预处理单元41、图像校正单元42、边缘分割与提取单元43、色差比较与识别单元44。图像预处理单元41用于对视频图像进行图像增强、降噪等预处理;图像校正单元42用于通过全景视频技术将视频图像校正为无畸变平面图形,还可以按照格架贮存小室高度方向对图像进行拼接;边缘分割与提取单元43用于对贮存小室开口处的无畸变平面图形进行边缘分割与提取,得到该贮存小室的轮廓;色差比较与识别单元44用于对贮存小室内壁的无畸变平面图形进行色差比较与识别,得到显示小室内壁缺陷情况的图片。
测量计算模块50用于根据该贮存小室的轮廓定位出贮存小室中心,计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L,结合乏燃料组件抓具的坐标计算得到贮存小室的实际坐标;还用于根据小室内壁缺陷情况的图片计算锈蚀区域大小及裂纹严重程度。
请参阅图5,测量计算模块50包括小室中心定位单元51、偏移量计算单元52、小室坐标计算单元53、乏燃料贮存格架定位单元54和缺陷计算单元55。小室中心定位单元51用于根据贮存小室的轮廓定位出贮存小室中心。偏移量计算单元52用于计算水下摄像头组件视野中心相对乏燃料组件抓具的坐标偏移量L1、计算贮存小室中心相对水下摄像头组件视野中心的坐标偏移量L2,并通过L=L1+L2计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L。小室坐标计算单元53用于根据贮存小室中心相对乏燃料组件抓具的坐标偏移量L和对应的乏燃料组件抓具坐标,计算得到贮存小室的实际坐标。乏燃料贮存格架定位单元54用于根据定位试验选取的全部特征贮存小室的实际坐标,计算出全部贮存小室的实际坐标,实现整个乏燃料贮存格架的精确定位。缺陷计算单元55用于根据小室内壁缺陷情况的图片计算锈蚀区域大小及裂纹严重程度。
存储模块60用于存储水下摄像头组件208拍摄的视频图像、图像处理模块的处理结果、测量计算模块的计算结果中的一种或几种,如水下摄像头组件208拍摄的贮存小室开口处的视频图像及贮存小室内壁的视频图像,图像处理模块处理后的贮存小室的轮廓和小室内壁缺陷情况的图片,测量计算模块计算出的水下摄像头组件视野中心相对乏燃料组件抓具的坐标偏移量L1、每次定位检测时贮存小室中心相对水下摄像头组件视野中心的坐标偏移量L2、对应的乏燃料组件抓具坐标以及贮存小室中心相对乏燃料组件抓具的坐标偏移量L、各个贮存小室的实际坐标、生成的乏燃料贮存格架坐标文件、锈蚀区域大小及裂纹严重程度等。
显示模块70用于显示水下摄像头组件208拍摄的视频图像、图像处理模块的处理结果、测量计算模块的计算结果中的一种或几种,如水下摄像头组件208拍摄的贮存小室开口处的视频图像及贮存小室内壁的视频图像,图像处理模块处理后的贮存小室的轮廓和小室内壁缺陷情况的图片,测量计算模块计算出的水下摄像头组件视野中心相对乏燃料组件抓具的坐标偏移量L1、每次定位检测时贮存小室中心相对水下摄像头组件视野中心的坐标偏移量L2、对应的乏燃料组件抓具坐标以及贮存小室中心相对乏燃料组件抓具的坐标偏移量L、各个贮存小室的实际坐标、生成的乏燃料贮存格架坐标文件、锈蚀区域大小及裂纹严重程度等。
优选地,图像及数据处理系统还包括光照控制模块,光照控制模块用于对水下摄像头组件208拍摄时的光照情况进行控制,以得到更为清晰的视频图像。
本发明核电站乏燃料贮存格架自动定位与缺陷检测系统与PMC系统设备一起配合使用,能够协助操作人员安全、准确、高效地实现乏燃料贮存格架自动定位试验以及燃料格架内壁缺陷检查工作。
本发明核电站乏燃料贮存格架自动定位试验方法,包括以下步骤:
步骤101,通过乏燃料组件抓具将水下检测装置抓取到乏燃料贮存格架上方,利用水下摄像头组件的全景摄像头拍摄贮存小室开口处的视频图像,并将对应的乏燃料组件抓具坐标输入到图像及数据处理系统中。
具体地,在通过乏燃料组件抓具将水下检测装置抓取到乏燃料贮存格架上方之前,还需要先在基准点分别使用乏燃料组件抓具和水下检测装置进行定位,确定整个坐标系统的零点位置,并且确定水下检测装置的水下摄像头组件视野中心与乏燃料组件抓具的坐标偏移量L1,然后将L1输入到核电站乏燃料贮存格架自动定位与缺陷检测系统的存储模块60中存储。优选为以新燃料升降机位置作为基准点。
具体地,通过乏燃料组件抓具将水下检测装置抓取到乏燃料贮存格架上方时,操作乏吊在乏燃料贮存格架上方运行,当期望定位的贮存小室进入到水下摄像头组件视野中央位置时,进行定位拍摄,并且将对应的乏燃料组件抓具坐标(即乏吊的大车和小车的当前坐标)输入到核电站乏燃料贮存格架自动定位与缺陷检测系统的存储模块60中存储。水下摄像头组件采用全景摄像头,拍摄的贮存小室开口处的视频图像是360°全方位视频图像。
步骤102,采集该贮存小室开口处的视频图像,并对其进行处理,得到该贮存小室的轮廓。
通过水下摄像头组件拍摄贮存小室开口处的360°全方位视频图像,能够获取到贮存小室开口处的真实影像资料,但视频画面会产生弯折和很大的畸变。因此,在采集360度全方位视频图像后,先对其进行图像增强、降噪等预处理,然后通过全景视频技术将图像校正为无畸变平面图形,再对无畸变平面图形进行边缘分割与提取,得到该贮存小室的轮廓。
步骤103,根据该贮存小室的轮廓定位出贮存小室中心,计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L,结合乏燃料组件抓具的当前坐标计算得到贮存小室的实际坐标。
其中,计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L的具体步骤为:计算贮存小室中心相对水下摄像头组件视野中心的坐标偏移量L2,结合水下摄像头组件视野中心相对乏燃料组件抓具的坐标偏移量L1,通过L=L1+L2计算贮存小室中心相对乏燃料组件抓具的坐标偏移量L。需要注意的是,坐标偏移量L、L1、L2均包括横坐标和纵坐标,并非单向长度。
具体地,定位贮存小室中心以及计算贮存小室中心相对水下摄像头组件视野中心的坐标偏移量L2是利用视频测量技术,根据无畸变平面图形中的像素点来进行定位和计算的。
步骤104,重复上述步骤,计算出定位试验选取的全部特征贮存小室的实际坐标,然后根据特征贮存小室的实际坐标计算出全部贮存小室的实际坐标,实现整个乏燃料贮存格架的精确定位。
具体地,计算出全部贮存小室的实际坐标后,将其生成乏燃料贮存格架坐标文件,该文件可以直接将全部贮存小室的实际坐标数据导入到乏吊的PLC中。
具体地,步骤102~103为实时在线处理,在进行步骤102~103时,还可以同时将水下摄像头组件拍摄的贮存小室开口处的视频图像输入核电站乏燃料贮存格架自动定位与缺陷检测系统的存储模块60存储,以供离线后进行复查或后期处理。离线后进行复查或后期处理时,如发现在线处理的异常或者疏漏,可以对在线处理的数据进行修正。
本发明核电站乏燃料贮存格架缺陷检测方法,包括以下步骤:
步骤201,通过乏燃料组件抓具将水下检测装置抓取到拟检查的贮存小室上方,并下降至该贮存小室内部,利用水下摄像头组件拍摄贮存小室内壁的视频图像。
具体地,拍摄的贮存小室内壁的视频图像是360°全方位视频图像。
步骤202,采集贮存小室内壁的视频图像,并对其进行处理与拼接,得到显示小室内壁缺陷情况的图片。
通过水下摄像头组件拍摄贮存小室内壁的360°全方位视频图像,能够获取到贮存小室内壁的真实影像资料,但视频画面会产生弯折和很大的畸变。因此,在采集360度全方位视频图像后,先对其进行图像增强、降噪等预处理,然后通过全景视频技术将图像校正为无畸变平面图形,并按照乏燃料贮存小室高度方向进行拼接,再对拼接后的图像进行色差比较与识别,得到显示小室内壁缺陷情况的图片。
步骤203,根据小室内壁缺陷情况的图片计算缺陷区域大小,并将小室内壁缺陷情况的图片以及计算结果在显示模块上显示,供操作人员进行目视检查,判断缺陷严重程度。
具体地,步骤202~203为实时在线处理,在进行步骤202~203时,还可以同时将水下摄像头组件拍摄的贮存小室内壁的视频图像输入存储模块60存储,以供离线后进行复查或后期处理。离线后进行复查或后期处理时,如发现在线处理的异常或者疏漏,可以对在线处理的数据进行修正。
与现有的人工手动测量方法相比,本发明核电站乏燃料贮存格架自动定位与缺陷检测系统及方法至少在安全、质量和效率三个方面产生了较为巨大地进步,具体来说:
1)从安全角度看,本发明可以避免因操作人员下到乏燃料水池中的燃料格架上方目视查看定位而带来的引入异物及操作人员坠落等风险;
2)在工程调试阶段,本发明能够提供一种完成乏燃料贮存格架定位试验的自动化方法,确保结果的精确性和一致性,有效避免操作人员因工作疲劳及视觉误差导致的精度有限问题;
3)从进度角度看,PMC调试处于机组接料和装料等关键路径上,本发明成功解决了乏燃料贮存格架定位试验所需工时大的问题,可节约调试关键路径工期,对整个核电站的建造工期做出较大贡献;
4)在役机组格架更换后无需排水即可完成重新定位与校准工作,这将进一步提升在运机组的安全性;
5)本发明为水下检测贮存小室内壁缺陷提供了良好的手段,其操作简单,获取的实物信息实时清晰,并可以通过视频存储以方便回溯;
6)本发明能够对格架缺陷进行自动识别,可以在较大程度上减少操作人员的工作量,从而提升工作效率;
7)本发明将乏燃料贮存格架定位试验和缺陷检测需求较好的统一协调起来,实现一套装置具备多个功能,具有较好的经济性和实用性。
根据上述说明书的揭示和教导,本发明所属领域的技术人员还可以对上述实施方式进行适当的变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。