连杆旋翼头及无人机
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及飞行器技术领域,尤其是涉及一种连杆旋翼头及无人机。
背景技术
旋翼是直升机的主要升力部件,旋翼由旋翼头和数片桨叶构成,旋翼头安装在旋翼轴上,细长的桨叶则安装在旋翼头上。舵机通过螺距传动结构控制桨叶的倾斜角度,改变桨叶的螺距,让直升机做出相应的动作。
现有连杆旋翼头的螺距传动结构包括下倾斜盘、上倾斜盘和螺距相位连杆,舵机控制下倾斜盘的位置和角度,下倾斜盘带动上倾斜盘活动,桨叶和上倾斜盘通过螺距相位连杆相连,上倾斜盘通过螺距相位连杆改变桨叶的螺距。由于上倾斜盘没有角度限制,所以飞行过程中桨叶的转动会造成上倾斜盘和螺距相位连杆偏位,发生斜向传动的现象,导致传动精度低,倾斜盘磨损严重。
发明内容
本发明的目的在于至少解决现有技术中存在的技术问题之一,为此,本发明提出一种连杆旋翼头,能够避免螺距传动过程中的斜向传动现象,提高传动精度。
本发明还提出一种具有上述连杆旋翼头的无人机。
根据本发明第一方面实施例的连杆旋翼头,包括:主轴;旋翼座,旋翼座设置在主轴上端;旋翼组件,旋翼组件可转动地设置在旋翼座上;倾斜盘组件,倾斜盘组件可活动地套设在主轴上;以及连杆组件,倾斜盘组件通过连杆组件驱动旋翼组件转动,连杆组件包括相位连杆、相位摇臂和螺距连杆,相位摇臂可转动地设置在旋翼座上,相位摇臂的一端通过相位连杆与倾斜盘组件可活动地连接,相位摇臂的另一端通过螺距连杆与旋翼组件可活动地连接。相位连杆与倾斜盘组件通过球头铰接,相位连杆与相位摇臂通过转轴铰接,相位摇臂与螺距连杆通过球头铰接,螺距连杆与旋翼组件通过球头铰接。
根据本发明实施例的连杆旋翼头,至少具有如下有益效果:以主轴左侧的连杆组件为例,当倾斜盘组件沿主轴上升时,相位连杆上升带动相位摇臂的后端上升、前端下降,从而使螺距连杆下降带动旋翼组件转动。由此,舵机的操控量通过相位摇臂传递,而相位摇臂是设置在旋翼座上的,且相位摇臂只能在垂直于左右方向的平面内转动,因此螺距连杆和相位连杆也只能在最垂直于左右方向的平面内活动,不会出现左右偏位,避免螺距传动的过程中发生斜向传动的现象,提高传动精度。
根据本发明的一些实施例,转轴为固定螺丝,固定螺丝穿设在相位连杆与相位摇臂中,固定螺丝与相位连杆之间设置有轴承。
根据本发明的一些实施例,旋翼组件包括:旋翼夹,旋翼夹可转动地设置在旋翼座上,螺距连杆与旋翼夹铰接;以及叶片,叶片设置在旋翼夹远离旋翼座的一侧。
根据本发明的一些实施例,螺距连杆上端与旋翼组件背风侧铰接。
根据本发明的一些实施例,旋翼组件和连杆组件均设置有两组,两组旋翼组件和两组连杆组件均沿主轴的轴心中心对称设置。
根据本发明的一些实施例,倾斜盘组件包括:下倾斜盘,下倾斜盘套设在主轴上,下倾斜盘通过若干下连杆与舵机相连;以及上倾斜盘,上倾斜盘套设在主轴上,上倾斜盘可相对下倾斜盘转动地设置在下倾斜盘上端,上倾斜盘与相位连杆铰接。
根据本发明的一些实施例,螺距连杆为塑胶注塑件。
根据本发明第二方面实施例的无人机,包括根据本发明上述第一方面实施例的连杆旋翼头。
根据本发明实施例的无人机,通过采用上述连杆旋翼头,提升航向稳定性,降低了零件的工作负载,延长零件实用寿命。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
下面结合附图和实施例对本发明进一步地说明;
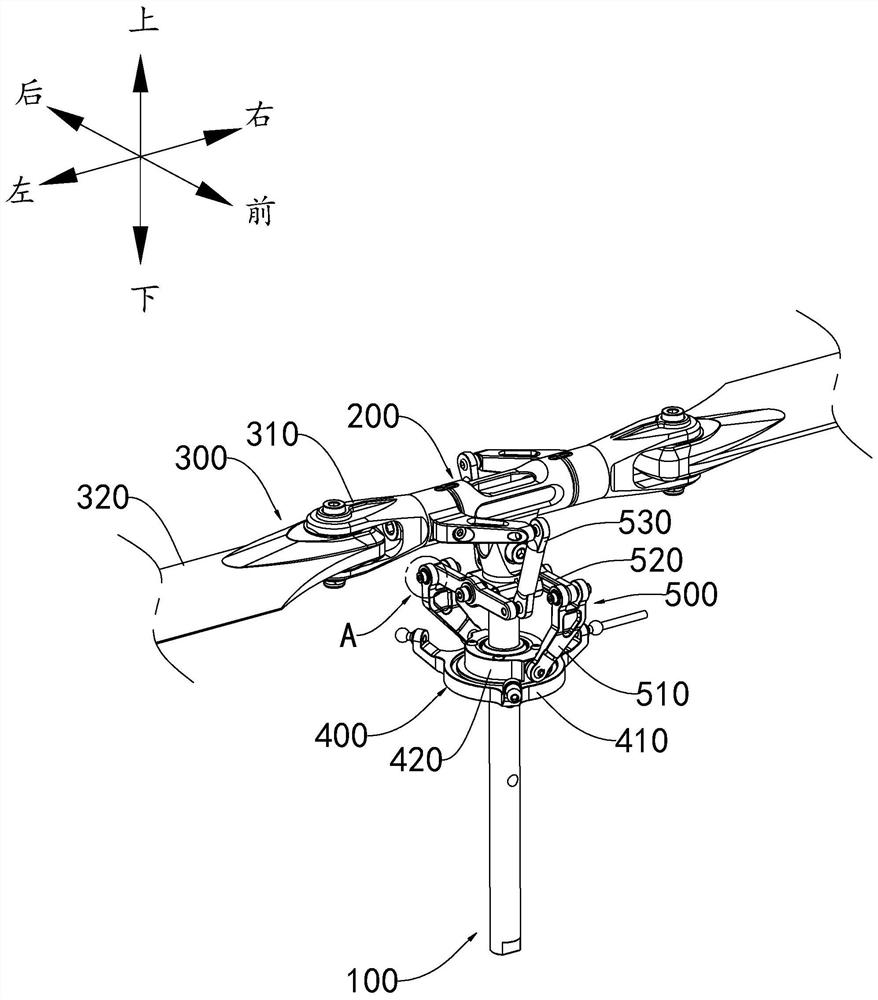
图1是本发明实施例的连杆旋翼头的结构示意图;
图2是图1所示连杆旋翼头的主视图;
图3是图1所示连杆旋翼头的左视图;
图4是图1所示A处的局部放大图。
附图标记:
主轴100;
旋翼座200;
旋翼组件300;旋翼夹310;叶片320;
倾斜盘组件400;下倾斜盘410;上倾斜盘420;
连杆组件500;相位连杆510;相位摇臂520;螺距连杆530;固定螺丝541;轴承542。
具体实施方式
本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
参考图1至图4描述根据本发明实施例的连杆旋翼头。
如图1至图3所示,根据本发明实施例的连杆旋翼头,包括:主轴100、旋翼座200、旋翼组件300、倾斜盘组件400以及连杆组件500,旋翼座200设置在主轴100上端;旋翼组件300可转动地设置在旋翼座200上;倾斜盘组件400可活动地套设在主轴100上;倾斜盘组件400通过连杆组件500驱动旋翼组件300转动,连杆组件500包括相位连杆510、相位摇臂520和螺距连杆530,相位摇臂520可转动地设置在旋翼座200上,相位摇臂520的一端通过相位连杆510与倾斜盘组件400可活动地连接,相位摇臂520的另一端通过螺距连杆530与旋翼组件300可活动地连接。相位连杆510与倾斜盘组件400通过球头铰接,相位连杆510与相位摇臂520通过转轴铰接,相位摇臂520与螺距连杆530通过球头铰接,螺距连杆530与旋翼组件300通过球头铰接。
例如,如图1至图3所示,相位连杆510设置在倾斜盘组件400后侧,并朝左上方延伸,相位摇臂520可转动地设置在旋翼座200下端的左侧,相位摇臂520的后端与相位连杆510的上端铰接,相位摇臂520的前端与螺距连杆530的下端铰接,螺距连杆530的上端与旋翼组件300的前端铰接。具体地,以主轴100左侧的连杆组件500为例,当倾斜盘组件400沿主轴100上升时,相位连杆510上升带动相位摇臂520的后端上升、前端下降,从而使螺距连杆530下降带动旋翼组件300转动。由此,舵机的操控量通过相位摇臂520传递,而相位摇臂520是设置在旋翼座200上的,且相位摇臂520只能在垂直于左右方向的平面内转动,因此螺距连杆530和相位连杆510也只能在最垂直于左右方向的平面内活动,不会出现左右偏位,避免螺距传动的过程中发生斜向传动的现象,提高传动精度。
如图1至图4所示,相位摇臂520通过沿左右方向设置的转轴可转动设置在旋翼座200下端的左侧,因此相位摇臂520只能绕转轴在垂直于左右方向的平面内转动;对于相位连杆510,由于相位连杆510通过沿左右方向设置的转轴与相位摇臂520连接,因此相位连杆510也只能在垂直于左右方向的平面内移动,不会发生左右位偏。对于螺距连杆530,由于螺距连杆530的两端分别与相位摇臂520和旋翼组件300铰接,由于相位摇臂520和旋翼组件300相对于旋翼座200都只能在垂直于左右方向的平面内转动,因此螺距连杆530不会受到左右方向上的力,也不会发生左右位偏。由此避免螺距传动的过程中发生斜向传动的现象。
在本发明的一些具体实施例中,转轴为固定螺丝541,固定螺丝541穿设在相位连杆510与相位摇臂520中,固定螺丝541与相位连杆510之间设置有轴承542。例如,如图4所示,通过设置轴承542减少转动产生的磨损,降低本连杆旋翼头的维护成本。
在本发明的一些具体实施例中,旋翼组件300包括:旋翼夹310以及叶片320,旋翼夹310可转动地设置在旋翼座200上,螺距连杆530与旋翼夹310铰接;叶片320设置在旋翼夹310远离旋翼座200的一侧。例如,如图1至图3所示,用于螺距传动的连杆组件500与旋翼夹310连接,叶片320安装在旋翼夹310上,由此可以单独对叶片320进行更换和调整,无需要拆卸连杆组件500和旋翼夹310,避免多次拆装对连接处的零件造成磨损,影响本连杆旋翼头的精度。
在本发明的一些具体实施例中,螺距连杆530上端与旋翼组件300背风侧铰接。例如,如图1所示,由于相位摇臂520的设置,倾斜盘组件400上升会导致螺距连杆530下降,因此将螺距连杆530的上端与旋翼组件300背风侧铰接。具体地,当舵机摆臂向上摆动时,倾斜盘组件400会向上移动,相位连杆510向上移动,螺距连杆530向下移动,旋翼组件300的背风侧向下移动,使旋翼组件300产生正螺距。由此使舵机控制方向的方式符合一般操作人员的操作习惯。
在本发明的一些具体实施例中,旋翼组件300和连杆组件500均设置有两组,两组旋翼组件300和两组连杆组件500均沿主轴100的轴心中心对称设置。例如,如图1至图3所示,旋翼组件300和连杆组件500的中心对称设置,使本连杆旋翼头在工作的过程中受力更加均,进一步提高传动的精度,降低零件磨损。
在本发明的一些具体实施例中,倾斜盘组件400包括:下倾斜盘410以及上倾斜盘420,下倾斜盘410套设在主轴100上,下倾斜盘410通过若干下连杆与舵机相连;上倾斜盘420套设在主轴100上,上倾斜盘420可相对下倾斜盘410转动地设置在下倾斜盘410上端,上倾斜盘420与相位连杆510铰接。
例如,如图1至图3所示,舵机的操控量通过下连杆传递下倾斜盘410上,改变下倾斜盘410的位置和角度,上倾斜盘420的位置和角度随着下倾斜盘410改变,但上倾斜盘420可相对下倾斜盘410转动,当飞行器飞行时,主轴100驱动旋翼组件300旋转,旋转组件通过连杆组件500带动上倾斜盘420转动。现有结构中上倾斜盘420支架通过连杆拉动旋翼组件300,由于飞行器飞行时上下倾斜盘410的相对转速很高,此时推动倾斜盘组件400改变螺距会使倾斜盘组件400磨损严重。而在本连杆旋翼头中,由于相位摇臂520设置在旋翼座200上,使旋翼座200在飞行器飞行时承担一部分传动力矩,避免倾斜盘直接受力,降低倾斜盘的损耗。
在本发明的一些具体实施例中,螺距连杆530为塑胶注塑件。例如,如图3所示,由于相位连杆510和相位摇臂520的设置,螺距连杆530不再直接连接倾斜盘组件400和旋翼组件300,因此螺距连杆530的长度相比于现有技术中螺距传动的连杆长度更短,螺距连杆530采用塑胶注塑件即可满足强度要求,降低了生产成本。
根据本发明第二方面实施例的无人机,包括根据本发明上述第一方面实施例的连杆旋翼头。
根据本发明实施例的无人机,通过采用上述连杆旋翼头,提升航向稳定性,降低了零件的工作负载,延长零件实用寿命。
根据本发明实施例的无人机的其他构成以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。