一种袋装粮食全自动装车系统
文献发布时间:2023-06-19 13:49:36
技术领域
本发明属于货车装载领域,特别涉及一种袋装粮食全自动装车系统。
背景技术
随着我国经济的快速发展及人们生活水平的提高,近年来我国逐步出现了劳动力短缺的现象,特别使粗活、笨活劳动力更是短缺。原来那种依靠人力的装卸情况将逐步被无人化的装卸方式所取代。
目前市场上常见的装车设备,大多只能将袋装货物输送到车辆位置,而码垛装车交给人工完成。这样的设备有以下几大危害。首先自动灌包机的速度可以达到1000包/小时,为了及时的处理输送机上的物料,工人超强负荷劳动。其次,工人码垛时会产生非常大的灰尘,即使加了除尘设备,工人依旧时在粉尘中工作,外加高强度劳动,很多灰尘会进入到肺的深处,对工人的身体造成非常大损伤。而且工人的码垛速度无法跟上自动灌包机的产能,导致装车效率较低,不利于使用。
发明内容
针对背景技术中提到的问题,本发明的目的是提供一种袋装粮食全自动装车系统,以解决常见的装车设备需要人工码垛,人工码垛不仅效率差,而且容易对工作人员造成危害的问题。
本发明的上述技术目的是通过以下技术方案得以实现的:
一种袋装粮食全自动装车系统,包括单排高架钢梁、组排高架钢梁,所述单排高架钢梁与组排高架钢梁均设有多组,所述单排高架钢梁的顶部均固定安装有钢轨,所述组排高架钢梁的顶部左侧同样固定安装有钢轨,所述钢轨的顶部之间固定安装有移动平台车,所述组排高架钢梁的顶部中端固定安装有传输机构,所述移动平台车的正面固定安装有引导机构,所述移动平台车的顶部后端固定安装有暂存皮带输送机,所述移动平台车的顶部前端固定安装有滚筒输送机,所述移动平台车的顶部右侧固定安装有桁架机械手,所述组排高架钢梁的顶部右侧均固定连接有连接柱,所述连接柱的顶部均固定连接有检修平台,所述检修平台的顶部左侧固定安装有PLC控制器。
通过采用上述技术方案,设置单排高架钢梁与组排高架钢梁,单排高架钢梁与组排高架钢梁的高度相同,进而保证钢轨上移动平台车移动时的稳定性,移动平台车上设有引导机构,引导机构用于指引货车停放在指定位置,以便进行装车工作,设置传输机构,传输机构用于对粮袋进行运输,当粮袋输送至移动平台车附近时,将撞击到移动平台车上的暂存皮带输送机上,并在暂存皮带输送机的作用下进行运输,将其运输到滚筒输送机上,桁架机械手可以左右、前后和上下移动,末端可以90度旋转,当机械手移动至粮袋存放位置时,机械手下降将粮袋抓起,同时平移和侧移,以便到达码垛位置上方,机械手下降,在离车厢底部50cm左右高度时将粮袋放下,即可完成粮袋的码放,机械手重复该工作,即可完成码放,当一排完全码放完成之后,移动平台车可以进行前后移动,以便对整个车厢进行码放,检修平台用于方便工作人员进行工作,以便对卡住的粮袋进行位置调整,PLC控制器用于方便工作人员对该系统的运行进行操控。
进一步地,作为优选技术方案,所述引导机构包括安装架、滑轨、激光指引器,所述移动平台车的正面固定连接有安装架,所述安装架的正面上端固定安装有滑轨,所述滑轨的顶部固定安装有激光指引器。
通过采用上述技术方案,设置安装架,安装架正面上端设有滑轨,激光指引器安装在滑轨上,使得激光指引器可以通过滑轨调整其位置,激光指引器按照货车大小调整照射位置,以便射出激光,使其投射在地面上,司机调整货车位置,以便与激光位置相对应,从而即可保证装车工作可以正常进行。
进一步地,作为优选技术方案,所述检修平台的顶部外侧均固定连接有防护栏。
通过采用上述技术方案,设置防护栏,防护栏用于对检修平台顶部进行保护,以便提高工作人员工作时的安全性,避免工作人员在工作过程中出现危险。
进一步地,作为优选技术方案,所述检修平台的正面固定连接有爬梯,所述爬梯的左右两侧均固定连接有扶手栏。
通过采用上述技术方案,设置爬梯,爬梯位于检修平台的正面,通过爬梯工作人员即可爬上检修平台,以便进行工作,扶手栏用于提高工作人员攀爬时的安全性,避免出现脱手掉落的情况。
进一步地,作为优选技术方案,所述传输机构包括平移皮带输送机、爬坡皮带输送机,所述组排高架钢梁的顶部均固定安装有平移皮带输送机,所述组排高架钢梁的前端固定安装有爬坡皮带输送机,所述爬坡皮带输送机的末端与平移皮带输送机的前端相连接。
通过采用上述技术方案,设置爬坡皮带输送机,粮袋首先通过爬坡皮带输送机进行传输,以便将粮袋持续向上运输,由于爬坡皮带输送机的末端与平移皮带输送机的前端相连接,当粮袋运输到上方之后将在平移皮带输送机的作用下进行平移,以便将其运输到移动平台车上,从而方便进行后续装车工作,从而达到节省人力的目的。
进一步地,作为优选技术方案,所述移动平台车的底部四个拐角处均固定安装有移动轮,所述移动平台车的内部固定安装有伺服电机,所述移动轮通过伺服电机进行驱动。
通过采用上述技术方案,设置伺服电机,伺服电机通电进行工作,即可驱动移动轮进行转动,当移动轮转动时,即可调整移动平台车在钢轨上的位置,以便对货车进行全面装车。
进一步地,作为优选技术方案,所述单排高架钢梁与组排高架钢梁的底部均固定连接有撑地座。
通过采用上述技术方案,设置撑地座,撑地座用于提高单排高架钢梁与组排高架钢梁对于地面的支撑能力,以便进一步提高该系统运行时的平稳性。
进一步地,作为优选技术方案,所述暂存皮带输送机呈L形,所述暂存皮带输送机的末端与滚筒输送机的前端相连接。
通过采用上述技术方案,将暂存皮带输送机设为L形,使得其上的粮袋可以进行转弯,以便其可以顺利运输到滚筒输送机上。
综上所述,本发明主要具有以下有益效果:
第一、通过设置安装架,安装架正面上端设有滑轨,激光指引器安装在滑轨上,使得激光指引器可以通过滑轨调整其位置,激光指引器按照货车大小调整照射位置,以便射出激光,使其投射在地面上,司机调整货车位置,以便与激光位置相对应,从而即可达到保证装车工作顺利进行的目的;
第二、设置爬坡皮带输送机,粮袋首先通过爬坡皮带输送机进行传输,以便将粮袋持续向上运输,由于爬坡皮带输送机的末端与平移皮带输送机的前端相连接,当粮袋运输到上方之后将在平移皮带输送机的作用下进行平移,以便将其运输到移动平台车上,从而方便进行后续装车工作,从而达到节省人力的目的;
第三、设置移动平台车,当粮袋输送至移动平台车附近时,将撞击到移动平台车上的暂存皮带输送机上,并在暂存皮带输送机的作用下进行运输,将其运输到滚筒输送机上,桁架机械手可以左右、前后和上下移动,末端可以90度旋转,当机械手移动至粮袋存放位置时,机械手下降将粮袋抓起,同时平移和侧移,以便到达码垛位置上方,机械手下降,在离车厢底部50cm左右高度时将粮袋放下,即可完成粮袋的码放工作。
附图说明
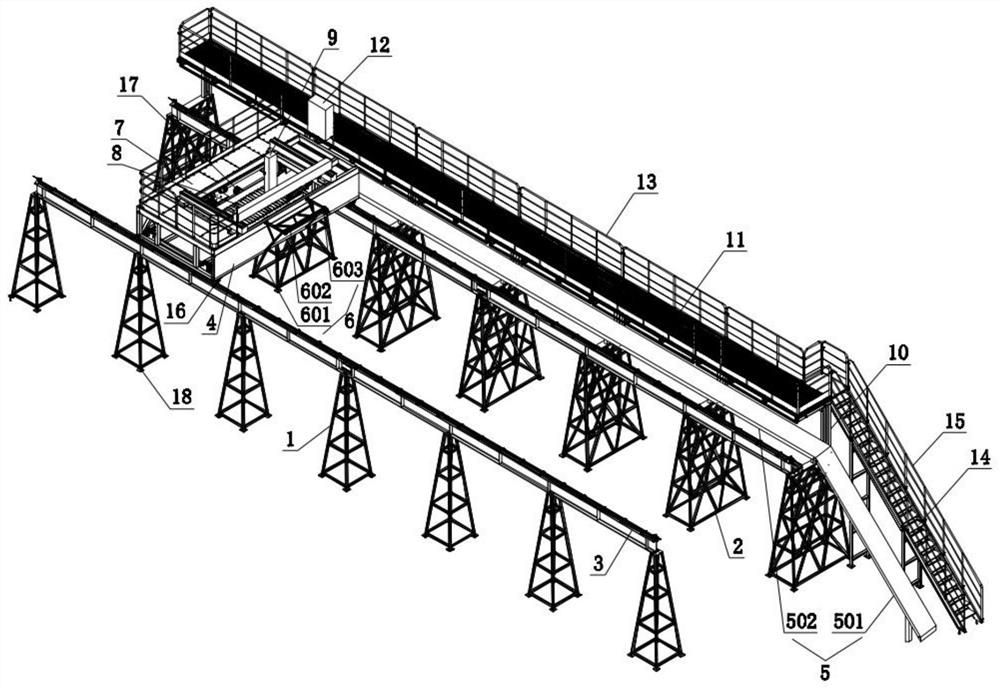
图1是本发明的立体图;
图2是本发明的俯视图;
图3是本发明的侧视图;
图4是本发明的电路连接模块示意图。
附图标记:1、单排高架钢梁,2、组排高架钢梁,3、钢轨,4、移动平台车,5、传输机构,501、平移皮带输送机,502、爬坡皮带输送机,6、引导机构,601、安装架,602、滑轨,603、激光指引器,7、暂存皮带输送机,8、滚筒输送机,9、桁架机械手,10、连接柱,11、检修平台,12、PLC控制器,13、防护栏,14、爬梯,15、扶手栏,16、移动轮,17、伺服电机,18、撑地座。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
参考图1-4,本实施例所述的一种袋装粮食全自动装车系统,包括单排高架钢梁1、组排高架钢梁2,单排高架钢梁1与组排高架钢梁2均设有多组,单排高架钢梁1的顶部均固定安装有钢轨3,组排高架钢梁2的顶部左侧同样固定安装有钢轨3,钢轨3的顶部之间固定安装有移动平台车4,组排高架钢梁2的顶部中端固定安装有传输机构5,移动平台车4的正面固定安装有引导机构6,移动平台车4的顶部后端固定安装有暂存皮带输送机7,移动平台车4的顶部前端固定安装有滚筒输送机8,移动平台车4的顶部右侧固定安装有桁架机械手9,组排高架钢梁2的顶部右侧均固定连接有连接柱10,连接柱10的顶部均固定连接有检修平台11,检修平台11的顶部左侧固定安装有PLC控制器12。
为了达到自动化进行粮袋码放的目的,通过传输机构5运输的粮袋移动到移动平台车4附近时,将撞击到移动平台车4上的暂存皮带输送机7上,并在暂存皮带输送机7的作用下进行运输,将其运输到滚筒输送机8上,桁架机械手9可以左右、前后和上下移动,末端可以90度旋转,当机械手移动至粮袋存放位置时,机械手下降将粮袋抓起,同时平移和侧移,以便到达码垛位置上方,机械手下降,在离车厢底部50cm左右高度时将粮袋放下,即可完成粮袋的码放,机械手重复该工作,即可完成码放工作。
实施例2
参考图1-3,在实施例1的基础上,为了达到对货车进行引导的目的,本实施例对引导方式进行了创新设计,具体地,引导机构6包括安装架601、滑轨602、激光指引器603,移动平台车4的正面固定连接有安装架601,安装架601的正面上端固定安装有滑轨602,滑轨602的顶部固定安装有激光指引器603,设置安装架601,安装架601正面上端设有滑轨602,激光指引器603安装在滑轨602上,使得激光指引器603可以通过滑轨602调整其位置,激光指引器603按照货车大小调整照射位置,以便射出激光,使其投射在地面上,司机调整货车位置,以便与激光位置相对应,从而即可保证装车工作可以正常进行。
参考图1-3,为了达到对工作人员进行保护的目的,本实施例检修平台11的顶部外侧均固定连接有防护栏13,设置防护栏13,防护栏13用于对检修平台11顶部进行保护,以便提高工作人员工作时的安全性,避免工作人员在工作过程中出现危险。
参考图1-3,为了达到方便工作人员爬升的目的,本实施例检修平台11的正面固定连接有爬梯14,爬梯14的左右两侧均固定连接有扶手栏15,设置爬梯14,爬梯14位于检修平台11的正面,通过爬梯14工作人员即可爬上检修平台11,以便进行工作,扶手栏15用于提高工作人员攀爬时的安全性,避免出现脱手掉落的情况。
实施例3
参考图1-2,本实施例在实施例2的基础上,为了达到对粮袋进行自动化运输的目的,本实施例对运输方式进行了创新设计,具体地,传输机构5包括平移皮带输送机501、爬坡皮带输送机502,组排高架钢梁2的顶部均固定安装有平移皮带输送机501,组排高架钢梁2的前端固定安装有爬坡皮带输送机502,爬坡皮带输送机502的末端与平移皮带输送机501的前端相连接,设置爬坡皮带输送机502,粮袋首先通过爬坡皮带输送机502进行传输,以便将粮袋持续向上运输,由于爬坡皮带输送机502的末端与平移皮带输送机501的前端相连接,当粮袋运输到上方之后将在平移皮带输送机501的作用下进行平移,以便将其运输到移动平台车4上,从而方便进行后续装车工作,从而达到节省人力的目的。
参考图1与图3,为了达到使得移动平台车4可以进行移动的目的,本实施例移动平台车4的底部四个拐角处均固定安装有移动轮16,移动平台车4的内部固定安装有伺服电机17,移动轮16通过伺服电机17进行驱动,设置伺服电机17,伺服电机17通电进行工作,即可驱动移动轮16进行转动,当移动轮16转动时,即可调整移动平台车4在钢轨3上的位置,以便对货车进行全面装车。
参考图1,为了达到对该系统进行支撑的目的,本实施例单排高架钢梁1与组排高架钢梁2的底部均固定连接有撑地座18,设置撑地座18,撑地座18用于提高单排高架钢梁1与组排高架钢梁2对于地面的支撑能力,以便进一步提高该系统运行时的平稳性。
参考图1-2,为了达到使粮袋可以进行弯折运输的目的,本实施例暂存皮带输送机7呈L形,暂存皮带输送机7的末端与滚筒输送机8的前端相连接,将暂存皮带输送机7设为L形,使得其上的粮袋可以进行转弯,以便其可以顺利运输到滚筒输送机8上。
使用原理及优点:在使用该系统对货车进行粮袋装载时,司机首先将货车开到该系统下方,工作人员通过PLC控制器12操控激光指引器603进行工作,激光指引器603安装在滑轨602上,使其可以滑动以便调整位置,激光指引器603按照货车大小调整照射位置,以便射出激光,使其投射在地面上,司机调整货车位置,以便与激光位置相对应,从而停好货车,之后工作人员通过PLC控制器12计算出货车的码垛规模,之后工作人员即可通过PLC控制器12操控爬坡皮带输送机502进行工作,粮袋首先通过爬坡皮带输送机502进行传输,以便将粮袋持续向上运输,由于爬坡皮带输送机502的末端与平移皮带输送机501的前端相连接,当粮袋运输到上方之后将在平移皮带输送机501的作用下进行平移,以便将其运输到移动平台车4上,运输到移动平台车4上的粮袋将落在暂存皮带输送机7上,并在暂存皮带输送机7的作用下进行运输,将其运输到滚筒输送机8上,之后桁架机械手9可以左右、前后和上下移动,末端可以90度旋转,当机械手移动至粮袋存放位置时,机械手下降将粮袋抓起,同时平移和侧移,以便到达码垛位置上方,机械手下降,在离车厢底部50cm左右高度时将粮袋放下,即可完成粮袋的码放,机械手重复该工作,即可完成码放,当一排完全码放完成之后,工作人员通过PLC控制器12操控伺服电机17通电进行工作,即可驱动移动轮16进行转动,当移动轮16转动时,即可调整移动平台车4在钢轨3上的位置,移动平台车4可以进行前后移动,以便对整个车厢进行码放,码放完成的货车可以进行称重,以便确认是否按照预定计划码放粮袋。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。